雷达维修保障系统效能的云重心评估*
2015-06-15王永攀杨江平邓凌云
王永攀,杨江平,王 敏,邓凌云
(1.空军预警学院,武汉 430019;2.解放军93897部队,西安 710077)
雷达维修保障系统效能的云重心评估*
王永攀1,杨江平1,王 敏1,邓凌云2
(1.空军预警学院,武汉 430019;2.解放军93897部队,西安 710077)
在雷达维修保障系统效能实际评估中,各项指标的参数通常以定性描述的形式来获得,模糊性和随机性较强。为了合理地处理模糊性、随机性以及定性描述与定量描述的关系,引入云重心评价法,提出一种基于多级云重心评价的雷达维修保障系统效能多级评估方法,得到了评估结果。该方法可以对各项指标进行优劣排序,评估结果较好地显示了当前系统效能的状态。
多级云重心评价,雷达,维修保障系统,效能评估
0 引言
在战时条件下,雷达维修保障系统效能直接影响雷达装备效能的发挥,因此,对雷达维修保障系统的效能进行合理、客观的评估,衡量雷达维修保障的能力水平,具有重要的意义。
雷达维修保障系统效能评估涉及多项指标、多种因素,且指标难以直接用精确的测试数据表示,不确定性和模糊性较强,评估方法的运用直接关系到评估结果的准确性和客观性。目前,可应用到装备维修保障系统效能评估的方法有很多[1-2]。但这些方法或者难以保证评估结果的客观性和准确性,或者评估结果有较强的主观性,难以保证客观、合理的评估结果。云重心评价法作为一种综合评估法是DMKD(Data Mine and Knowledge Discover)(数据挖掘和知识发现)中最新发展起来的,体现定性与定量之间的不确定性转换,能够实现定性属性和定量属性值之间的转换[3]。通过云模型把空间实体的模糊性和随机性集成到一起,为定性定量相结合的信息处理提供了有力工具。
基于此,本文提出一种基于多级云重心评价的方法对雷达维修保障系统效能进行综合评估。使得评估结果更好地体现出模糊性、随机性和不确定性。为雷达维修保障系统效能更加科学、合理、客观地分析提供了一种新的思路。
1 多级云重心评价法
云的数字特征可用(Ex,En,He)表示,其中:Ex是期望值,反映了相应模糊概念信息的中心值;En是熵,反映了定性概念的模糊度;He是超熵,反映了熵的离散程度[4]。为了说明问题,多级云重心评价方法的具体步骤如下[5-6]:
Step1确定评价因素集U
所谓因素集就是影响评价对象的各种因素组成的集合U={U1,U2,…,Um},元素Uj(j=1,2,…,m)代表影响评价对象的各种指标。通常在确定评价对象后,建立评价指标体系,构造合适的评价因素集U。
Step2确定各级指标的权重wi*
权重的确定方法有很多,如德尔菲法、层次分析法、PC-LINMAP耦合赋权法、环比法和区间估计法等。上述方法各有优劣,为了消除部分人为因素的影响,这里用赋权公式法确定权重[7]:
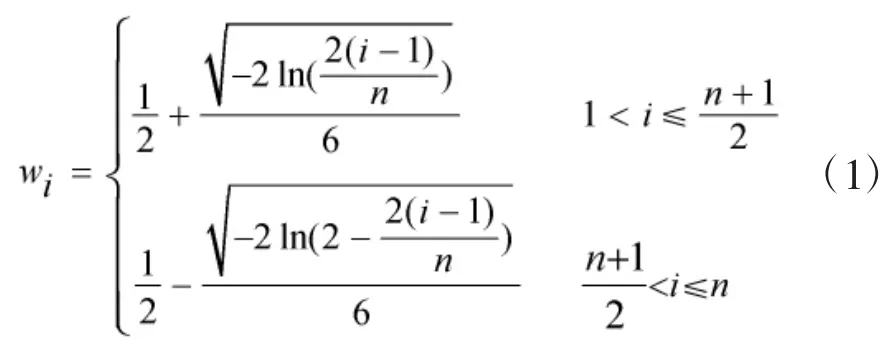
其中w1=1。式中:n为指标数,i为排队等级(排队等级是对指标按其重要程度所作的一个排列,不同指标同等重要也可处于同一等级)。进一步将wi作归一化处理即可得到权重wi*。
Step3确定评语集
所谓评价集是指评价者对评价对象可能做出的各种总的评价结果所组成的集合。评价集用V= {V1,V2,V3,V4,V5}表示,Vj(j=1,2,…,n)代表各种可能的总评价结果。
Step4一级云重心评价
(1)建立各项指标的云模型。在给出的系统评估指标体系中,提取n组样品组成决策矩阵,对于定性描述的数据,通过云模型转换为定量的n个云模型定量数据,那么指标可用一个云模型来表示。
其中:

其中,Exn为转换后的云模型数据,x=1,2,…,p为具体指标的下标,n为测试数据的组数;
(2)系统状态的表示。用一个p维综合云表示具有p个性能指标的系统状态p个性能指标可以用p个云模型来刻画,那么p个指标所反映的系统的状态就可以用一个p维综合云来表示。当p个指标所反映的系统的状态发生变化时,这个p维综合云的形状也发生变化,相应地它的重心就会改变。p维综合云的重心T用一个p维向量来表示,即T=(T1,T2,…,Tp),其中,Ti=ai×bi(i=1,2,…,p)。当系统的状态发生变化时,其重心变化为T'=(T'1,T'2,…,T'p);

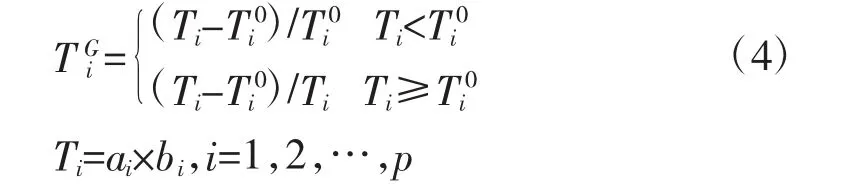
(4)经过归一化之后,表征系统状态的综合云重心向量均为有大小、有方向、无量纲的值(理想状态下为特殊情况,即向量为(0,0,…,0))。把各指标归一化之后的向量值乘以其权重值,再相加得到一级云重心评价的加权偏离度θ(0≤θ≤1)的值为:

式中,wi*为第i个单项指标的权重值。
Step5二级云重心评价
根据一级云重心评价得到的加权偏离度,建立单因素评价集θR=(θ1,θ2,…,θp),其中p为上一层次评价因素的个数。结合上一层次指标的权重W,得到二级云重心评价的总加权偏离度θθ:

最终,得到多级云重心评价的结果。
Step6确定评估等级
构造用云模型实现评测的评语集,将其置于连续的语言值标尺上,并且每个评语值都用云模型来实现,构成一个定性评测的云发生器,将加权偏离度输入评测云发生器,即可得出评价结果。
2 雷达维修保障系统效能评估
2.1 雷达维修保障系统效能评估指标体系
雷达维修保障的根本任务和目的是维修保障时间尽可能短,维修保障人员尽可能少,维修保障人员技能要求尽可能低,维修保障费用尽可能少及维修保障效果尽可能好,即以最小化的投入获得最大化的效果。本文从雷达维修保障系统的根本任务出发,综合考虑多种因素,遵循全面完整、简明科学、层次分明的原则,结合雷达保障工作实际,建立雷达维修保障系统二级效能评估指标体系如图1所示。
2.2 多级云重心评估
Step1确定评价因素集
根据建立的二级效能评估指标体系,建立相应的因素集如下:

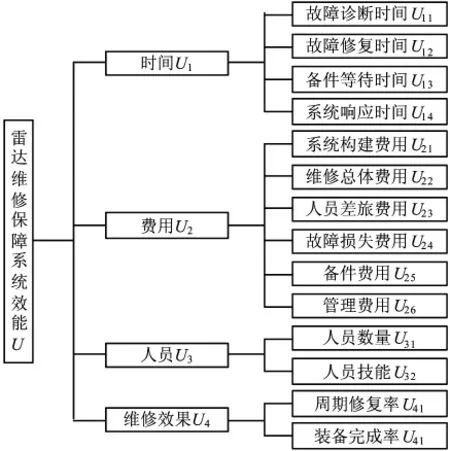
图1 雷达维修保障系统效能评估指标体系
Step2确定指标权重
通过专家打分法确定指标的排队等级,根据式(1)计算各指标权重。各指标的排队等级及权重值如表1所示。

表1 各指标的排队等级及权重
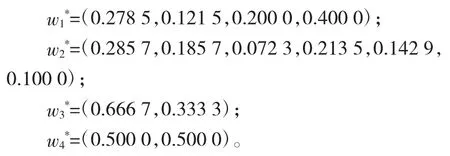
对表1中求得的各项指标的权重值进行归一化,从而得到各项指标的归一化权重值如下:
第2层次指标权重:

第3层次指标权重:
Step3确定评语集
根据评价者对雷达维修保障系统效能评估可能得到的各种结果,结合实际需求,建立5级评语集V={V1,V2,V3,V4,V5}={劣,差,中,良,优};通过Matlab仿真,将5个评语集置于连续的语言标尺上,将每个状态的语言描述用云模型来实现,从而构成一个定性评测的云发生器,如图2所示。
Step4一级云重心评价
限于文章篇幅,以指标U1为例来进行一级云重心评价。聘请10名专家对指标U1进行评定,评定结果如下页表2所示。
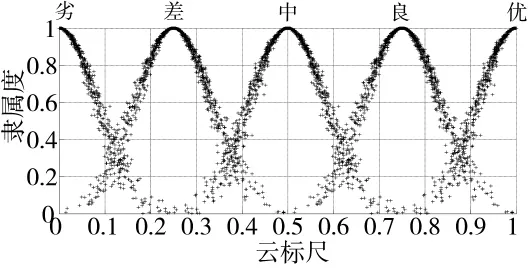
图2 评价集的隶属云
根据表2中专家对U1包含指标的定性评定结果,利用云模型将语言值用相应的3个特征值(Ex,En,He)来表征,并组成决策矩阵B。由B求得各项指标的Ex,En,如表3所示。
根据求得的期望及熵值,根据判断原则:期望不同,期望越大,指标越好;期望相同,熵值越小,指标越好。得知U1包含的各项指标专家评价的优劣顺序为:U12>U11>U13=U14。
依据云理论,由Ti=ai×bi=ai×wi*×0.371(i=1,2,…,p)可得:
四维加权综合云的重心向量为:


表2 指标U1专家评定结果
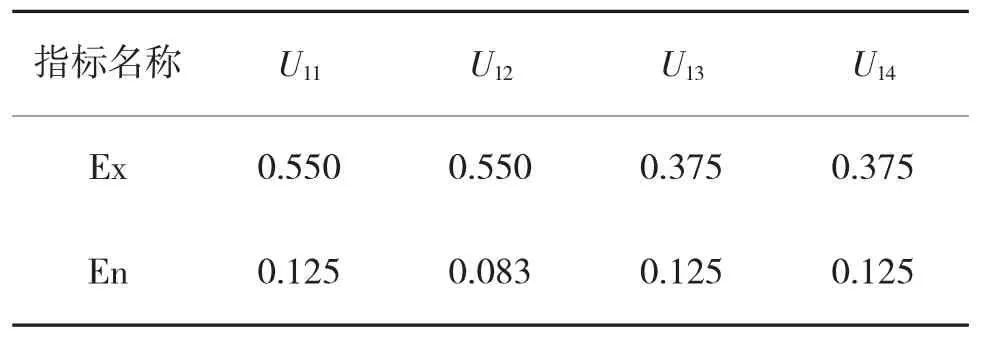
表3 各指标的期望值及熵值
理想状态四维加权综合云的重心向量为:T0=(0.103 3,0.045 1,0.074 2,0.148 4)。
由公式归一化后七维加权综合云的重心向量分别为:TG=(-0.450 1,-0.450 1,-0.625 3,-0.624 7);T0G=(0,0,0,0,0,0)。
由式(5)计算加权偏离度,得θ=-0.555 0,即距离最佳状态的偏离度为0.555 0,在云标尺上用刻度表示为:θ1=1-0.555 0=0.445 0。同理,可以求得指标U2、U3及U4包含的指标的期望值、熵值以及加权偏离度,如表4所示。
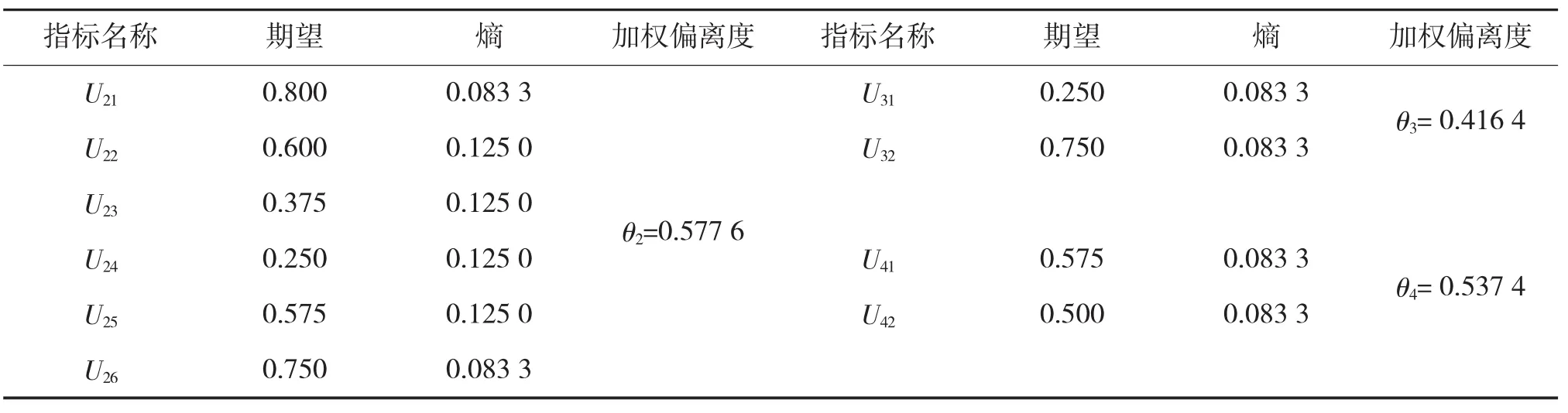
表4 其余各指标的期望值、熵值及加权偏离度
Step5二级云重心评价
根据计算得到的第二层次指标的加权偏离度,建立单因素评价集:

结合第二层次指标的权重W,得到二级云重心评价的总加权偏离度θθ=W·θR=0.515 4。
Step6确定评估等级
将各级计算得到的加权偏离度输入定性评测云发生器,在云标尺上,通过计算隶属度,得到最终评估结果如下:指标U1、U2、U3、U4的评估结果为“中”,且优劣顺序为U2>U4>U3>U2。最终评估对应“中”与“良”两个云对象,且隶属于“中”云对象的程度大于隶属于“良”云对象的程度。因此,该型雷达维修保障系统效能评估的结果为中。
3 结束语
本文对雷达维修保障系统效能评估问题进行了研究,提出一种基于云重心评价法的雷达维修保障系统效能多级评估方法,该方法较好地解决了指标定性与定量转化的关系,使评估结果更具模糊性、客观性和随机性。通过该方法对雷达维修保障系统效能的评估,对各项指标的优劣顺序进行了排序,比较清楚了反映了当前系统效能的状态,为改进雷达维修保障系统方案提供了理论依据。由于云模型具有普遍适用性,该方法具有推广性和普遍应用价值,从而为雷达装备的评估找到了一种新的思路。
[1]田军,张朋柱,王刊良,等.基于德尔菲法的专家意见集成模型研究[J].系统工程理论与实践,2004,62(1):57-69.
[2]田景文,高美娟.人工神经网络算法研究及应用[M].北京:北京理工大学出版社,2006.
[3]焦跃,李德毅.一种评价C3I系统效能的新方法[J].系统工程理论与实践,1998,56(12):68-73.
[4]李德毅,刘常昱.论正态云模型的普适性[J].中国工程科学,2004,6(8):28-34.
[5]焦利明,于伟,罗均平等.基于云重心评判法的指挥自动化系统效能评估[J].情报指挥控制系统与仿真技术,2005,27(5):71-74.
[6]齐伟伟,夏良华,李敏.基于云重心评估法的装备健康状态评估[J].火力与指挥控制,2012,37(4):79-82.
[7]焦利明,于伟,李冬岩.用赋权公式法对战术防空C3I系统综合效能评估[J].电光与控制,2006,13(8):34-38.
Efficiency Evaluation of Radar Maintenance Support System Based on CGCA
WANG Yong-pan1,YANG Jiang-ping1,WANG Min1,DENG Ling-yun2
(1.Air Force Early Warning Academy,Wuhan 430019,China;2.Unit 93897 of PLA,Xi’an 710077,China)
During the actual efficiency evaluation of radar maintenance support system,parameters of all indexes are always obtained by qualititative description,and this makes the indexes have a stronger fuzziness and randomness.To solve the problems among fuzziness,randomness,qualititative and quantitative description reasonably,this paper introduces Cloud Gravity Center Assessment(CGCA),and proposes a new method based on multi-CGCA to evaluate the efficiency of radar maintenance support system and obtains the evaluation result.This method ranked all of the indexes and shows the system is of better current states.
multi-cloud gravity center assessment,radar,maintenance support system,efficiency evaluation
TN95
A
1002-0640(2015)03-0056-04
2014-01-16
2014-03-22
“十二五”军内科研重点项目(KJ2011196)
王永攀(1987- ),男,河北保定人,博士研究生。研究方向:预警装备管理与保障。