基于改进增广拉格朗日乘子法的鲁棒性主成分分析
2015-06-15杨剑哲孙巧榆程丹松石大明
杨剑哲,孙巧榆,王 君,程丹松,金 野,石大明
(1.哈尔滨工业大学计算机科学与技术学院,150001哈尔滨;2.淮海工学院电子工程学院,222005江苏连云港)
基于改进增广拉格朗日乘子法的鲁棒性主成分分析
杨剑哲1,孙巧榆2,王 君1,程丹松1,金 野1,石大明1
(1.哈尔滨工业大学计算机科学与技术学院,150001哈尔滨;2.淮海工学院电子工程学院,222005江苏连云港)
针对增广的拉格朗日乘子法在求解鲁棒性主成分分析,特别是当数据同时受到稀疏噪声和高斯噪声的干扰时,计算精度会降低,数据降维去噪任务不能很好完成的情况,提出改进的增广拉格朗日乘子法来解决上述问题.一是用基于最优乘子初始化的改进增广拉格朗日乘子法来提高算法的计算精度,二是针对鲁棒性主成分分析,提出一个带高斯噪声的凸优化模型.实验结果表明,本文提出的最优乘子初始化改进算法赋予增广的拉格朗日乘子法一个最优的拉格朗日乘子,从而提高算法的计算精度,而凸优化模型能够清晰地将高斯噪声和稀疏噪声从数据矩阵中分离出去,进而提高数据对高斯噪声的鲁棒性.
鲁棒性主成分分析;拉格朗日乘子的最优初始化;增广的拉格朗日乘子法;凸优化;高斯噪声
现实中存在的高维数据诸如图像、视频、生物信息、文档等大都分布在一个低维的数据空间上.随着科学技术和社会的发展,这些数据的维数也在快速增长.数据维数越高,对数据进行处理的难度和复杂度也就越高.所以在数据处理之前进行有效的数据降维就显得尤为重要[1-4].
主成分分析[1]PCA(principal componentanalysis)作为对高维数据进行数据降维的有效方法之一,是一种无监督的降维方法,它使用奇异值分解SVD(singular value decomposition)对数据进行降维.当高维数据受到的干扰足够小时,主成分分析可表现出良好的性能.然而当高维数据受到的噪声干扰很大时,主成分分析并不能很好地完成降维任务,有时还会给出一个与全局最优解相违背的值.所以为提高主成分分析的鲁棒性,文献[2]提出了鲁棒性主成分分析RPCA(robust principal component analysis).鲁棒性主成分分析定义原始数据矩阵O由两个部分组成:低秩部分P和稀疏噪声部分Q,即原始数据矩阵可以表示为O=P+Q,而稀疏噪声矩阵Q中非零元素大都具有较大的值.实践证明即使在高维数据受到很大的噪声时,鲁棒性主成分分析仍能很好的完成降维任务.在所有求解鲁棒性主成分分析的算法中,增广的拉格朗日乘子法是现有方法中运算速度最快、求解精度最高的算法,但是也发现增广的拉格朗日乘子法还有一些方面需要进一步提升,例如当乘子的初始值不够接近最优值,算法的运算精度将会减小,并且内外层循环的次数也将变多,进而导致增广的拉格朗日乘子法的计算精度减小,这意味着通过赋予乘子一个足够优化的初始值,算法的计算精度会随之提高,而算法中运行奇异值分解的次数也会随之减少.本文提出一种迭代求解的方法来获得足够优化的拉格朗日乘子,进而提高增广拉格朗日乘子法的运算精度.
同时根据文献[5]介绍可知,除了贝叶斯鲁棒性主成分分析之外,其它用于求解鲁棒性主成分分析的方法都基于这样一个假设——原始数据矩阵由低秩数据矩阵和稀疏噪声两部分组成.但是现实中的数据矩阵常常同时受到高斯噪声和稀疏噪声的干扰,现有算法都会因受到高斯噪声的干扰而变得不准确.因此本文为鲁棒性主成分分析提出一个新的凸优化模型,把原始数据分为低秩数据、稀疏噪声和高斯噪声3个部分,并使用一个改进增广的拉格朗日乘子算法来求解这个新的凸优化模型.通过实验结果的对比可知,当原始数据同时受到高斯噪声和稀疏噪声的干扰时,本文方法在求解鲁棒性主成分分析的过程中表现出很好的效果.
1 鲁棒性主成分分析求解方法
鲁棒性主成分分析因其在数据受到稀疏噪声扰动时也能表现出很好的鲁棒性,所以越来越受到人们的关注,并提出了很多用于解决鲁棒性主成分分析的方法[2,5-8,10-13],这些方法一般可被分为3类:基于凸优化模型的方法、基于贝叶斯理论的方法和基于M估计的方法.
1.1 基于贝叶斯理论的方法
贝叶斯鲁棒性主成分分析(bayesian robust principal component analysis,BRPCA)[6]是基于一个分层贝叶斯框架的方法.它将原始数据矩阵看作由3个部分构成:低秩数据部分P,稀疏部分Q和高斯噪声部分R,即在贝叶斯鲁棒性主成分分析中,原始数据矩阵为O=P+Q+R.其对应的贝叶斯模型为O= U(MΛ)V+N。L+R,其中,U∈Rn×k,V∈Rk×m,Λ∈Rk×k是一个对角矩阵,L∈Rn×m,而。表示哈达马积.此外,对角矩阵Λ对角线上的元素取值为0或1,矩阵N的元素取值为0或1且分布稀疏.文献[6]中,使用蒙特卡罗马尔可夫链和变分贝叶斯两种方法来求解该贝叶斯模型.
1.2 基于M估计的方法
考虑到现实数据受到的干扰噪声并不是稀疏的,为了从受到非稀疏噪声干扰的数据中恢复原始数据,文献[7-8]提出一种针对低秩矩阵恢复的鲁棒性框架,该类方法使用鲁棒性的M估计来求解鲁棒性的主成分分析,然后通过求解这个带有正则项的线性逆问题来得到初始M估计问题的解[9].
1.3 基于凸优化模型的方法
基于凸优化模型的方法旨在解决具有以下形式的凸优化问题:

式中:‖P‖∗为矩阵P的核范数,核范数通过计算矩阵奇异值和得到可代表矩阵秩的特性;‖Q‖1为矩阵Q的l1范数;l1范数通过计算矩阵中所有元素的绝对值之和得到可代表矩阵稀疏的特性;λ是一个大于零的权重参数.求解该模型的常用方法有迭代阈值法IT(iterative thresholding approach)[11]、近端梯度法PG(proximal gradientapproach)[11]和加速的近端梯度法APG(accelerate proximal gradient approach)[10,14].
2 基于最优乘子初始化的改进增广拉格朗日乘子法
增广的拉格朗日乘子法ALM(augmented lagrangemultiplier approach)在文献[5]中提出,它几乎是现有基于凸优化模型方法中运算速度最快、精度最高的方法,在每次更新完Y值之后只更新一次Pk,Qk值就足以求出一个收敛解.但是该方法赋予乘子Y的初始值不是乘子的最优值,这将导致算法的运算精度无法达到最优,因此本文提出一种基于最优乘子初始化的改进增广拉格朗日乘子法MEALM(multiplier estimation based augmented lagrange multiplier approach),该方法能够赋予乘子一个最优的初始值并以此提高算法的运算精度.
根据凸优化的对偶理论,可通过求解拉格朗日函数的下确界得到式(1)的拉格朗日对偶函数为

对于乘子Y的每一个值,拉格朗日对偶函数都给出式(1)目标函数‖P‖∗+λ‖Q‖1的最优值的下界.可将式(2)的形式简化成式(3).

由于只有在‖Y‖∗≤1的情况下,拉格朗日对偶函数d(Y)有界,所以将乘子Y的定义域定义为‖Y‖∗≤1,据此定义式(1)的拉格朗日对偶函数为

即可通过最大化d(Y)的值来得到拉格朗日函数L(P,Q,Y,α)的最优下界.它对应的拉格朗日对偶问题为

式(5)在文献[10]中被用来直接求解鲁棒性主成分分析,而在本文则主要用来对拉格朗日乘子提供一个最优值.由于式(5)的目标函数是凸函数,且该问题的限制条件也是凸的,所以式(5)是一个凸优化问题.可通过文献[10]描述的方法来求解式(5),从而得到乘子Y的最优值.此外,由于式(4)满足强对偶性,而且式(5)的最优解确实存在,所以式(1)的任意一个最优解都对应着拉格朗日对偶函数的一个最优下界.可通过求解拉格拉日对偶问题的解来得到鲁棒性主成分分析问题的最优解.
将这个改进算法定义为基于乘子估计的增广拉格朗日乘子法(ME-ALM),详细描述见算法1.
算法1 基于乘子估计的增广拉格朗日乘子法
输入:原始矩阵O,正值参数λ
输出:(P∗,Q∗)
初始化 α0>0;ρ>0;k=0
乘子估计

通过增广拉格朗日乘子法求解鲁棒性主成分分析

3 带高斯噪声的鲁棒性主成分分析模型及其增广拉格朗日乘子法
考虑到数据常常同时受到稀疏噪声和高斯噪声的共同干扰,迫切希望将稀疏噪声和高斯噪声分别从原始数据中清晰地分离出来,而现有的凸优化方法不能很好地完成这一任务,所以本文提出一个新的凸优化模型,并在此基础上提出一种改进的增广拉格朗日乘子法来对该模型进行求解.
新的鲁棒性主成分分析的凸优化模型把现实数据分为低秩数据、稀疏噪声数据和高斯噪声3个部分.该凸优化模型为

式中:‖P‖∗为矩阵P的核范数,‖Q‖1为矩阵Q的l1范数,l1范数在很宽泛的条件下是与矩阵的l0范数‖Q‖0等价的,而‖Q‖0指示了矩阵Q中非零元素的个数.‖G‖F为矩阵G的Frobenius范数,它通过计算所有矩阵元素平方和的开方得到.使用‖G‖F以保证矩阵G中所有元素的值足够小以满足高斯噪声的特性.
为更好地描述这个新的鲁棒性主成分分析模型并且高效地求解该凸优化模型,提出一个改进的增广拉格朗日乘子算法,将这个算法称为用于求解带高斯噪声的鲁棒性主成分分析的改进的增广拉格朗日乘子法G-ALM(augmented lagrange multiplier approach for RPCA with gaussian noise).
对于一个可表示为min f(x),s.t.h(x)=0的约束凸优化问题,它的拉格朗日函数为

式中:y是拉格朗日乘子.为将增广拉格朗日乘子法用于求解新的鲁棒性主成分分析的凸优化模型为

据此可得式(6)的增广拉格朗日函数:

根据增广拉格朗日函数表达式(9),将式(6)的解描述为

式中:(P∗,Q∗,G∗)为矩阵P,Q,G的最优解,假设(Pk,Qk,Gk)代表(P,Q,G)在第k次迭代中的值,那么可通过迭代求解下面提到的3个子问题,进而求解式(10)的最优解,这3个子问题表述为:

式(11)、(12)的解可通过奇异值分解和阈值运算符[5,7]得到,若假设[U,S,V]为矩阵TPk的奇异值分解,那么式(11)、(12)的解可表示为


式中β是一个为阈值运算符设定的正值参数.可根据式(14)、(15)迭代解式(11)、(12)和(13)的最优解.在运算过程中,当计算矩阵P值时,另外两个矩阵Q和G的值是固定的,同样当计算矩阵Q或者矩阵G的值时,另外两个矩阵的值都是固定不变的.通过改进的增广拉格朗日乘子法求解带高斯噪声的鲁棒性主成分分析模型(G-ALM)的过程见算法.
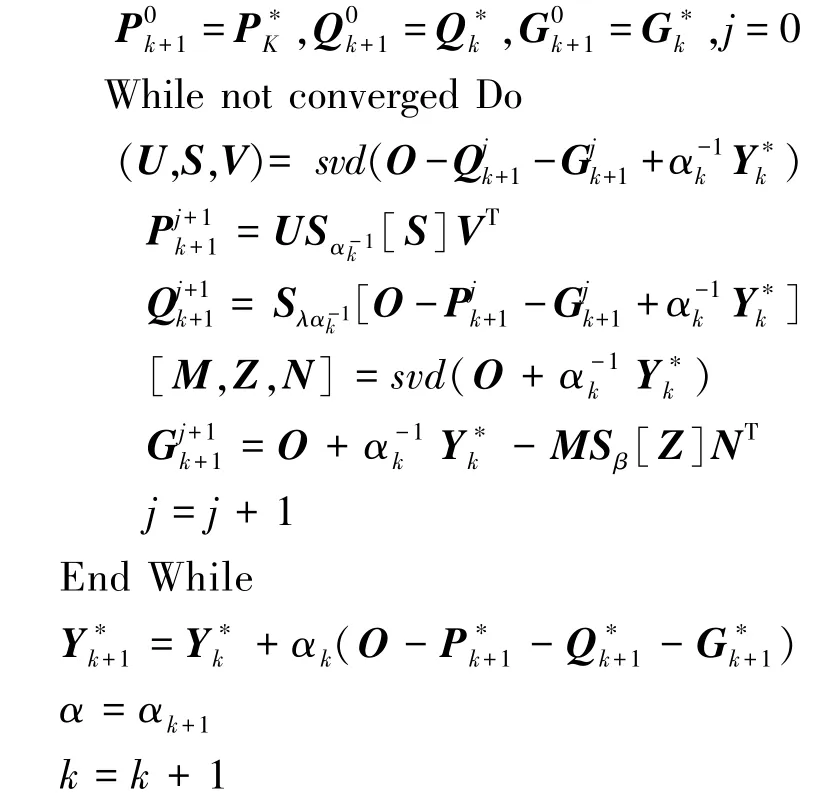
算法2 用于求解带高斯噪声的鲁棒性主成分分析的改进的增广拉格朗日乘子法
输入:原始矩阵O,正值参数λ,α,β
输出:(P∗,Q∗,G∗)
初始化:Y0=sgn(O)/J(sgn(O)),k=0
While not converged Do

4 实 验
本文的实验是在配置为3.40GHz Intel(R)Core(TM)i7-2600 CPU、4GB RAM的主机上使用MATLAB R2014a进行的.
4.1 数据拟合实验
两组数值实验来比较ME-ALM,ALM和Dual算法在求解鲁棒性主成分分析时的运算精确度和奇异值分解的运行次数.
在本次试验中,设定准确解为矩阵(P0,Q0),其中,P0∈Rm×m,Q0∈Rm×m.通过计算矩阵U,VT的乘积UVT得到矩阵P0,而矩阵U和V都是m×r的实数矩阵,它们的元素值都满足均值为0.方差为1的高斯分布.接着可通过随机地从区间[-500,500]中取值作为矩阵Q0的非零元素值,从而产生稀疏矩阵Q0,最后求得矩阵P0与Q0的和矩阵O,并将O作为这两个算法的输入初始矩阵,同时记算法的输出为矩阵(^P,^Q).
本方法共做了两组对照实验,在其中一组实验中设定矩阵P0的秩rank(P0)=0.05m,而稀疏矩阵Q0的非零元素个数是0.05 m2,在另一组的实验中设定矩阵P0的秩rank(P0)=0.1m,稀疏矩阵Q0的非零元素个数是0.1 m2.此外在每一组实验中都使用维数为m的方阵(P0,Q0),而矩阵的维数m在每一组实验中都分别被设置为100、200、400和500,在每一种情况下都比较了ME-ALM,ALM和Dual算法的表现情况.使用来表征算法的运算精度并用算法的迭代次数代表奇异值分解的运行次数.数值拟合实验结果见表1中,可以看到,与ALM和Dual这两个算法相比,ME-ALM总是能经过较少次数的奇异值分解达到一个更小的值.这也就是说,与其它两个算法相比,ME-ALM总是能取得更好的运算精度.
4.2 人脸阴影的去除
在这个实验中使用鲁棒性主成分分析从受到不同光照影响的人脸图像中移除遮挡和阴影,这些人脸图像都是从人脸数据集YaleB中选取的.实验中分别使用本文方法(ME-ALM),ALM和Dual算法对相同的人脸图像矩阵进行处理,进而比较这3个算法剔除遮挡和阴影的效果.将每一幅人脸图像重新排列成为一个列向量,并将同一子集中的64幅图像重组为一个图像矩阵O,亦即O∈R32256×64,然后将矩阵O作为鲁棒性主成分分析的输入矩阵,分别使用上述3个算法进行处理,最后可得到两个输出矩阵,其中一个是人脸图像的低秩数据矩阵,另外一个则是稀疏噪声矩阵,分别将这两个矩阵记为P,Q.

表1 数值拟合实验
此外通过一组对照实验来比较G-ALM和ALM这两种算法在初始数据矩阵同时受到稀疏噪声和高斯噪声干扰时鲁棒性主成分分析模型的表现.在这组实验中将同一人脸图像集中的64幅图像重组为一个图像数据矩阵O′,即O′∈R32256×64.在此基础之上,将一个高斯噪声矩阵G∈R32256×64与图像矩阵O′相加得到矩阵O,O∈R32256×64,其中高斯噪声矩阵G的每一列都满足独立同分布的高斯分布N(0,10-6).然后将矩阵O作为上述两个算法的输入,最后可得到3个输出矩阵.一个是低秩数据矩阵P,一个是稀疏噪声矩阵Q(人脸中存在的阴影、遮挡),另一个是高斯噪声矩阵G.
在图1中展示了ME-ALM,ALM和Dual3个算法对同一幅人脸图像(在鼻子、眼睛和脸颊出受到阴影干扰)进行处理后的结果.图2展示G-ALM和ALM算法在去除人脸图像阴影的效果.
根据图1展示的实验结果,可发现ME-ALM算法可有效地完成去除人脸阴影的功能,可将人脸图像中的阴影遮挡等稀疏噪声去除.与ALM和Dual算法相比,在去除人脸阴影的过程中,ME-ALM算法具有更好的运算精度.而从图2的实验结果可看出G-ALM算法在人脸图像受到稀疏噪声和高斯噪声共同干扰时,也能很好地完成去除人脸阴影的任务,并将高斯噪声和稀疏噪声分别分离出去,进而避免低秩人脸图像和稀疏噪声图像受到高斯噪声的影响.而在相同的情况下ALM算法则不能很好地完成该任务.

图1 ME-ALM,ALM,Dual在人脸阴影去除效果上的对比

图2 G-ALM,ALM去除受高斯噪声干扰的人脸阴影的对比
4.3 动态前景的提取
运用ME-ALM和G-ALM算法实现从固定摄像头的视频序列中[15],把动态前景从静态背景中提取出来.将视频序列中几乎静止的背景当作鲁棒性主成分分析中的低秩部分,而将动态的前景看作稀疏噪声部分.
视频序列数据集Walk1拍摄于一个大厅,在视频序列中有一个人来回地走动.在实验中这个来回走动的人被看作是前景,而几乎静止不动的大厅则被看作是背景.这个视频序列总共由611帧视频图像构成,每一帧图像有384∗288个像素点.实验中随机选取180帧连续的视频图像并将每一幅图像重排为一个110 592∗1的列向量,然后将这180个列向量排列为一个视频数据矩阵O,即O∈R110592×180,将矩阵O作为ME-ALM算法的输入矩阵.经过ME-ALM算法处理后,可得到两个输出矩阵,其中一个代表低秩的静态背景,另一个代表稀疏的动态前景.
视频序列数据集EnterExitCrossingPaths2cor拍摄于一个走廊,在视频中有两个人在走廊中走动、相遇、然后离开.和Walk1数据集一样,从数据集中随机选取140帧连续的视频图像组成一个视频数据矩阵O.此外,为评估G-ALM算法在视频序列同时受到高斯噪声和稀疏噪声干扰时提取动态前景的性能,在视频数据矩阵O中加入一个满足高斯分布N(0,10-3)的高斯噪声矩阵G,得到一个新的视频数据矩阵O′,亦即O′∈R110592×180.将这个视频数据矩阵O′作为G-ALM算法的输入矩阵.经过GALM算法的处理之后,可得到3个输出矩阵,其中之一是代表背景的低秩矩阵,一个是代表前景的稀疏矩阵,另外一个是高斯噪声矩阵.
图3、4则分别展示了ME-ALM,ALM和Dual这3个算法在这两个数据集上的运行结果,第一列中的图像是随机取自视频中的一帧原始图像,此后从左到右的每一列分别是上述3个算法对该视频帧图像的处理结果,在每一列中从上至下依次是低秩视频帧(背景)、稀疏视频帧(前景)和稀疏视频帧的归一化结果.根据图3、4展示的实验结果可看出,图3中由一个走动的人代表的前景和图4中由两个走动的人代表的前景都被成功地从背景中提取出来.与ALM和Dual算法相比,ME-ALM算法表现出了更好的运算精度,可很好地实现从静态背景中提取动态前景.

图3 提取Walk1前景时的结果
有关G-ALM算法的实验结果将在图5、6中显示,其中图5展示了G-ALM算法的运行结果,每一列展示了G-ALM算法对一帧视频图像的处理结果,每一列中从上至下分别是原始视频帧、低秩视频帧(背景)、稀疏视频帧(前景)、稀疏视频帧的归一化结果和高斯噪声图像.图6展示了G-ALM和ALM这两个算法在相关数据集上的运行结果,第一列中的图像是随机取自视频中的一帧原始图像,此后每一列分别是上述两个算法对该视频帧的处理结果,在每一列中从上至下依次是低秩视频帧(背景)、稀疏视频帧(前景)、稀疏视频帧的归一化结果和高斯噪声图像.

图4 提取EnterExitCrossingPaths2cor前景时的处理结果

图5 G-ALM提取受高斯噪声干扰的前景
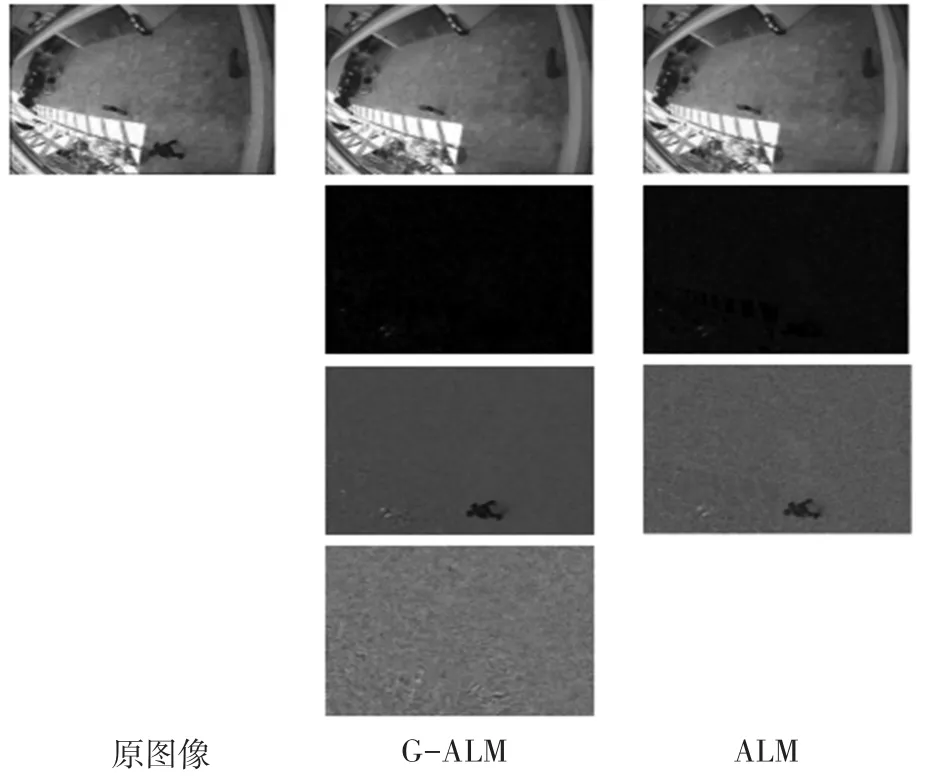
图6 提取受高斯噪声干扰图像前景时的结果
根据图5、6的实验结果可知,当视频序列同时受到高斯噪声和稀疏噪声干扰时,G-ALM算法可很好地实现从静态背景中提取动态前景,并清晰地将静态背景、动态前景和高斯噪声分别分离开来.与ALM算法相比,G-ALM算法可避免分离出的静态背景和动态前景受到高斯噪声的干扰.这也表明当数据同时受到稀疏噪声和高斯噪声的干扰,且低秩数据和稀疏噪声对图像处理都很重要时,G-ALM能够起到非常有效的作用.
5 结 语
本文提出两个改进的用于求解鲁棒性主成分分析问题的方法.其中ME-ALM方法通过求解鲁棒性主成分分析的对偶问题,赋予增广的拉格朗日乘子法一个最优的拉格朗日乘子,从而提高算法的运算精度.另一个改进是用来求解新的鲁棒性主成分分析的凸优化模型,本模型认为数据矩阵由低秩数据部分、稀疏噪声部分和高斯噪声部分3个部分构成.提出的G-ALM方法能够很好地求解这个新的优化模型,清晰地将高斯噪声和稀疏噪声分别从低秩数据中分离出来,进而提高数据对高斯噪声的鲁棒性.
通过去除人脸阴影和提取动态前景的实验对比,本文提出ME-ALM和G-ALM算法都取得了很好的效果,特别是在提取动态前景的应用中,当视频序列受到高斯噪声干扰时,G-ALM表现出其它凸优化算法所不具备的性能,可避免低秩数据和稀疏部分受到高斯噪声的干扰,而降低处理精度.
[1]MORRE B.Principal componentanalysis in linear systems:Controllability,observability,and model reduction[J]. Automatic Control,IEEE Transactions on,1981,26(1):17-32.
[2]CANDÈS E J,LI X,MA Y,et al.Robust principal component analysis?[J].Journal of the ACM(JACM),2011,58(3):1-32.
[3]TIPPING M E,BISHOP C M.Probabilistic principal component analysis[J].Journal of the Royal Statistical Society:Series B(Statistical Methodology),1999,61(3):611-622.
[4]DUONG T D X,NGUYEN H V.Some extension of sparse principal component analysis[J].International Journal of Machine Learning and Computing,2012(2):701-705.
[5]LIN Z,CHEN M,MA Y.The augmented lagrange multipliermethod for exact recovery of corrupted low-rank matrices[J].arXiv preprint arXiv:1009.5055,2010.
[6]DING X,HE L,CARIN L.Bayesian robust principal component analysis[J].Image Processing,IEEE Transactions on,2011,20(12):3419-3430.
[7]HE R,TAN T,WANG L.Robust recovery of corrupted low-rank matrix by implicit regularizers[J].Submitted to IEEE Trans on Pattern Analysis and Machine Intelligence(TPAMI),2014,36(4):770-783.
[8]ZHANG T,LERMAN G.A novel m-estimator for robust pca[J].The Journal ofMachine Learning Research,2014,15(1):749-808.
[9]BECK A,TEBOULLE M.A fast iterative shrinkagethresholding algorithm for linear inverse problems[J]. SIAM Journal on Imaging Sciences,2009,2(1):183-202.
[10]CHEN M,GANESH A,LIN Z,et al.Fast convex optimization algorithms for exact recovery of a corrupted low-rank matrix[J].In Intl.Workshop on Comp.Adv.in Multi-Sensor Adapt.Processing(CAMSAP),Aruba,Dutch Antilles,2009,61.
[11]WRIGHT J,GANESH A,PENG Y G,et al.Robust principal component analysis:exact recovery of Corrupted Low-Rank Matrices via Convex Optimization[J].Advances in Neural Information Processing Systems,2009,87(4):2080-2088.
[12]BAO B K,LIU G,XU C,etal.Inductive robust principal component analysis[J].Image Processing,IEEE Transactions on,2012,21(8):3794-3800.
[13]HE R,HU B G,ZHENG W S,et al.Robust principal component analysis based onmaximum correntropy criterion[J].Image Processing,IEEE Transactions on,2011,20(6):1485-1494.
[14]TOH K C,YUN S.An accelerated proximal gradient algorithm for nuclear norm regularized linear least squares problems[J].Pacific Journal of Optimization,2010,15(6):615-640.
[15]Bob Fisner.popular Image Analysis Datasers/Databases[DB/OL].20110512http://homepages.inf.ed.ac.uk/rbf/CAVIARDATA.
(编辑苗秀芝)
Robust principal com ponent analysis based on advanced augmented lagrangemultiplier method
YANG Jianzhe1,SUN Qiaoyu2,WANG Jun1,CHENG Dansong1,JIN Ye1,SHIDaming1
(1.School of Computer Science and Technology,Harbin Institute of Technology,150001 Harbin,China;2.School of Electronic Engineering,Huaihai Institute of Technology,222005 Lianyungang,Jiangsu,China)
To solve the problem that the calculation accuracy of the robust principal component analysis is reduced when the high dimensional data is disturbed by the sparse large noise and Gaussian noise at the same time,this paper proposes the advanced augmented Lagrangemultipliermethod for the robust principal component analysis.On one hand,we enhance the calculation accuracy by the advanced method which is based on the optimal initialization of the Lagrange multiplier.On the other hand we propose a dual noise convex optimization model for the robust principal component analysis.As the experimental results shown,the proposed advanced method provides an optimalmultiplier for the augmented Lagrange multiplier method and enhances the calculation accuracy of the method.Besides,the proposed dual noise model can separate the Gaussian noise and sparse noise from the data clearly and reinforces the robustness of the robust principal component analysis facing with dual noise.
robust principal component analysis,optimal initialization of Lagrangemultiplier,augmented Lagrange multipliermethod,novel convex optimization model,Gaussian component
TP391
:A
:0367-6234(2015)11-0027-07
10.11918/j.issn.0367-6234.2015.11.005
2014-12-11.
国家自然科学基金科学(61440025,61402133);国家博士后科学基金(20100480998);哈尔滨市科技创新人才专项资金(2013RFQXJ110).
杨剑哲(1991—),男,硕士研究生;石大明(1971—),男,教授,博士生导师.
程丹松,cdsinhit@hit.edu.cn.
