并联型有源滤波器无谐波电流检测的矢量控制
2015-06-10郭攀锋李欣
郭攀锋,李欣
(三峡大学电气与新能源学院,湖北宜昌443002)
目前,APF 的常规控制策略为:先通过谐波检测检测出谐波电流指令,然后进行电流闭环电流跟踪控制,使有源电力滤波器输出电流与谐波电流互补,从而抵消电网谐波电流,达到谐波抑制的目的。按照这种控制思路,有源电力滤波器的首要任务就是要精确快速地检测出负载电流中的谐波分量,这一点关系着APF最终补偿谐波的效果,此过程往往需要采集较多的模拟信号、A/D 转换和大量的计算,对信号的采集和处理都要求有较高的精度和实时性,否则将严重影响其补偿效果。谐波电流的检测似乎是谐波补偿中必不可少的环节。
本文在APF 常规控制算法等效演化变换的基础上,论证了APF谐波检测环节存在的不必要性及无谐波检测环节的优越性,提出了一种无谐波检测环节的控制方法。
1 APF控制模型及控制策略
1.1 APF的控制数学模型
有源滤波器的主电路与PWM 整流电路类似,都采用了三相桥式电路,由6 个IGBT 构成3个桥臂,通过控制这6个IGBT的开关来达到控制目标。针对APF的控制目标为,补偿由非线性负载所产生的谐波分量,使其不对电网产生污染,同时提供APF直流电容所产生的有功损耗,这个过程中APF变换器既有整流工作又有逆变工作,两种状态是共存的。故若要有针对性的进行控制,必须先进行APF 数学模型的分析[1]。APF 的拓扑结构如图1所示。
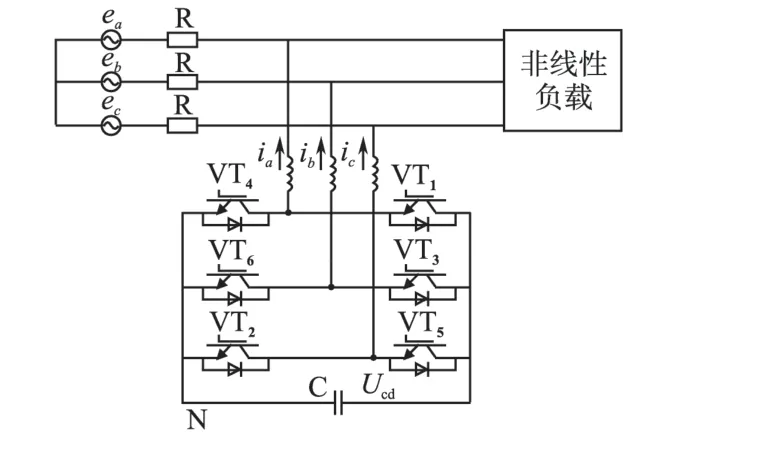
图1 两电平有源滤波器拓扑结构图Fig.1 The topology structure of two-level active filter
根据APF 的拓扑结构建立数学模型,经过Clark变换及Park变换可以得到APF在旋转坐标系下的数学模型如下式[2]:

式中:icD,icQ分别为有源滤波器的有功和无功电流;ed,eq分别为进线电压在d,q 坐标轴的分量;L为有源滤波器进线电抗;R为进线等效电阻;C为直流母线侧电容;udc为直流侧母线电压。
1.2 无谐波电流检测控制策略
APF 的动态响应速度的提高程度取决于检测算法的优化,但只要谐波检测环节存在就很难避免检测的延迟与误差,影响谐波补偿效果[3]。当APF 直流侧电压保持不变时,交、直流侧没有有功功率的交换,即APF三相输出电流的有功分量为0(忽略线路及功率变换器损耗),因此有等式如下:

其中,iLaP,iLbP,iLcP为负载实际基波有功分量,如果检测基波有功电流存在误差,即:
此时,电压环PI调节器的输出就会自动调整输出值,最终使式成立,保证有功电流的平衡。假设最极端的情况,即检测出来的基波有功电流iaf,ibf,icf=0时,APF电压调节器的输出仍然不断调节,最终满足下式:
这表明,由于电压环PI 调节器的作用,控制系统会自动对基波有功电流的检测误差自动调整补偿回去。根据上述极端情况iaf,ibf,icf=0 的论述,完全可以把有功电流检测环节去掉,从而构建出APF 在abc三相坐标系上基于电流滞环控制器的无谐波检测环节控制方案,如图2所示。
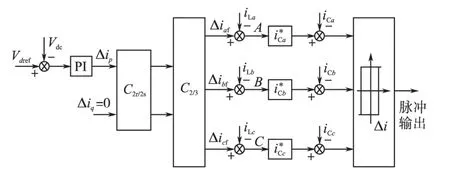
图2 dq坐标系下的APF无谐波检测控制框图Fig.2 The control diagram of the no harmonic detection for APF under dq coordinate system
图2 中的A,B,C 3 点代表负载电流注入该APF 系统的3 个结点,直流侧电压控制器的输出电流值代表电网侧的三相电流的期望值,是基波有功电流。此时,无谐波检测环节APF的控制思想本质上就是功率变换器直流侧电容电压稳定控制与非线性负载电流前馈组成的复合控制策略[5]。
根据上述dq 坐标系互相耦合的APF 数学模型,构建出三电平APF 在dq 坐标系上基于SVPWM调制控制的无谐波检测环节控制框图,如图3所示,iLd,iLq是负载电流,icd,icq是APF 输出电流的dq坐标轴分量为期望补偿后网侧电流在d-q 轴的分量(即基波有功电流)。

图3 基于dq轴坐标系的APF无谐波检测环节解耦控制框图Fig.3 Decoupling control block diagram of no harmonic detection link based on the dq axis coordinate system of the APF
图3 中对APF 双闭环系统进行了电网电压前馈及电流反馈解耦,APF交流侧电感及电阻两端电压是电流环的PI调节器输出的期望值,由于已经进行了解耦控制,此时的PI输出量只由前端的输入决定,不受其他因素干扰。在这个系统中,由于需要单位功率因数运行,即除补偿的谐波无功电流外不产生额外的无功电流,故无功给定,则给定无功电流为负载无功电流iLq,经过PI 调节器后的量加入解耦量后得到SVPWM的q 轴的控制信号uq。同时,整个系统需要一定的能量维持运行,反映到直流母线电压需要稳定,故在补偿谐波有功电流后还需要额外产生一定的有功电流,该有功电流由给定直流母线电压与反馈量通过PI 调节器得到。与iLd共同构成了APF控制系统中有功电流的给定,经过PI调节器后的量加入解耦量后得到SVPWM的d轴的控制信号ud。
2 实验验证分析
有源滤波器系统实验框图如图4 所示,其中三相电源为非理想电源,负载为不控整流桥阻感负载,其实验参数如表1所示。

图4 有源滤波器系统实验框图Fig.4 Diagram of the active filter system experiment
表1 实验参数Tab.1 Parameters of experiment
补偿前负载侧电流如图5a所示;补偿后的电源电流如图5b 所示。对比补偿前后的电流可以看出来,负载电流产生的谐波得到了有效的抑制和补偿。
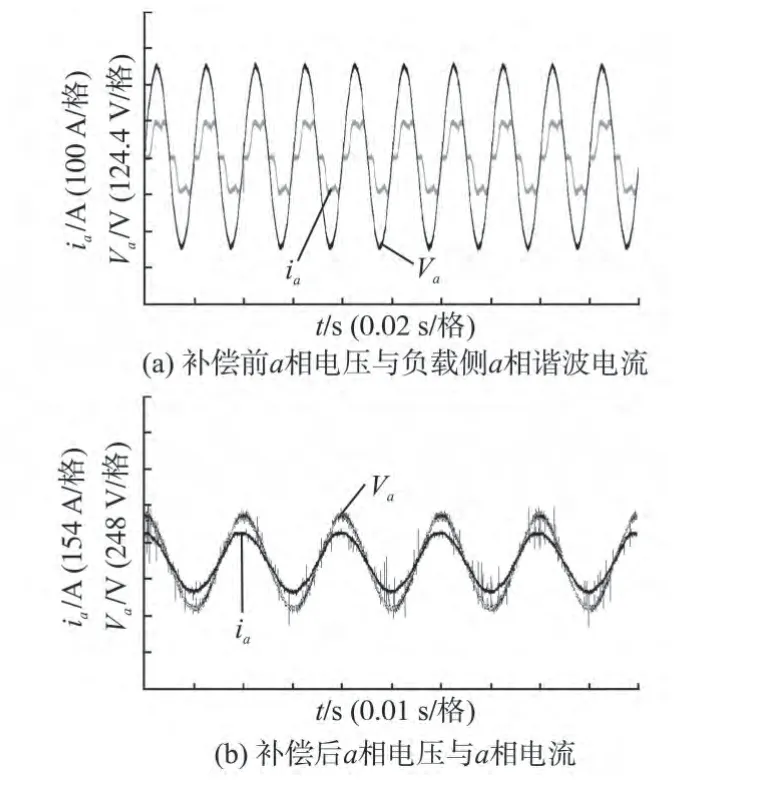
图5 补偿前后电压与电流波形Fig.5 The voltage and current waveforms before and after the compensation
根据实验结果可以看出,在加入APF滤波器之前输入到电网上的电流波形存在很大的谐波,而在并联APF后对电网电流起到了明显的改善,将谐波滤除达到了电网所要求的THD,且补偿后电网电流畸变率降至4.2%。
3 结论
本文通过对谐波检测原理的分析,结合三相并联型有源滤波器的数学模型,提出了一种无谐波电流检测的矢量控制方法。最后,通过搭建实验用主电路进行了实验验证。实验结果表明,本文所提出的控制方法的正确性和可行性。
[1] 王久和,李华德,王立明,等.电压型PWM 整流器直接功率控制系统[J].中国电机工程学报,2006,26(18):54-60.
[2] 赵张飞,陈国振,任亚军,等.三相并联型有源电力滤波器定频直接功率控制[J].电力电子技术,2013,47(10):57-59.
[3] 王兆安,杨君.谐波抑制和无功功率补偿[M].北京:机械工业出版社,2006.
[4] 黄崇鑫,王奔,邹超,等.并联有源电力滤波器新型控制策略仿真研究[J].电力系统保护与控制,2009,37(5):52-55.
[5] 王广柱.并联型有源电力滤波器电流控制的等效原理[J].中国电机工程学报,2006,26(15):40-46.
