有效飞机动力学转换对驾驶员诱发振荡影响*
2015-06-15要继斌胡金山
孟 捷,薄 涛,要继斌,胡金山
(复杂航空系统仿真重点实验室,北京 100076)
有效飞机动力学转换对驾驶员诱发振荡影响*
孟 捷,薄 涛,要继斌,胡金山
(复杂航空系统仿真重点实验室,北京 100076)
有效飞机动力学转换可能会导致人机闭环失稳,在特定条件下会引起驾驶员诱发振荡。针对此问题,分析了致使驾驶员诱发振荡发生的主要因素,构建了人机闭环系统模型,推导了人机闭环系统失稳数学模型。研究了引起有效飞机动力学转换的可能因素,并运用时域和频域分析技术对有效飞机动力学转换所产生的影响进行了分析。案例研究表明:有效飞机动力学转换后,在特定条件下可引发驾驶员诱发振荡,但由此引起的驾驶员诱发振荡可以采用相关方法进行抑制。在恰当的抑制方法作用下,由有效飞机动力学转换引发的驾驶员诱发振荡不会产生灾难性的后果。
飞行控制系统,飞行员诱发振荡,人机系统,有效飞机
0 引言
飞行员诱发振荡(Pilot Induced Oscillations,PIO)是一种不可控的严重人机耦合振荡事件,并已造成多起军用与商用飞机的等级飞行事故[1]。对飞行员诱发振荡现象进行系统深入的研究,摸清其发生的规律,对防止灾难性飞行员诱发振荡的发生有积极意义。
导致飞行员诱发振荡产生的因素有多种,例如有效飞机动力学、飞行员动力学行为模式、触发先导事件等。这些多样的因素中,飞行员响应模式的多样性、过大的滞后时间、不合适的有效飞机动力学增益、飞行员动力学或有效飞机动力学的转换是造成严重驾驶员诱发振荡诸多因素中的关键要素。
多样的飞行员动力学行为模式对驾驶员诱发振荡发生将会产生影响,见文献[2-6]。本文将研究的重点置于有效飞机动力学转换与驾驶员诱发振荡发生的关系上,力图寻求具有普遍意义的结论。同时,尝试对由有效飞机动力学转换引发的驾驶员诱发振荡现象的抑制方法进行初步探索。
1 人机闭环系统数学模型
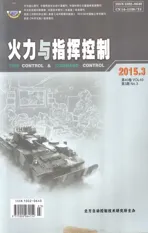
简化的人机闭环系统数学模型,如图1所示,i为系统输入信号,e为系统误差信号,c为飞行员输出信号,m为系统输出信号,YP为飞行员描述函数模型,Yc为飞机描述函数模型。一般而言,驾驶员诱发振荡的发生不是随机的,而是需要具备一定条件的。前人的研究成果表明驾驶员诱发振荡的产生一般具有3个条件,这3个条件分别是有效飞机动力学缺陷、触发因素和闭环操纵[7]。
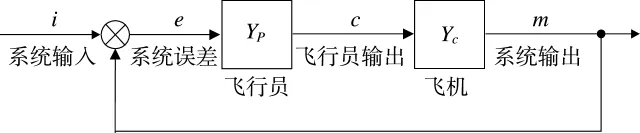
图1 简化的人机闭环系统数学模型
实践表明,线性增稳飞机的动力学特性经常是引起发散驾驶员诱发振荡的原因。对现代先进电传飞机来说,有效飞机动力学缺陷通常是指由控制系统高阶特性和非线性特性造成的高频相位跌落,使人机开环系统相位滞后接近或超过-180°,此时人机开环系统的相位储备为零或负值。该条件是引起人机闭环系统失稳的关键条件。
触发因素一般是难以确定的随机因素,使驾驶员的控制策略与被控制的有效飞机动力学特性之间失谐。常见的触发因素有:环境、飞机和驾驶员等3类触发因素。环境触发因素:它以多种方式激起飞行事故的发生,最直接方式就是环境条件干扰驾驶员操纵,如飞行中遇到的大气紊流,一方面会增加飞机的扰动,另外还会增加驾驶员紧张程度,使驾驶员以高增益操纵飞机,从而导致飞行事故的发生。飞机触发因素:最常见的是有效飞机动力学特征中能引起操纵失谐的各种变化,例如操纵系统故障、飞行控制模态转换不平稳、飞行控制系统调节随飞机构型变化设计不合理等。驾驶员触发因素:通常环境触发作用或飞机触发作用都先于驾驶员触发作用,而不稳定事件均是由于驾驶员反应不正确或反应过度所致的。在危急形势下,驾驶员的精力会集中于完成某一特定的感示下而无暇它顾,这种精力过分专注情况称之为“隧道效应”。由于情绪紧张,驾驶员的操纵增益往往增至过大,而发生驾驶员触发现象。
由于驾驶员诱发振荡是人机闭环不稳定振荡,故闭环操纵是其主观条件。多数由驾驶员诱发振荡导致的飞行事故与着陆有关。此外,还有空中加油、密集编队飞行、地形追踪、精确进场、定点着陆、湍流中着陆和空中跟踪等较高增益操纵的闭环飞行任务等。
当上述3个条件同时存在时,飞机才会发生低频或高频驾驶员诱发振荡。只有当闭环振荡频率在1 Hz附近时,才会发生严重的或灾难性的驾驶员诱发振荡。通过上述分析人机闭环系统失稳的条件可用数学模型描述为:

2 有效飞机动力学转换影响案例研究
在现代先进飞机中有效飞机动力学转换与多个因素相关联,目前对该问题的分析还没有一种通用的方法,也没有一个具有普遍意义的数学描述方式。飞行控制系统构型的改变会导致有效飞机动力学的转换。飞行员大幅值操纵命令同样可导致有效飞机动力学转换。为了充分说明该问题,本文将对3个有效飞机动力学转换的典型案例进行研究。通过案例来说明有效飞机动力学转换对驾驶员诱发振荡发生所产生的影响。同时,对与有效飞机动力学转换引发驾驶员诱发振荡的抑制方法进行了初步研究。
2.1 案例1研究
案例1将对美国YF-12飞机大幅值驾驶员诱发振荡产生原因进行研究。该驾驶员诱发振荡是由YF-12飞机配平开关故障而触发。配平开关故障导致YF-12飞机在近进加油机准备空中加油时,纵向配平超调。飞行员对配平超限立即作出反应,以过猛的修正动作以保持飞机不超过机体过载限制,在这一持续调节过程中遭遇驾驶员诱发振荡。图2是该驾驶员诱发振荡过载在±2 g范围内的时间历程图[8]。
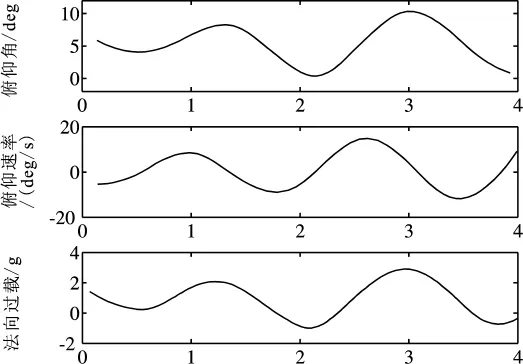
图2 YF-12飞机PIO时间历程曲线
YF-12飞机的有效纵向动力学特性的构成如图3所示。该型飞机的增稳系统是一个限制权限的俯仰阻尼器。该阻尼器平尾后缘上偏最大偏度为2.5°,平尾后缘下偏最大偏度为6.5°,速率限制为12.6°/s。控制增稳系统是一个反馈回路,描述函数和分别表示速率限制和位置限制。
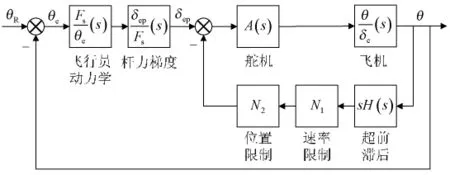
图3 YF-12飞机纵向控制系统框图
在驾驶员诱发振荡过程中,非线性环节的描述函数由正弦输入描述函数获得。非线性环节作用时的幅值和相位曲线分别如图4和图5所示。由图2注意到驾驶员诱发振荡频率近似为3.14 rad/s。在此频率点处,两种不同位置限制的幅值特性差异非常小,这就意味着在该频点处速率限制是最主要的驾驶员诱发振荡触发因素。非线性因素改变了有效飞机的动力学特性,对系统稳定性有显著不良影响,增大幅值比,增加了系统相位滞后。
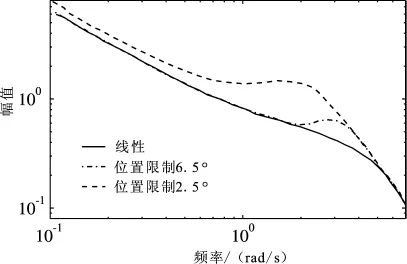
图4 YF-12飞机幅值比曲线
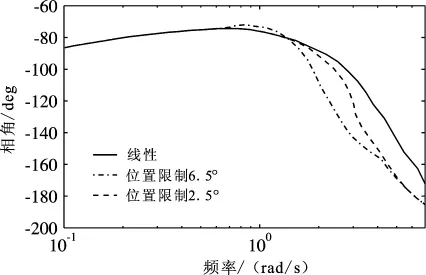
图5 YF-12飞机相角曲线
经深入研究发现YF-12飞机发生的驾驶员诱发振荡事件是由有效飞机动力学短周期阻尼比的转换而引起,且该阻尼比是飞行员输入幅值的函数。由控制系统非线性引起的动力学改变,将维持一个持续驾驶员诱发振荡的驾驶员增益值减小了50%以上,这样就使得紧张状态下的飞行员大幅值操纵成为了直接触发因素。通过上述案例的分析,可发现该案例具备了有效飞机动力学、触发因素、紧急任务中的闭环操纵等3个导致驾驶员诱发振荡的主要因素。若要抑制此类PIO的发生,可通过减少驾驶员的增益值或对速率限制进行相应补偿。
2.2 案例2研究
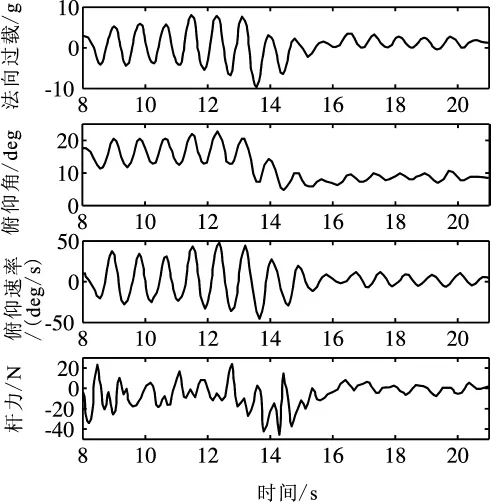
图6 T-38教练机驾驶员诱发振荡时间历程
另一个典型的由飞机动力学转换导致的驾驶员诱发振荡案例是美国T-38教练机发生的一次驾驶员诱发振荡。该事件是驾驶员诱发振荡研究史上的一次里程碑事件,由于飞机上有精良的设备,该驾驶员诱发振荡过程获得了良好地记录。图6绘制了T-38教练机驾驶员诱发振荡过程中的飞行轨迹[9]。该轨迹表明初始时,具有控制增稳系统的飞机俯仰轴遭遇到高频低幅值振荡。驾驶员诱发振荡开始后,飞行员断开了俯仰增稳器,并试图控制飞机使之恢复常态。一个周期为7.4 rad/s的驾驶员诱发振荡快速发展,在一个周期内飞机法向过载的峰值差值达到了10 g。
通过地面仿真和分析,发现有效飞机动力学和飞行员动力学特性的变换是导致此次驾驶员诱发振荡的主要因素。有效飞机动力学在增稳器通断前后首先发生变换。并且即使增稳器关断后,飞机有效动力学特性仍然出现了两种情况。
飞机飞行控制系统加入了人感系统和有效配重,其目的是改善杆力特性。T-38是教练机有前后两个机舱,前后舱间的控制是相连接的。几个不均衡质量分布于机械控制系统,包括一个集中配重。控制系统的有效配重是上述全部配重的复合,它改变了相互连接控制杆的配平位置。有效配重不仅改变了稳态驾驶杆力,同时在控制系统中创造了一个机械反馈回路。飞行员所面对的实际飞机动力学特性取决于控制系统的摩擦力、弹性、配重、配重位置处的加速度及飞行员杆力水平。
下页图7构建了一个有配重和无配重情况下的T-38教练机有效飞机动力学模型。图8描述了有配重和无配重限制条件下的俯仰杆力频域特性。有配重时,飞行员操纵幅值较大;无配重时,飞行员操纵幅值与系统摩擦力水平相当。由图8可知配重减小了飞机低频增益值。在短周期频率范围内,配重反馈回路增加了有效短周期频率,同时减小了阻尼比,使谐振峰值出现显著改变。这一显著影响使得闭环系统中性稳定频率处的最大飞行员增益值发生剧烈变化,无配重反馈时的值是有配重反馈时的4倍。因此,在突发情况下,飞行员需要高度的非线性适应能力,使其增益值产生大幅度的非线性变换,以适应飞机动力学特性的突然改变。
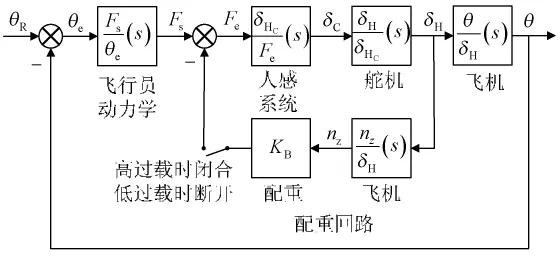
图7 T-38主控制系统框图
一般而言,飞行员初始状态适应增稳系统开启的飞机动力学。接着断开增稳系统,飞行员接过飞机控制权,此时飞机动力学从有配重模态迅速过渡至无配重模态。开始时飞行员用于适应这一转变的增益值过大。当控制增稳系统再次接通,配重接入控制系统时,便会导致PIO出现。在完全发展的PIO中,飞行员将运用同步控制行为,传递函数特性近似一个纯增益。当飞行员逐渐减小控制增益值,恢复对飞行情况的掌握,PIO将逐渐被抑制。
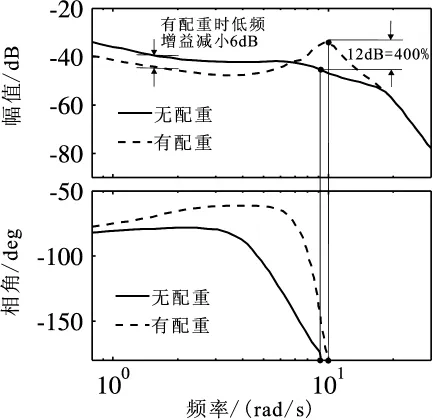
图8 配重对飞机俯仰响应的影响
通过对该案例的研究,对合适的PIO抑制方法能有一个深刻的认识。一般而言,飞行员可以采取松杆或握杆操作,飞机振荡运动将逐渐衰减。但两种方法所产生的飞机有效阻尼比是不同的。对飞行员松杆的情况,有效飞机动力学将受到控制系统配重的影响,飞机有效短周期阻尼比约为0.1。对飞行员握杆的情况,飞机有效短周期阻尼比约为0.4。因此,对该人机系统构型而言,采用握杆是明智选择。
2.3 案例3研究
1978年,美国DFBW F-8飞机进行了一系列飞行员高度参与且高强度的飞行实验任务,这些飞行任务包括近进、接地与复飞。在飞机接地时,DFBW F-8有效飞机动力学特性会自动转换。其有效飞机动力学转换的原因是飞机起落架开关切断了增稳系统中的法向加速度反馈和前向回路积分器,使杆力梯度移动到高值区。美国DFBW F-8飞机飞行控制系统构型改变,使飞行员需要面对有效飞机动力学短周期模态的两种不同形式。由于该过程具备了驾驶员诱发振荡产生的3个主要因素,因此,发生了驾驶员诱发振荡。美国DFBW F-8飞机驾驶员诱发振荡的时间历程曲线如图9所示[10]。
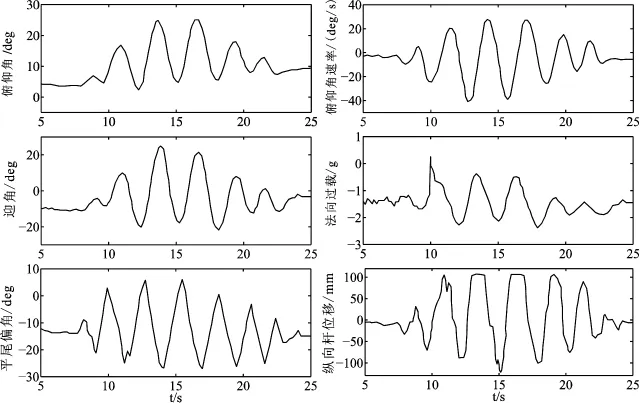
图9 DFBW F-8飞机驾驶员诱发振荡时间历程
通过以上3个案例的研究,可以发现有效飞机动力学转换时,可使人机系统具备发生驾驶员诱发振荡的3个最主要因素,因此,可能会导致驾驶员诱发振荡的发生。但由有效飞机动力学转换引起的驾驶员诱发振荡是可以抑制的,只要飞行员处理及时得当,有效减小驾驶员增益值至合理水平,往往不会导致灾难性的飞行事故发生。上述案例也表明由有效飞机动力学转换引发的驾驶员诱发振荡是可防可控的。
3 结束语
通过对人机闭环系统建模和人机闭环系统失稳条件的研究,发现驾驶员诱发振荡的发生一般需要具备3个要素,即有效飞机动力学缺陷、触发因素、闭环操纵。当人机开环系统相位滞后接近或超过-180°,人机开环系统的相位储备为零或负值时,就极有可能发生驾驶员诱发振荡。人机系统中控制系统的构型改变是致使有效飞机动力学变换的主因。有效飞机动力学变换并不会必然导致驾驶员诱发振荡的产生,只有同时满足驾驶员诱发振荡发生的条件时,驾驶员诱发振荡才会发生。
通过对由有效飞机动力学变换引起的驾驶员诱发振荡3个典型案例的深入分析,可知由有效飞机动力学变换引起的驾驶员诱发振荡是有方法抑制的。方法1:减小驾驶员的操纵幅度或握杆,减小人机系统中驾驶员增益值至合适水平,改变人机开环系统幅相曲线形状,使得人机开环系统相位滞后不再接近或超过-180°,而处于一个合理水平;方法2:在飞行控制系统设计阶段,使两种飞行控制系统构型间能有较为缓和的过度,能使飞行员及时适应有效飞机动力学的变化,并且对位置限制和速率限制饱和等非线性情况进行补偿。
[1]McRuer,Duane T.Aviation Safety and Pilot Control,Understanding and Preventing Unfavorable Pilot-vehicle Interactions[M].Washington D.C.:National Academy Press,1997.
[2]孟捷,徐浩军,武卫.驾驶员模型对Ⅱ型PIO预测影响研究[J].系统仿真学报,2009,21(12):3816-3819.
[3]方振平,吴屹东.现代飞机驾驶员诱发振荡机理和预测研究[J].飞行力学,1997,15(3):48-54.
[4]高庆玉,方振平.操纵系统非线性因素对飞机纵向驾驶员诱发振荡影响的探讨[J].航空学报,2000,21(1):21-24.
[5]孟捷,徐浩军,刘东亮.基于描述函数法的速率限制环节特性研究[J].飞行力学,2009,27(2):20-23.
[6]孟捷,徐浩军,张建康.II型PIO反馈与前馈抑制系统对比[J].航空学报,2010,31(9):1701-1707.
[7]高金源,李陆豫,冯亚昌等.飞机飞行品质[M].北京:国防工业出版社,2003.
[8]Smith J W,Donald T.Berry.Analysis of Longitudinal Pilot-induced Oscillation Tendencies of YF-12 aircraft[R],NASA TN D-7900,1975.
[9]Smith R H.A Theory for Longitudinal Short-period June Pilot-induced Oscillations[R],AFFDL-TR-77-57,1977.
[10]Berry D T,Bruce G P,Kenneth J S,et al.In-flight Evaluation of Control System Pure Time Delays[J],Journal of Aircraft,1982,19(4):318-323.
Influence of Effective Vehicle Dynamics Transitions on Pilot Induced Oscillations
MENG Jie,BO Tao,YAO Ji-bin,HU Jin-shan
(Science and Technology on Complex Aviation Systems Simulation Laboratory,Beijing 100076,China)
The instability of aircraft-pilot system can be caused by effective vehicle dynamics transitions.The pilot induced oscillations may be introduced by effective vehicle dynamics transitions in given condition.To resolve the problem,the main factors which closely connected with pilot induced oscillations are analyzed.The model of closed-loop aircraft-pilot system is built.The mathematical model of closed-loop aircraft-pilot system instability is derived.The complication which may induce effective vehicle dynamics transitions is studied.The impact of effective vehicle dynamics transitions was analyzed by time and frequency domain technology.The case investigation prove that the pilot induced oscillations may be occur on condition that effective vehicle dynamics transformed in special instance,but it can be suppressed by given methods.If the preventing measure can work correctly,the pilot induced oscillations which are caused by effective vehicle dynamics transitions could not induce catastrophic flight accident.
flight control systems,pilot induced oscillations,pilot-vehicle system,effective vehicle
V212.1
A
1002-0640(2015)03-0016-04
2014-01-09
2014-03-17
国家自然科学基金资助项目(61374145)
孟 捷(1982- ),男,湖南沅陵人,博士后。研究方向:飞行控制与飞行仿真。