颜色特征模型在静态车辆检测中的应用
2015-06-07张力邓亚航饶小李
张力,邓亚航,饶小李
昆明理工大学信息工程与自动化学院,云南 昆明 650500
颜色特征模型在静态车辆检测中的应用
张力,邓亚航,饶小李
昆明理工大学信息工程与自动化学院,云南 昆明 650500
为了解决智能交通中的静态车辆检测准确率不高的问题,提出一种基于颜色特征的车辆目标检测方法.该方法首先根据Hough变换分割出路面感兴趣区域,利用颜色特征空间降维建立理想的颜色特征模型;其次,根据贝叶斯分类器进行路面与车辆的像素分类;最后,由最小割/最大流算法进行车辆目标分离.在实景采集交通视频图像后对文中提出方法和现存方法进行了对比评估.基于颜色特征的车辆目标检测方法对于静态车辆目标的检测准确率达到了63.05%,误检率降低至21.27%,漏检率降低至24.01%.与传统方法相比,该方法能更快、更准确地检测到目标.
静态车辆检测;颜色特征;车辆目标分离
0 引言
随着智能交通的发展,车辆检测技术在智能交通系统中的作用日益突出.因此,如何简单、有效地从道路中检测出车辆目标,是一个亟需解决的问题.随着计算机视觉技术的发展,基于视频的车辆检测方法由于其信息采集量较大、检测区域广、不妨碍交通等优点,因此正成为目前的研究重点.
针对基于视频的车辆检测方法, Z.Zivkovic[1]提出了基于运动信息的背景建模,通过建立场景背景模型,通过对背景模型做背景差分提出车辆目标;C.Luo[2]提出了基于路面先验知识建模,利用红绿蓝(Red-Green-Blue,以下简称:RGB)颜色、轮廓等特征建模对车辆进行识别;X.Wang[3]提出了基于小波变换的车辆检测方法;还有经典的时间平均法[4](Time-Average Method,以下简称:TAM)和高斯混合模型法[5](Gaussian Mixture Model,以下简称:GMM),然而这些方法大多数都只能处理路面背景中的动态车辆,当检测静态车辆目标时,容易将静态车辆目标混入到图像背景中.
笔者提出一种基于颜色特征的车辆目标检测方法,该方法能有效检测携带静态车辆的动态场景中的车辆目标.该方法通过建立理想的路面颜色特征模型,利用贝叶斯分类器分类车辆和路面像素,从而在路面背景中分割出车辆目标.通过实验表明,该方法与其他方法相比,能够更有效的检测出静态车辆目标.
1 Hough变换与路面感兴趣区域分割
1.1 路面感兴趣区域分割
在本文的研究场景中,笔者所关注的感兴趣区域(Region Of Interest,以下简称:ROI)是车辆行驶的路面区域.通过划分路面ROI,不仅能使后续车辆检测的计算负荷和复杂度降低,同时也提高了计算精确度.在分割完成的路面ROI中,仅存在车辆和路面这两种对象标识.假设路面无其他杂物污染时,车辆与路面的像素集合是对立且互补的.
1.2 路面ROI分割步骤
路面ROI分割分三步进行:第一步,采用Canny算子生成边缘图像,以此作为Hough变换的二值图像;第二步,利用Hough变换提取场景中可能存在的车道线或围栏等ROI路面边缘直线;第三步,调节阀值k过滤掉非ROI路面边缘直线,从场景中分割出ROI路面.
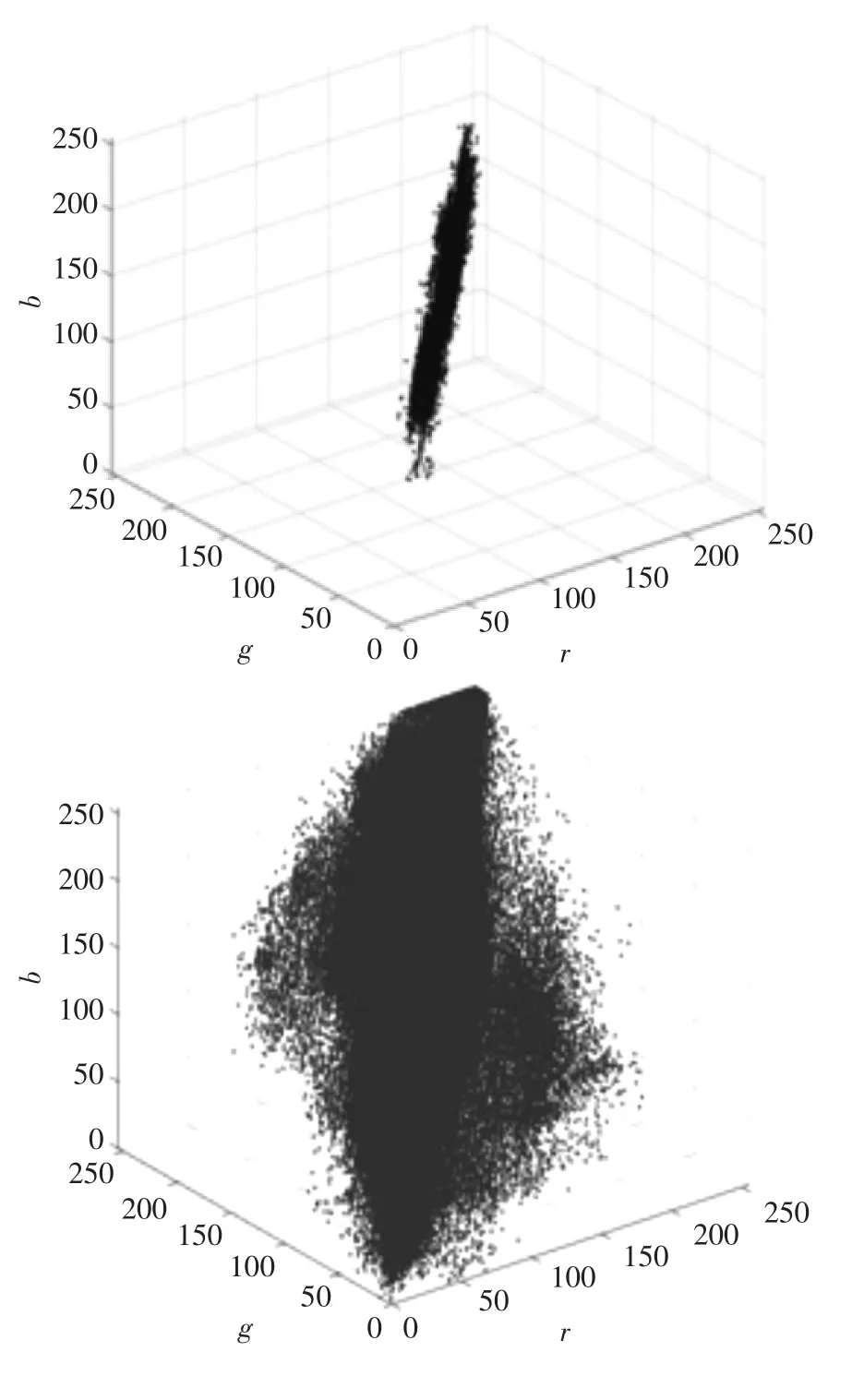
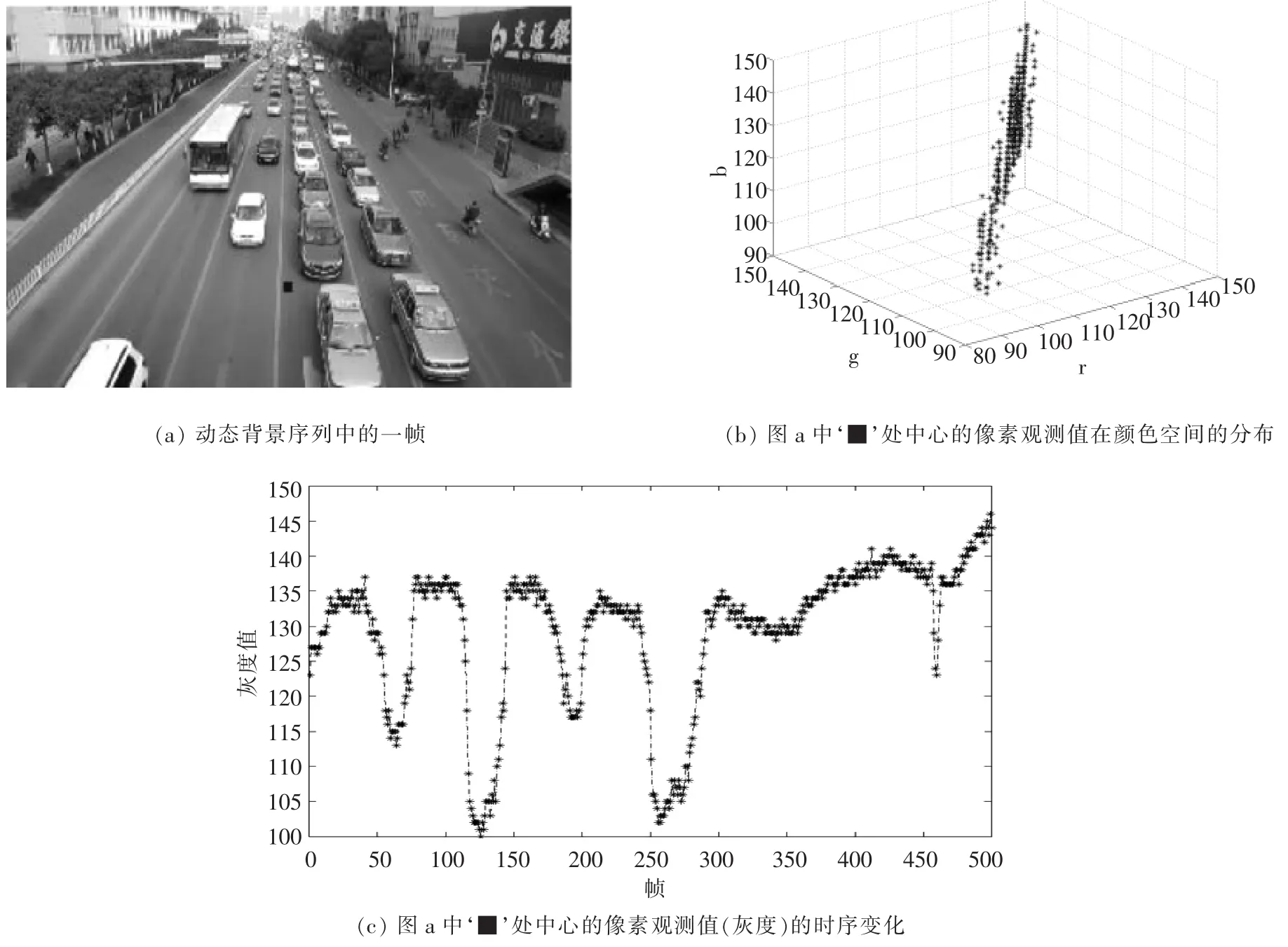
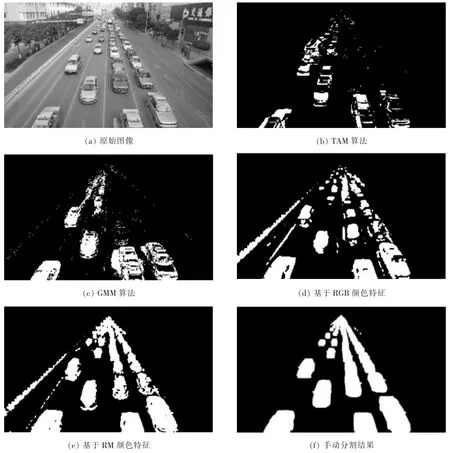
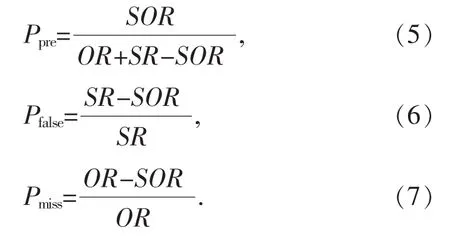
大量直线被Hough变换在Canny处理的边缘轮廓图像中检测出来,然而这些直线中存在大量非边缘直线.设一条直线的斜率为阀值k,通过控制阀值k,例如设定1/2 2.1 颜色特征空间建模 笔者搜集了N幅来自城市交通场景的路面和车辆图像.通过统计分析,可以从这N副图像中得到R,G,B颜色分布的协方差矩阵∑.利用Karhunen-Loève变换[2,6],求得协方差矩阵∑的特征向量ei与特征值λi,其中i=1,2,3.因此,RGB颜色空间可转换为颜色特征空间Ci: 颜色特征C2和C3正交于C1,将其分别表示为: 将其投影到(R,G,B)平面,可分别用向量(1/3,1/3,1/3),(1/2,0,-1/2)和(-1/4,1/2,-1/4)表示这些颜色特征.获得了颜色分布的特征向量之后,将颜色分布投影到一个新的特征空间中,使之形成一个较小的簇. 基于以上分析,能使RGB颜色特征空间转换到二维颜色特征空间上.在这个特征空间里,路面与车辆颜色在该二维颜色特征空间的分布区域的交集更小,路面与车辆像素能更好地分类. 笔者对收集的N幅图像进行Karhunen-Loève变换,发现训练数据集的最大特征向量接近(1/3,1/3,1/3),即此轴线被路面颜色当做中心,少量路面颜色散布在其周围,呈中性色,如图1所示. 从图1可以看出,在方向向量(1/3,1/3,1/3)为轴心的周围,路面颜色被聚集,呈半径较小的圆柱体状.据此,笔者提出RGB颜色特征空间由正交于轴线(1/3,1/3,1/3)的颜色平面(r,m)(Radius,Middle-range)来建模.那么在RM颜色空间中像素点Xi可通过式(4)变换: 经式(4)的颜色特征变换后,所有路面像素颜色值集中在一个较小的区域,这样既提高了建模的准确度,也降低了计算的复杂度. 图1 RGB空间的道路与车辆颜色分布Fig.1The pavement and vehicle color distribution of RGB space 2.2 贝叶斯分类器与车辆检测 通过颜色特征空间建模已经分割出了车辆行驶路面,分割之后只剩车辆像素和路面像素存在于图像中.在十字路口,静止与运行的车辆通常交替行驶,这种复杂的检测环境,基于背景统计建模的方法很难应对.因此,利用路面与车辆像素颜色的先验统计信息,根据贝叶斯分类器对车辆与道路进行像素类别分类[8-9],最后得到一个表示车辆检测结果的二值标注图像. 2.3 最小化图割与车辆目标分割 根据图论的思想,二值标注图像可以被映射成加权图,根据权重设计能量函数,用最小化能量函数完成对图的分割[10],就是以最小的误差得到车辆目标分割结果.那么如何让该分割的代价最小,这就是图的最小割问题. 根据Ford-Fulkerson理论[11],图的最小割问题等价于最大流问题.为解决该问题,我们采用的是Boykov Y等[12]提出的基于动态树的增广路径方法k该算法建立两个搜索树S和T,它们是非交叠的.搜索树S和T中的节点又被分为主动节点和被动节点,其中主动节点在树的外边沿,被动节点在树的内部.该算法分生长、增广、采纳三个阶段迭代执行.每当采纳阶段结束后,算法重新回到生长阶段,如果不存在主动节点,搜索树S和T就不生长,算法结束,饱和边将搜索树分裂开,这就是笔者需要的最大流,即最小割的边. 3.1 实验数据集 为度量笔者所提方法对城市交通场景中的车辆检测性能,在昆明一二一大街进行了交通视频图像的采集.图2显示了在不同时刻路面背景中同一位置像素点的颜色值波动情况. 图2 动态背景示例Fig.2The example of dynamic background 从图2可以看出,在光照与摄像头抖动的影响下,路面背景中同一位置像素点颜色分布与像素灰度变化显著.这是对基于该数据集实验的算法性能的巨大挑战. 3.2 实验步骤 笔者提出的基于颜色特征的车辆目标检测方法,其实验步骤如下: a.利用Hough变换对路面图像进行ROI分割,提取出路面ROI; b.进行颜色特征空间建模,建立理想的RM颜色特征模型; c.根据贝叶斯分类器对车辆与道路像素类别分类; d.基于最小化图割的思想完成对车辆目标的分割,得到车辆检测结果. 3.3 定质分析 在该场景中,对TAM算法、GMM算法、RGB颜色特征模型以及笔者所提出的基于颜色特征车辆检测模型进行了实验.为分析其性能,选择第232帧(存在静止车辆,并有部分静止车辆开始运行)图像进行对比分析.该帧图像中,左侧车辆是运动车辆,而右侧车辆是静止车辆.实验检测结果如图3所示. 在图3中,可以看出TAM算法与GMM算法在检测运行车辆时效果不错,但是检测右侧的静止车辆却显得无能为力,将其作为背景像素的一部分了.然而无论运动或静止车辆目标,笔者提出的基于RM颜色特征的车辆检测方法都能很好地检测出来. 图3 各方法检测效果Fig.3Comparison of four algorithms 3.4 定量分析 实际上,对图像像素进行二值标注就是车辆检测的本质,然后扫描图像标注集的类别标识,最后车辆目标被分割出来,这也就是图像目标分割.因此度量基于颜色特征的车辆检测算法与TAM和GMM算法的车辆检测性能时,笔者采用图像分割的性能评价标准,其简要示意图如图4所示. 图4 图像分割的性能评价标准示意图Fig.4The performance evaluation standard schematic diagram of image segmentation 在图4中,图像分割的目标区域(Object Region,以下简称:OR)与图像分割算法分割区域(Segmented Region,以下简称:SR)重叠区域即为图像分割算法分割的真实目标区域(Segmented Object Region,以下简称:SOR).据此,采用准确率(Ppre)、误检率(Pfalse)、漏检率(Pmiss)来评价图像分割算法的性能.根据图,可以得到如下计算公式: 根据式(5)、(6)和(7)度量了各算法在第232帧含静止车辆目标场景的车辆检测性能,各算法性能指标如表1所示. 表1 各方法性能比较Table 1Performance comparison of each algorithm 通过表1的实验结果可以看出,笔者提出的RM颜色模型无论是在准确率上,还是在误检率和漏检率上都是优于其他颜色模型和算法.这说明颜色特征模型是影响基于颜色特征的车辆检测算法性能的重要因素之一. 笔者利用颜色特征空间降维建立理想的颜色特征模型,对路面车辆进行检测.在现实场景采集数据图像后,通过实验对该方法与时间平均法,高斯混合模型和RGB颜色模型等方法进行定质和定量分析.相比之下,笔者提出的检测方法对于场景中的运动和静止车辆都能达到很好的效果,并且准确率更高. 致谢 国家自然科学基金委员会为本研究提供了资金资助,在此表示衷心的感谢! [1]ZIVKOVIC Z.Improved adaptive Gaussian mixture model for background subtraction[C]//Proceedings of the 17th International Conference on Pattern Recognition,23-26 August 2004.Piscataway,N.J.:IEEE,2004.28-31. [2]TSAI L W,HSIEH J W,FAN K C.Vehicle detection using normalized color and edge map[J].IEEE Transactions on Image Processing,2007,16(3):850-864. [3]WANG X Y,ZHANG J L.A traffic incident detection method based on wavelet Mallat algorithm[C]//Proceedings of the 2005 IEEE Mid-Summer Workshop on Soft Computing in Industrial Applications,28-30 June 2005Piscataway,N.J.:IEEE,2005.166-172. [4]樊晓亮,杨晋吉.基于帧间差分的背景提取与更新算法[J].计算机工程,2011,37(22):159-161. FAN Xiao-liang,YANG Jin-ji.Background extraction and update algorithm based on frame-difference[J].Computer Engineering,2011,37(22):159-161.(in Chinese) [5]杜鉴豪,许力.基于区域光流特征的异常行为检测[J].浙江大学学报:工学版,2011,45(7):1161-1166. DU Jian-hao,XU Li.Abnormal behavior detection based on regional optical flow[J].Journal of Zhejiang University:Engineering Science,2011,45(7):1161-1166.(in Chinese) [6]CHENG S C,YANG C K.A fast and novel technique for color quantization using reduction of color space dimensionality[J].Pattern Recognition Letters,2001,22(8):845-856. [7]赵杰文,方明,刘木华,等.基于Ohta和RGB颜色空间牛胴体背长肌的分割[J].江苏大学学报:自然科学版,2006,27(3):189-192. ZHAO Jie-wen,FANG Ming,LIU Mu-hua,et al.Segmentation of longissimus dorsi in beef carcass based on Ohta and RGB color systems[J].Journal of Jiangsu University:Natural Science Edition,2006,27(3):189-192.(in Chinese) [8]韩萍,徐建飒.复杂场景下的极化SAR图像机场跑道检测[J].信号处理,2013(9):1220-1226. HAN Ping,XU Jian-sa.Runways detection in complex scenes of polarimetric synthetic aperture radar image[J].Journal of Signal Processing,2013(9):1220-1226.(in Chinese) [9]孔文杰,张化祥,刘丽.基于图像复杂度和贝叶斯的图像自动标注[J].计算机工程与设计,2014,35(6):2100-2103. KONG Wen-jie,ZHANG Hua-xiang,LIU Li.Automatic imageannotationbasedonimagecomplexityand Bayesian[J].Computer Engineering and Design,2014,35(6):2100-2103.(in Chinese) [10]刘松涛,殷福亮.基于图割的图像分割方法及其新进展[J].自动化学报,2012,38(6):911-922. LIU Song-tao,YIN Fu-liang.The basic principle and its new advances of image segmentation methods based on graph cuts[J].Acta Automatica Sinica,2012,38(6):911-922.(in Chinese) [11]刘杨杨,谢政,陈挚.最大动态流关键弧的改进算法[J].计算机应用,2014,34(4):969-972. LIU Yang-yang,XIE Zheng,CHEN Zhi.Improved al-gorithm for vital arc of maximum dynamic flow[J].JournalofComputerApplications,2014,34(4):969-972.(in Chinese) [12]BOYKOV Y,VEKSLER O,ZABIH R.Fast approximateenergyminimizationviagraphcuts[J].IEEETransactions on PMAL Pattern Analysis and Machine Intelligence,2001,23(11):1222-1239. Color feature model in application of static vehicle detection ZHANG Li,DENG Ya-hang,RAO Xiao-li To improve the low accuracy in static vehicle detection in intelligent transportation,a vehicle targets detection method based on color features was proposed.Firstly,the pavement area of interest was segmented based on Hough transform,and the ideal color feature model was established by using the color feature space dimension reduction.Then,pixels of pavements and vehicles were classfied by Bayesian classifier,and finally the target vehicle was separated by the minimum cut/maximum flow algorithm.We made a comparative assessment of the proposed method with the existed methods after capturing live-actiontraffic video images.The results show that the detection accuracy is 63.05%,the false rate decreases to 21.27%and the miss rate decreases to 24.01%.Experiments show the proposed method can achieve excellent detection result in static vehicle targets. static vehicle detection;color feature;ehicle target separation TN911 A 10.3969/j.issn.1674-2869.2015.01.016 本文编辑:苗变 1674-2869(2015)01-0073-06 2014-12-24 国家自然科学基金(61063027) 张力(1963-),男,四川成都人,副教授.研究方向:计算机视觉、多媒术技术.2 颜色特征与车辆目标检测和分割


3 实验分析


4 结语
Faculty of Information Engineering and Automation,Kunming University of Science and Technology,Kunming 650500,China