一种树木聚集分布格局模拟方法*
2015-06-05麦春娜福州大学空间数据挖掘与信息共享教育部重点实验室福建省空间信息工程研究中心福建福州350002
麦春娜,邹 杰(福州大学 空间数据挖掘与信息共享教育部重点实验室福建省空间信息工程研究中心,福建 福州 350002)
一种树木聚集分布格局模拟方法*
麦春娜,邹 杰
(福州大学 空间数据挖掘与信息共享教育部重点实验室福建省空间信息工程研究中心,福建 福州 350002)
针对现有聚集分布格局模拟方法存在的模拟结果主观性强、不自然、未考虑树木冠层要素三维空间分布及生态学聚类效应等不足,提出一种新的模拟方法。该方法首先利用形变核方法创建树木二维空间分布,并采用立体体元法对树木逐一开展可种植性判断,之后采用DBSCAN算法对已有的树木分布点位开展聚集区域检测,并对检测后点位进行树种重分配。综合测试表明,本文提出的方法可较好地实现不同林分密度及树种条件下树木聚集分布格局模拟。
聚集分布;森林场景;形变核方法;DBSCAN算法;体元化;聚类效应
0 引言
虚拟森林环境是对现实森林环境的三维仿真与模拟,可广泛应用于林学、生态学及遥感等领域[1]。虚拟森林环境构建过程通常分为三步:(1)加载地形及环境等要素;(2)构建单树模型库;(3)根据树木空间分布格局将单树模型在地形上批量种植[2]。树木空间分布格局是虚拟森林环境构建的关键环节之一,其完整性及合理性对于虚拟森林环境的真实性及逼真度至关重要。目前常见的树木分布格局可分为随机分布、规则分布和聚集分布三种。由于林地条件、天气因子、聚类效应等因素的影响,森林样地内树木常呈现多个聚集中心成团、成块密集分布,即聚集分布。虚拟森林环境构建时,常用的树木聚集分布格局模拟方法有传统模拟法、经验模型法、动态演替法以及形变核方法。
传统模拟方法通过随机生成聚集中心以及聚集半径,并在该范围内随机创建树木种植点位的方式实现树木聚集分布格局模拟。传统模拟方法简单、高效,但存在模拟结果不自然、主观性过强的不足,朱磊等采用传统方法实现了林分聚集分布格局可视化模拟[3-5]。经验模型法基于森林实地调查数据建立模型开展树木聚集分布格局模拟,如金星姬等基于林地调查数据建立Gibbs预测模型并将其用于树木聚集分布格局模拟[6]。经验模型法可较好地保留森林样地树木分布特征,但其模型的建立依赖实地调查数据,因此可扩展性不强,不同林分条件下需重复开展实地调查。动态演替法是通过模拟树木自疏、演替和传播过程来实现树木聚集分布格局的模拟。Deussen和Lane等[7-8]采用该方法开展了不同聚集指数的聚集分布场景模拟;单梁等[9]在利用该方法实现森林动态演替可视化模拟的过程中得到了聚集分布的林分空间分布格局。形变核方法是由Lane等提出[8],该方法利用形变核函数动态调整树木种植概率密度函数来实现相同树种聚集分布模拟。形变核方法可克服传统模拟方法、经验模型法模拟结果无法兼顾森林生态系统聚类效应的不足,可较好地实现树种尺度的聚集效果,但场景尺度聚集效应模拟结果不理想。并且,整个形变核方法模拟过程均在二维平面上开展,未考虑树木冠层的三维空间分布特征,这是以上四种方法共同存在的问题。
本文针对现有的树木聚集分布格局模拟方法存在的不足及缺陷,以形变核方法为基础,首先基于树木可种植性判断方法模拟输出初步的树木种植点位,接着采用聚类算法对种植点位开展聚集区域检测,并依据检测结果开展树种重分配完成树木聚集分布格局模拟。
1 理论基础
1.1考虑树冠要素三维空间分布的树木可种植性判断
树木生长过程中由于光线、空间等养分的竞争,各树木冠层要素不存在相互重叠的现象。森林生态系统中植被冠层在垂直方向上常呈现乔木层、灌木层及草木层的垂直分层特征,其应为树木生长养分竞争的典型体现。传统树木分布格局模拟方法仅在二维平面开展树木种植点位模拟,未考虑树木冠层在垂直方向的分层特点及要素竞争特性。本文提出的树木可种植性判断方法考虑树木生长过程中的空间因子竞争,并在三维空间中开展树木聚集分布格局模拟。
树木可种植性判断主要通过树模型重构及种植可行性判断两个关键步骤实现。本文采用立体体元模型作为单株树木几何模型重构的基本数据结构单元,该数据模型求交计算简单,同时还可直接应用于现有的不同单树树木几何模型绘制方法(三角面片、椭球、圆柱等)。
树木可种植性判断方法具体步骤如下:
(1)单株树木几何模型体元化[10]。确定树木体元化模型基本体元大小,并对树木几何模型最小包围盒均匀剖分,形成树木体元几何模型索引,遍历树木立体体元,对体元和树模型的位置关系进行判断,保留与模型相交或位于模型内部的体元,剔除空体元。
(2)树木种植可行性判断。采用三个维向分别投影求交的体元求交方法对待种植树与已种植树的体元进行求交计算,若两树不存在相交体元,则树木种植成功,否则舍弃该树。
图1为考虑树冠要素三维空间分布的树木可种植性判断示意图。由图可知,考虑树冠要素三维空间分布的树木可种植性判断方法可避免传统方法仅在二维平面上开展树木可种植性判断的局限性,因而可较好地实现植被群落分层特征模拟。
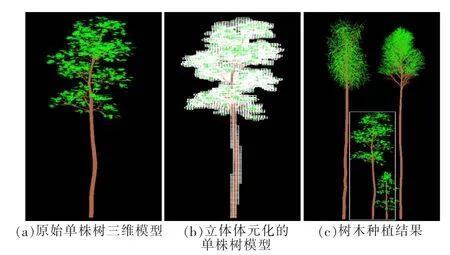
图1 考虑冠层要素三维空间分布的树木种植效果图
1.2基于形变核方法的树木种植位置模拟
形变核方法 (Deformation-Kernel Method)是基于联合概率密度函数f(x,y)[11]和形变核函数K(x,y)的一种聚类效应模拟方法,其可用于树木种植位置模拟,且其模拟的树木聚集区域及形状较传统方法真实感更强,也更为自然。形变核方法中 f(x,y)为待种植树木在空间位置(x,y)的种植概率,K(x,y)为以已种植树为中心,待种植树木种植在其周围空间位置(x,y)的概率变化函数。常见的形变核函数有促进型形变核、抑制型形变核及常数形变核三种,其中促进型形变核可提高树木在周围区域内的种植概率,从而使树木分布模式呈现聚集格局。
基于形变核方法的树木种植聚类效应实现原理为:
(1)根据式(1)利用逆变换方法[11](Inverse Transformation Method)确定树木在空间[0,Len]×[0,Wid]内的种植位置。

(2)形变核将对当前的 f(x,y)进行修改(式(2)),使在该树周围种植树木的概率增加,新树倾向于在已种树周围种植,最终场景会呈现出聚集状。

1.3树木分布聚集区域检测
树木聚集区域检测主要是为了实现场景中同树种聚类的生态学聚类效应,因此通过对形变核方法模拟结果开展树木种植聚集区域检测,并对聚集区域及非聚集区域开展树种重分配实现树木聚集效应模拟。聚集区域检测的目的是将点位中密集的区域及点位归类,可采用聚类分析方法。形变核方法模拟的树木种植点位聚集区域具有形状大小不一的特点,而基于密度聚类的算法可检测及识别任意形状及大小的聚集区域,因此本文采用经典的密度聚类算法 DBSCAN (Density-Based Spatial Clustering of Applications with Noise)算法[12],先设定密度阈值和邻域半径参数,再开展树木种植区域检测,检测结果将所有种植点位划分为聚集区域内点位以及区域外点位(即离散点)。
2 树木聚集分布格局模拟
2.1树木聚集分布格局模拟实现
基于树冠要素三维空间分布及生态学聚类效应的树木聚集分布格局模拟方法具体实现步骤如下:
(1)单株树木模型体元化。
(2)树木种植空间位置计算。确定f(x,y)以及K(x,y),采用逆变换方法求解树木种植空间位置坐标(x,y)。
(3)树木可种植性判断。为待种植树随机指定旋转角,并将其体元化模型种植在(x,y),采用树木可种植性判断方法评估位置(x,y)是否可种植。若树木不可种植,则返回步骤(2);若树木可种植,则提取该树信息,并基于公式(2)调整 f(x,y)得到新的概率密度函数,判断树木种植数量是否已满足循环终止条件,若未满足,则返回步骤(2),否则转至下一步。
(4)树木分布聚集区域检测。利用 DBSCAN算法对步骤(2)得到的树木种植点位开展聚集区域检测,并提取出各聚集区域种植点位及离散点。
(5)树木聚集区域点位树种分配。遍历聚集区域,随机为每一个聚集区域分配一个树种,并遍历该聚集区域内所有树木种植点位。若当前遍历点位的树种类型与聚集区域树种相同,则保留该点位信息;若当前遍历点位的树种类型与聚集区域树种不一致,则将该点位树种类型更换为聚集区域树种,对更换树种后的单树模型开展树木可种植性判断,并依以下两种情况分别处理:
①当树木可种植时,继续循环遍历聚集区域中下一个点位,直至该聚集区域树木种植点位循环结束;
②当树木不可种植时,将树木体元化模型分别进行平移、旋转或同树种模型替换,并进行树木可种植性判断,若树木可种植,则转至步骤①,否则重复②。
(6)树木聚集分布格局中离散点树种分配。遍历所有离散点,依次计算该点至所有聚集区域的二维平面距离,令该点树木类型与其最近的聚集区域树种类型一致,开展树木可种植性判断,若树木可种植,则继续循环遍历下一个离散点点位,否则采用步骤(5)中的方案②进行处理。
图2所示为树木聚集分布格局模拟流程图。
图3为采用本文方法模拟的林分密度为500株/公顷的树木聚集分布格局。其中(a)为基于形变核方法模拟的树木点位分布,(b)为树木聚集区域检测结果图,(c)为种植点位树种重分配后的最终结果图,图中不同的树种类型采用不同形状表示。本文所有模拟实验采用的树木几何模型均来源于辐射传输模型比较研究RAMI-IV (RAdiation transfer Model Intercomparison-IV)项目[13]及 6个不同树龄的云杉的几何模型[14]。图3所示模拟实验共采用了四个树种,六种不同树模型。由图3(c)可知,本文方法可实现场景尺度以及树种尺度的树木聚集分布格局模拟。
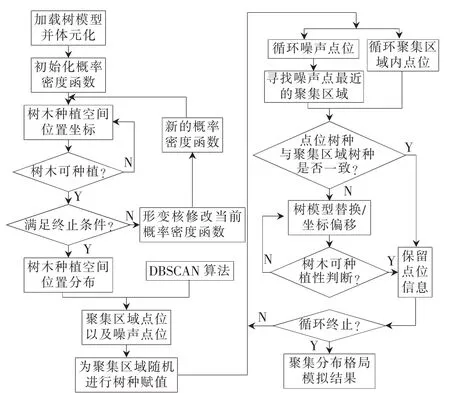
图2 树木聚集分布格局模拟流程图
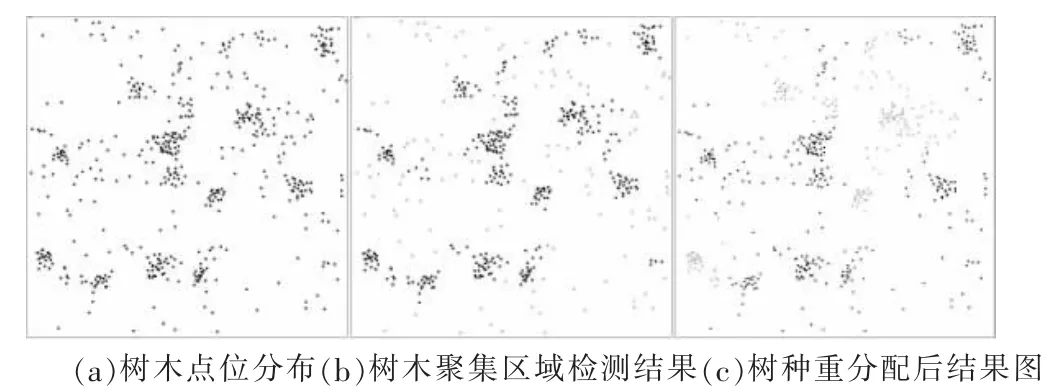
图3 树木聚集分布格局模拟结果示意图
2.2模拟实验
经过大量实验发现,本文提出的树木聚集分布格局模拟方法在不同林分密度以及不同树种数、树模型数条件下均能获得较好的模拟结果。图4为四种典型的树木聚集分布格局模拟结果示意图,由图可直观看出,各种情况下均达到了较理想的聚集分布模拟效果。通过观察图 4(a)、(b)、(d)可发现,本文方法在林分密度为 300 株/公顷、500株/公顷以及 1 000株/公顷时均可得到较好的模拟效果。分析图4中四个模拟实例发现,本文采用的模拟方法在2~7个树种,3~13个树模型的情况下均可得到较满意的模拟效果。
3 结论
本文针对目前聚集分布格局模拟中存在的模拟结果主观性强、模拟结果不自然,模拟方法未考虑树木冠层要素三维空间分布及生态学聚类效应等森林生态系统特征等问题,提出了一种顾及树冠三维空间分布及生态学聚类效应的聚集分布格局模拟方法。模拟实验表明,该方法可较好地在树种以及森林场景两个尺度上实现树木聚集分布模拟,并且在不同树种、林分密度及场景复杂度条件下均能得到较好的模拟效果。

[1]舒娱琴,祝国瑞,陈崇成.虚拟森林场景的构建[J].武汉大学学报,2004,29(6):539-543.
[2]甘龙飞,邹杰,唐丽玉,等.高逼真度虚拟森林环境的半球成像方法模拟分析 [J].地球信息科学学报,2013,15 (3):345-355.
[3]Zhu Lei,Zhang Huaiqing,Lin Hui,et al.Study on stand structure visualization based on GDI+[J].Agricultural Science&Technology,2011,12(1):144-148.
[4]李永亮,鞠洪波,张怀清,等.基于林分特征的林木个体信息估算可视化模拟技术[J].林业科学,2013,49(7):99-105.
[5]张宁,张怀清,林辉,等.基于竞争指数的杉木林分生长可视化模拟研究[J].林业科学研究,2013,26(6):692-697.
[6]金星姬,李凤日,贾炜玮,等.树木位置空间模式建模与预测[J].林业科学,2013,49(5):110-120.
[7]DEUSSEN O,HANRAHAN P,LINTERMANN B,et al.Realistic modeling and rendering of plant ecosystems[C].Proceedings of the 25th Annual Conference on Computer Graphics and Interactive Techniques:ACM,1998:275-286.
[8]LANE B,PRUSINKIEWICZ P.Generating spatial distributions for multilevel models of plant communities[C].Graphics Interface,2002:69-80.
[9]单梁,杨刚,黄心渊.森林动态演替现象的可视化模拟[J].中国图象图形学报,2013,18(12):1666-1675.
[10]穆斌,潘懋,邓剑.基于投影体积与八叉树的三维网格模型体素化方法 [J].地理与地理信息科学,2010,26 (4):27-31.
[11]ROSS S M.Introduction to Probability Models[M].New York:Academic Press,1997.
[12]ESTER M,KRIEGEL H P,SANDER J,et al.A density-based algorithm for discovering clusters in large spatial databases with noise[C].The 2nd International Conference on Knowledge Discovery and Data Mining(KDD),Portland,USA:AAAI Press,1996.
[13]European Commission.Radiation transfer model intercomparison(RAMI-IV)[EB/OL].(2012-04-04)[2014-09-22].http://rami-benchmark.jrc.ec.europa.eu/HTML/RAMI-IV/RAMI-IV.php.
[14]DISNEY M,LEWIS P,SAICH P.3D modelling of forest canopy structure for remote sensing simulations in the optical and microwave domains[J].Remote Sensing of Environment,2006,100(1):114-132.
A simulation method of tree clustering distribution
Mai Chunna,Zou Jie
(Key Laboratory of Spatial Data Mining& Information Sharing of Ministry of Education,
Spatial Information Research Center of Fujian Province,Fuzhou University,Fuzhou 350002,China)
A new simulation method of tree clustering distribution is proposed for deficiencies of current methods,such as subjectivity and artificiality,ignorance of tree canopy 3D distribution and ecological clustering effect.It firstly generates tree planting locations with deformation-kernel method,and carries out planting judgment by using tree voxels intersection method,then finds tree clustering regions based on DBSCAN algorithm,finally reallocates tree species for all tree locations.Experiments show that the method can work well with different stand densities and different trees species.
clustering distribution;forest scene;deformation-kernel method;DBSCAN algorithm;voxelization;clustering effects
TP39
A
1674-7720(2015)15-0085-04
麦春娜,邹杰.一种树木聚集分布格局模拟方法[J].微型机与应用,2015,34(15):85-88.
2015-03-03)
麦春娜(1989-),女,硕士研究生,主要研究方向:虚拟地理环境、激光雷达。
国家自然科学基金项目(41001203、41371330);福建省高校杰出青年科研人才项目(JA14033)
邹杰(1981-),男,博士,副研究员,主要研究方向:植被结构参数测量、定量遥感、激光雷达及其应用。