基于CPLD的大功率高精度伺服系统位置信息实时采集系统设计与实现*
2015-06-05虞志源鲁文其袁嫣红张建亚胡东轩
虞志源, 鲁文其,2, 徐 讯, 袁嫣红, 张建亚, 胡东轩
(1. 浙江理工大学,浙江 杭州 310018; 2. 浙江大学,浙江 杭州 310018;3. 浙江卧龙控股集团有限公司,浙江 杭州 310000)
基于CPLD的大功率高精度伺服系统位置信息实时采集系统设计与实现*
虞志源1, 鲁文其1,2, 徐 讯3, 袁嫣红1, 张建亚1, 胡东轩1
(1. 浙江理工大学,浙江 杭州 310018; 2. 浙江大学,浙江 杭州 310018;3. 浙江卧龙控股集团有限公司,浙江 杭州 310000)
阐述了旋转变压器的工作原理,设计了两套位置信息采集方案。一种方案在CPLD、DSP、解码芯片之间采用独立总线的方式连接,实时地更新位置信息;另一种方案则是在CPLD、DSP、解码芯片之间采用共用总线的方式,只在需要时读取位置信息。给出了两种方案的硬件平台、设计思路和软件流程图,在原理上对其进行了相应的分析,并基于此进行了位置信息读取的试验测试。根据试验测试结果得知,两种方案都能准确读取位置信息,精度较高,较适合大功率高精度驱动的场合应用,且共用总线方案相比独立总线方案响应速度更快。
交流伺服系统; 旋转变压器; 位置检测; 大功率; 高精度
0 引 言
伺服系统因其稳定性好、高速、精度高等优点得到广泛运用,其运用场合主要在工业及民用领域,包括高精度数控机床、纺织机械、机器人等场合。随着科技的发展,人们对于系统的精度、性能等方面有了更高的要求。矢量控制算法作为控制策略的核心,其中的坐标变换对于位置检测精度的要求很高[1-2]。
永磁交流伺服系统中,常用的位置检测元件编码器按照工作原理主要分为增量式编码器和绝对式编码器[3]。增量式编码器依靠计数脉冲来计算位置,系统会出现零点偏移,这种偏移发现不了,解决的方法只能是开机找零,比较麻烦。该特性使得其只能应用于性能低、精度低的系统[4]。绝对式编码器则是一个数字码对应一个位置,不存在增量式编码器所带来的不便。其中光电编码器是常见的输出为数字量的绝对式编码器,这种编码器虽然分辨率高,但是不能适应复杂多变的环境,抗冲击、抗干扰能力较弱[5]。旋转变压器是输出模拟量的绝对式编码器,能运用于较复杂的大功率场合,有很强的抗干扰能力,自带隔离,使得系统稳定性高[6-7]。由于其输出返回信号为模拟量,如果不使用解码芯片,改用解码算法来实现转换会比较复杂,所以旋转变压器配合解码芯片能较好地获取位置信号[8]。
伺服拉床、伺服压力机、全电注塑机等[9-10]场合存在功率大、电流大、干扰强、振动大等特点,而光电编码器相较于旋转变压器在抗干扰、抗冲击方面弱势较明显。本文采用多摩川旋转变压器与AD2S1210解码芯片组成的反馈装置来获取位置信息,并设计了两种位置读取方案进行试验测试。
1 旋转变压器工作原理分析
旋转变压器的等效原理图如图1所示。左侧初级励磁绕组输入励磁电压,右侧次级感应绕组输出为两相正交的电压,大小跟其位置角度的正余弦有关,故可以通过返回电压信号来计算出其位置数据,且这两个绕组都在定子侧。转子侧则是一种特殊结构的线圈绕组,与初级和次级绕组磁通耦合。

图1 旋转变压器原理图
计算可得,旋变初级与次级电压关系式为
ER1-R2=E0sinωt
(1)
ES1-S3=KER1-R2cosθ
(2)
ES2-S4=KER1-R2sinθ
(3)
式中:E0——励磁最大幅值;
ω——励磁角频率;
K——旋转变压器变比;
θ——转子旋转角度。
2 位置检测方案设计
本文设计了两种位置检测方案。方案1为实时更新位置信息方案,需要使用独立数据总线,原理框图如图2所示。其原理是由DSP来负责发送控制信号给CPLD,CPLD负责对DSP的控制信号进行译码,从而控制解码芯片对旋转变压器返回的位置信号进行解码,并将位置信号储存在CPLD中,DSP在读位置中断时间到来时就读取一次位置数据。
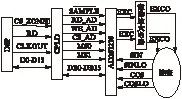
图2 DSP、CPLD、解码芯片之间独立数据总线的位置检测方案框图
方案2则是只在需要时读取位置信息,可以使用共用数据总线,原理框图如图3所示。DSP在需要时才会发送控制命令给CPLD,经过CPLD译码,控制解码芯片对旋转变压器返回的位置信号进行解码,并传给DSP。

图3 DSP、CPLD、解码芯片之间共用数据总线的位置检测方案框图
此外,由旋转变压器原理可知,旋转变压器需要外部激励电压输入才能正常工作,DSP才能得到解码芯片通过对旋变返回的正、余弦信号解码转化而来的位置信息数字量。AD2S1210所产生的激励电压不足以驱动旋转变压器,因此需要搭建一个激励放大电路来驱动旋转变压器。
如图4所示为设计的激励放大电路。根据电路原理中放大电路的原理可知,通过采用不同的R1、R2的阻值可以得到不同的输入输出电压的关系[11]。输出电路部分采用了推挽电路,可有效地消除交越失真。

图4 激励放大电路
输入UEXC与输出UEXCO的关系为

(4)
3 检测思路与软件设计
对于位置检测这个模块来说,DSP主要负责完成控制信号的发送和位置数据的读取,CPLD完成对DSP控制信号的译码。系统上电时,DSP给CPLD复位AD2S1210的控制信号,之后DSP发出配置AD2S1210控制寄存器和频率寄存器的控制信号,CPLD完成译码;配置好AD2S1210之后,DSP在需要位置信息时发出位置信号采样的控制信号,CPLD仍然完成这些信号的译码;最后DSP发出读位置信号,CPLD选通AD2S1210,数据在DSP外部接口XINTF的激活周期进入到DSP。流程框图如图5所示。

图5 软件设计流程框图
3.1 配置模式
AD2S1210有两种工作模式: 配置模式和普通模式。配置模式主要用来配置激励寄存器、控制寄存器、频率寄存器及其他寄存器。此模式下也可进行对位置和速度的读取。因此,AD2S1210可完全工作在配置模式下。如需工作在普通模式,则在初始配置完成后,退出配置模式,进入普通模式。A0、A1两个信号的逻辑决定了AD2S1210是处于配置模式或者普通模式,以及是否对位置或速度数据进行读取。
在配置模式下读取位置信息的程序流程图如图6所示。AD2S1210在经过上电复位之后进入配置模式,配置激励寄存器、控制寄存器及其他寄存器。在需要的寄存器配置完成后进行数据更新,然后就可以进行位置信息的读取。由解码芯片AD2S1210手册得知,在配置模式下,每次只能读取8bit信息,而位置信息是由地址0x80中的高8bit位置信息与地址0x81中的低8bit位置信息组成的16bit位置信息。因此需要读两次,先读高8bit,后读低8bit,读一次位置寄存器的时间间隔为10μs。

图6 配置模式的流程框图
3.2 普通模式
AD2S1210在完成所需要的配置之后,配置模式和普通模式下都能读取位置信息,由于配置模式下读一次数据要读两次,而普通模式下较为简便只需一次,并且配置模式下更主要的作用是为寄存器配置,因此本文采用普通模式。
3.2.1 方案1普通模式回读位置或速度信息
独立总线方式下的流程图如图7所示。

图7 方案1程序流程框图
在AD2S1210上电之后,先配置功能寄存器,配置好寄存器之后,从配置模式转换到普通模式。普通模式下,AD2S1210所转换得到的位置或速度信息在CPLD里面暂存,只要DSP读位置中断时间一到,即会读取位置或速度信息。
3.2.2 方案2普通模式回读位置或速度信息
共用总线方式下的CPLD程序流程框图如图8所示。

图8 方案2程序流程框图
可以看出方案2在AD2S1210起动转换之前跟方案1是相同的,在转换完成之后,方案2中则是确定有无DSP的读信号到来,来决定是否读取位置信号或者速度信号。
AD2S1210允许用户直接从并行输出或通过串行接口读取角位置或角速度数据,利用A0、A1输入可以选择所需的信息。这些输入也可用于使器件进入配置模式。例如,如需要读取位置信息,则A0置0,A1置0。在配置完寄存器之后,只有在接收到DSP读信号来临时才会读取AD2S1210中的位置或速度数据,存储在DSP中。
4 试验测试与分析
图9为试验的旋变实物图。

图9 旋变实物
采集了旋转变压器激励信号波形,旋转变压器在激励信号之下在某角度返回的SIN和COS信号波形,以及更新解码芯片信号sample和读取解码芯片信号rd_pg的波形。
图10为旋转变压器处于63°下,一路激励信号EXCO和旋转变压器返回的信号SIN的波形,可以看到EXCO的峰峰值约为3.2V,频率为10kHz,SIN信号的峰峰值约为1.52V。

图10 63°下激励EXCO和返回信号SIN波形
图11为旋转变压器处于63°下,一路激励信号EXCO和旋转变压器返回的信号COS的波形,可以看到EXCO的峰峰值约为3.2V,频率为10kHz,COS信号的峰峰值约为0.92V。

图11 63°下激励EXCO和返回信号COS波形
图12为AD2S1210更新信号sample和读取芯片信号rd_pg,更新的时间可以自己设置。本文设置其为7.5μs。

图12 7.5μs更新周期下sample和rd_pg波形
图13、图14为方案1和方案2手动逆时针和顺时针旋转旋转变压器的位置波形及速度波形。由图13、图14中波形可看到: 当逆时针旋转旋变时,AD2S1210返回给DSP的位置信息解码数据从0到65535(216)逐渐增加,直到65535该临界值之后又重新变为0;顺时针则刚好相反。两种方案对比来看,方案1的响应速度比方案2要快。
跟位置信息不同,速度信息是以补码的形式存储在AD2S1210中的,当以很小的速度逆时针旋转旋变时,速度是一个接近于0为正的数据,当顺时针以很小的速度旋转时,则是一个接近于65535的整数。

图13 独立总线方案下位置信息波形

图14 共用总线方案下的位置和速度波形
5 位置检测精度测试
将旋变固定一个位置,在不同的分辨率下检测其位置,测试位置精度。一共做了4组测试,分别是分辨率为10、12、14、16bit。对于每组数据,求出平均值,然后将这组数据中的20个数据每个均减去平均值形成图15中的4条曲线。图15中的系列1、系列2、系列3、系列4分别代表16、14、12、10bit分辨率下AD2S1210解码数据在平均值上下的波动情况。可以看到,16bit分辨率下,AD2S1210解码后的数据波动最小,其次是14bit,接着是12bit,波动最大的是10bit。

图15 不同分辨率下位置检测精度对比
根据AD2S1210的手册得知,通过配置其SC1和SC2引脚逻辑,其分辨率便可设置为10、12、14或16bit。当转子速度较高时,可以选择较低的分辨率;反之,转子速度较低时可以选择较高的分辨率。根据伺服系统运行速度,选择不同的分辨率,动态地分析问题,做到具体问题具体分析,便能很好地提高系统性能。
6 结 语
本文利用DSP+CPLD结构控制解码芯片AD2S1210,使其工作于不同的模式下对旋转变压器返回的信息进行解码,从而获得位置、速度等信息。采集了旋转变压器激励信号波形等各种试验波形。研究表明方案1和方案2都有其优缺点。方案1由于其DSP、CPLD、AD2S1210之间总线独立,造成位置信息响应速度比较慢,且需要把位置信号先存储在CPLD中,也占用了一定的CPLD资源,但是DSP无须等待,也有相应的算法,只需要切换地址来读取信息;方案2由于其DSP、CPLD、AD2S1210之间共用总线,位置信息不经过CPLD的暂存,直接由AD2S1210通过转换送给DSP,其响应速度较方案1而言要快。该方法也不需要解码芯片时刻放回位置信息的解码,在DSP的波形观测器中显示位置信息,从最后的位置信息波形可以看出,本文中的研究能较好地实现交流伺服位置检测。
[1] 潘宇.高精度交流伺服驱动优化研究[D].广州: 华南理工大学,2011.
[2] 张京娟,张仲毅,刘俊成.一种新型的旋转变压器测角误差标定技术[J].仪器仪表学报,2010,31(1): 149-153.
[3] 肖涛.伺服系统的高精度位置检测[D].武汉: 华中科技大学,2012.
[4] 付海军,李小艳.绝对式编码器的应用[J].微电机,2013,46(6): 91-93.
[5] 张剑,温旭辉,许镇琳.一种低成本永磁同步电机高精度转子位置检测方法[J].电气传动,2013,43(1): 77-80.
[6] 王征宇,陈建明,谭淼.永磁同步电机转子磁场初始位置检测研究[J].大功率变流技术,2013(1): 53-55.
[7] 边石雷,曹云峰,蔡旭.永磁同步电机初始位置检测研究[J].电力电子技术,2013(4): 39- 40.
[8] 王列虎.高精度数控伺服驱动检测及接口与位置直接闭环控制研究[D].广州: 华南理工大学,2011.
[9] 鲁文其.永磁同步电机重载驱动的曲柄伺服压力机动力系统参数[J].电工技术学报,2014,29(1): 91-97.
[10] 鲁文其,胡旭东,史伟民,等.基于扰动补偿算法的拉床主溜板双伺服同步驱动控制策略[J].机械工程学报,2013,49(21): 31-37.
[11] 崔旭涛,杨日杰,何友.基于DSP+FPGA的信号处理实验系统研制[J].仪器仪表学报,2007,28(5): 918-922.
Location Information Acquisition in Real Time Scheme’s Design and Application in High Response and High Precision Servo Based on CPLD
YUZhiyuan1,LUWenqi1,2,XUXun3,YUANYanhong1,ZHANGJianya1,HUDongxuan1
(1. Zhejiang Sci-tech University, HangZhou 310018, China;2. Zhejiang University, HangZhou 310018, China;3. Zhejiang Wolong Holding Group Limited Company,Hangzhou 310000, China)
Two sets of position detection scheme were designed. One connects CPLD, DSP and decoding chip with the method of independent bus. It could real-time update location information. The other connects CPLD, DSP and decoding chip with the method of shared bus. It only read location information when it need. Both schemes’ hardware platform, design thought, software flow diagram were proposed. Its principle was analyzed. The position information was detected based on these two schemes. According to these experiments, these two solutions all could read location information accurately with high precision, and be used in high power driving situations. Comparing with independent bus solution, Reuse bus solution had the faster response speed.
AC servo system; rotary transformer; position detection; high power; high precision
国家自然科学基金(No.11347125, 51407156,51307151);浙江省自然科学基金项目(No. LY14E070009,LY13E070005); 浙江省科技厅钱江人才项目(No. 2013R10064);中国博士后科学基金(No.2014M551735); 浙江省博士后科学基金(No. BSH1402065)
鲁文其
TM 921.54+1
A
1673-6540(2015)05-0011-06
2015-01-23
