基于功率倒置测向的自适应抗干扰方法
2015-06-05李颖萍段艳丽樊昌周
李颖萍,段艳丽,樊昌周
(空军工程大学 信息与导航学院,陕西 西安 710077)
基于功率倒置测向的自适应抗干扰方法
李颖萍,段艳丽,樊昌周
(空军工程大学信息与导航学院,陕西 西安 710077)
针对功率倒置算法形成零陷不深的问题,提出了利用功率倒置算法搜索成型后方向图中最深零陷点来向,估计干扰信号来向,继而主动改变阵列单元的权值使得天线方向图零点对准干扰来向,实现干扰抑制。仿真结果表明:该算法是可行的,并且能够达到更深的干扰抑制性能。
抗干扰;功率倒置算法;最小均方算法;方向图
0 引言
随着导航系统的推广应用和快速发展,人们对其的依赖性也越来越高。卫星导航系统具有全球性、全天候、实时性、连续性等多个优势,能实时为用户提供精确的三维坐标、速度参数和时间信息。此外,在军事领域中为了实现实时指挥、精确打击、快速兵力投送等,需要最大限度地提高己方的导航能力[1],同时最大限度地遏制敌方的导航能力。因此对卫星导航抗干扰技术的研究显得尤为重要。
由于卫星载荷的限制,导航信号的功率不高,在传播过程中易受到各种外界干扰,如果在接收端不进行干扰抑制处理,会出现定位误差甚至给出错误的位置信息。
本文分析了基于功率倒置算法的干扰测向原理,在此基础上设计了一种能够应用于强干扰环境下的波束形成器。
1 自适应调零概述
自适应信号处理不需要信号的先验知识,在处理信号时,自适应滤波器的参数在不需要人工干预的情况下自动调整,使系统的输出信息达到符合设定的准则[2]。而自适应阵列天线是将天线阵列排布与自适应信号处理相结合,自动控制天线调整参数,使天线方向图主波束对准有用信号方向,零点实时指向干扰方向,从而达到抗干扰的目的。
功率倒置(Power Inversion,PI)是在卫星信号强度远远低于噪声信号强度的前提下,翻转卫星信号和噪声信号的功率比[3]。它以参考信号与阵列输出之差的均方最小为目标函数,根据系统误差调节阵列的权矢量,使目标函数达到最小,从而起到自适应调节的作用。功率倒置阵列直接将误差信号作为阵列的输出,不需要提前获取信号的入射方向和特性等信息,实现相对简单。最小均方误差算法(Least-Mean-Square,LMS)是由 Widrow和Hoff共同提出的,属于随机梯度算法中的一种。该算法的显著特点是运算简单,不需要矩阵求逆运算,因此被广泛应用。
Michael D.Zoltowski和 Anton S.Gecan将 LMS算法应用到功率倒置阵列[4-5],算法收敛后能在干扰方向形成一定的零陷。
功率倒置算法框图如图1所示。
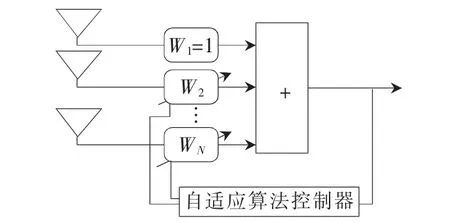
图1 功率倒置算法框图
设天线阵元个数为N,功率倒置阵列选择加权向量为w=[w1,w2,…,wN]T。第一阵元输出功率的权系数为常数。其他N-1阵元的加权系数可调节。
本文从理论分析的角度出发,设置四个天线阵元,分析其天线方向图,此时,权系数为:w=[w1,w2,w3,w4]T。在功率倒置算法中,接收信号中的最强信号分量应得到最大程度的抑制,因此,在自适应滤波器的实现中,选择某一阵元的接收信号为期望信号。通常,选择参考阵元的接收信号为期望信号。不失一般性,可令 w1=1。
输入信号为:

则期望信号应为:
d(n)=w1·s1(t)
滤波器的输出为:

阵列输出为误差信号,表示为:

梯度算法下,权系数更新表达式为:

式(4)中,μ为梯度算法迭代步长。从以上公式中可以看出,由于LMS算法的计算量小,将LMS算法应用在功率倒置阵列中可极大降低计算复杂度[6]。
2 阵列天线的数学模型
在实际情况中,天线阵列一般为四元阵列。本文选用阵列形状为正方形的4个天线阵元,如图2所示,阵元间隔为(λ为信号波长),以构成天线阵列[7]。
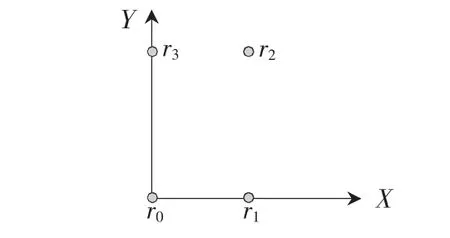
图2 天线阵元排布为正方形
图2所示各个阵元的坐标分别是:

相邻两个阵元之间的距离为波长的一半[7]。
图3中各个阵元的坐标分别是:
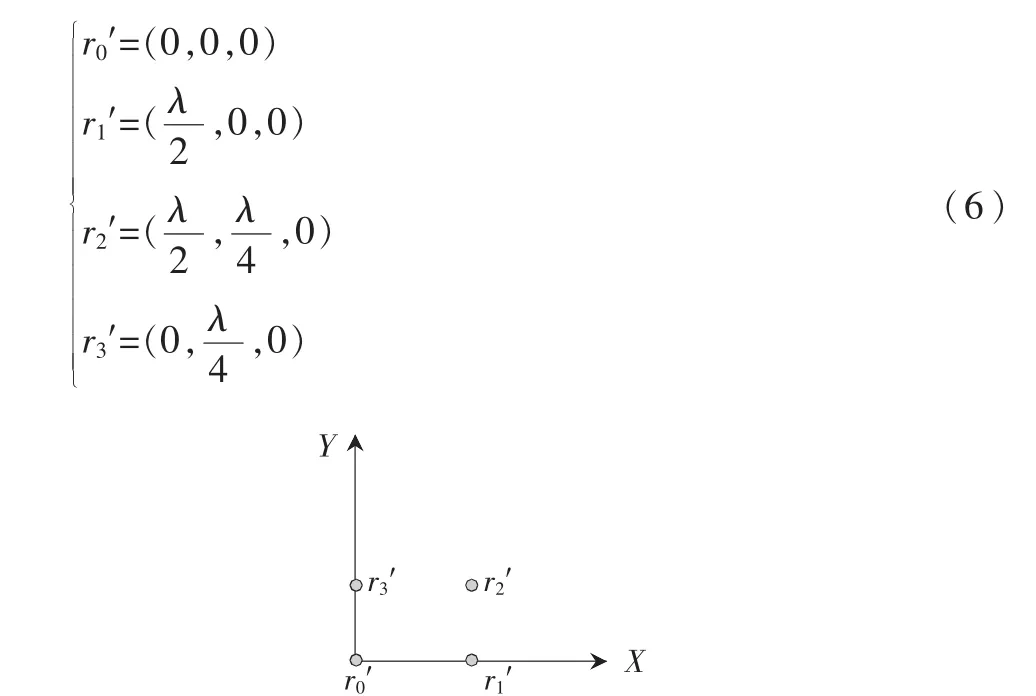
图3 天线阵元排布为矩形
r′0与r′1之间的距离为波长的一半,r′1与 r′2之间的距离为波长的四分之一。
在实际应用中,接收信号大部分符合窄带模型的要求,信号的带宽B远小于载波频率 fc。在此情况下,对于同一个信号,不同阵元对该信号的响应只相差一个相位。
假设信号源的载波为 ej2πfct,该信号以平面波的形式在空间沿波数向量k的方向传播。设基准点(坐标原点)的接收信号为 a(t)ej2πfct,由此阵列信号可以用向量的形式表示为:

假设信号方向矢量的模为1,在球坐标体系中该矢量可表示为(1,φ,θ)。θ为方位角,φ为仰角,则天线阵列的方向矩阵为:

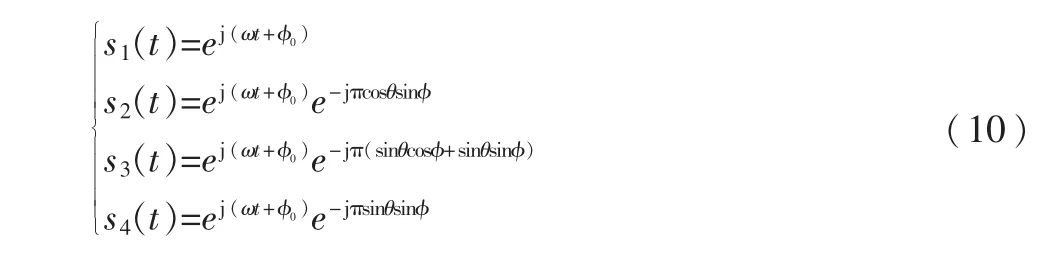
各阵元接收到的复信号为:

其中,ω为信号相位,φ0是初相位,ri是各个阵元的坐标。
由式(5)和式(9)可推出,当阵元排布为正方形时的天线接收信号可以表示为:
而由式(6)和式(9)可推出,当阵元排布为矩形时天线接收信号可以表示为:
当阵元加权值均为1,俯仰角为 0°时,仿真得到正方形排布的天线阵列在方位角为0°、90°、180°、270°时有零陷;仿真发现当阵元排布为矩形且相邻阵元之间间隔为、时,天线方向图在方位角为0°、180°时有零陷。
3 旋转方向图抗干扰
在天线阵列正方形排布的情况下,因其参考阵元在原点位置,可以通过改变其他3个天线的加权系数,从而等效于改变天线的相对位置。系统框图设计如图4所示。
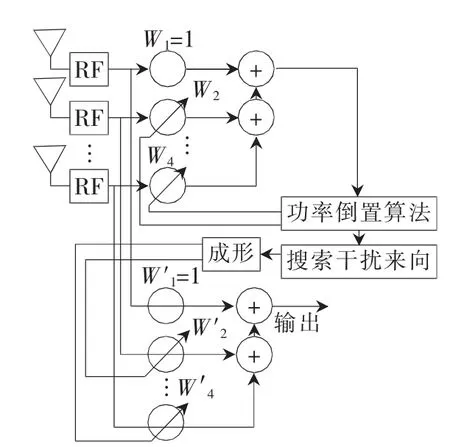
图4 抗干扰波束形成器
在仿真中可以看出,功率倒置算法在干扰处形成的零陷在-50 dB以内,而天线排布为矩形时,所形成的零陷增益在-300 dB以上,所以此算法利用功率倒置算法在干扰处形成的最深零陷来检测干扰的来向ξ,再通过改变权值的方式,等效于改变天线阵元的相对位置,将天线方向图的零点对准干扰方向,在卫星信号处不形成零陷。
通过功率倒置算法搜索加权后所形成的方向图零陷最深点即为干扰来向ξ,通过改变其他3个天线的加权系数将天线方向图的零点对准干扰来向ξ。
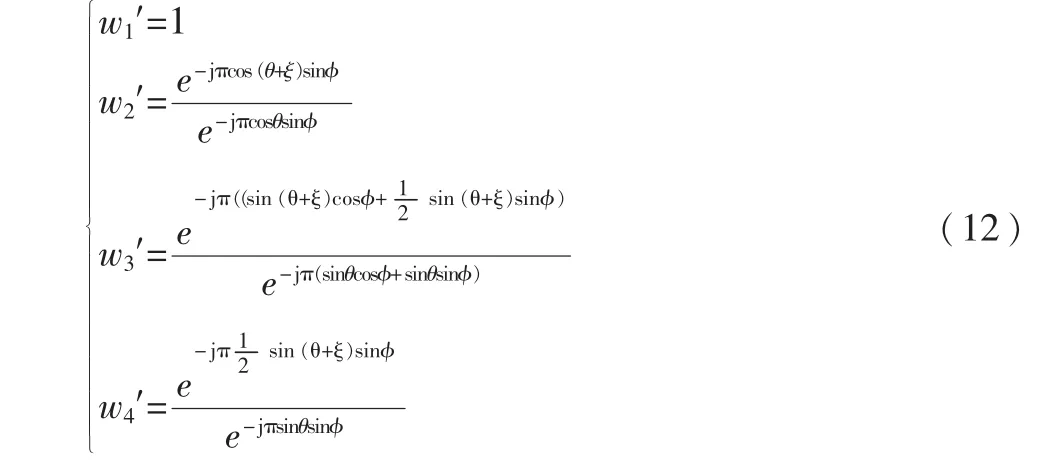
由推导可知,在 r0,r1,r2,r3上的加权值为:
4 仿真实现与结果分析
为验证本文提出的算法的有效性,本文进行了相关的计算机仿真,在以下的计算中俯仰角为0°。
LMS算法的性能与步长相关,步长大算法收敛速度快,但稳态失调误差大;步长小,稳态失调误差小,但算法收敛速度慢。在本文中,LMS算法的步长取信号最大值平方模值的十分之一时,算法在N=50以内收敛,则本文在N=50时,检测LMS算法最终形成的方向图的最低点进行干扰测向。
4.1仿真条件
仿真在 MATLAB里进行,载波频率相同,信号的幅度与干扰的幅度比为1:13,信噪比为20。信号采样序列的长度为500。
导航信号和干扰来向设置了以下三种情况:
(1)信号来向与干扰来向夹角较小:信号的来向为:15°、25°、65°、70°。干扰来向为:79°。
(2)信号来向与干扰来向夹角较大:信号的来向为:10°、50°、110°、160°。干扰来向为:245°。
(3)信号来向与干扰来向夹角为 180°:信号的来向为:30°、60°、120°、160°,干扰来向为:340°。
4.2仿真结果及分析
算法利用功率倒置算法测得干扰信号来向,继而计算在 r1,r2,r3,r4上的加权值。
虚线处为干扰来向,仿真图如图5。
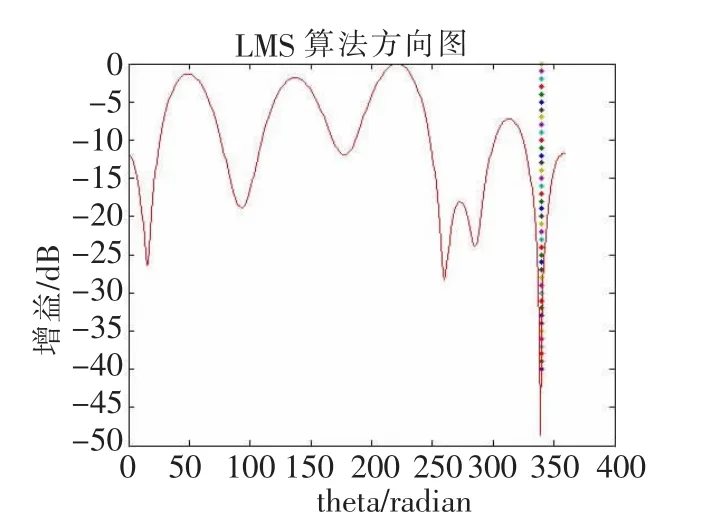
图5 功率倒置算法形成的方向图
由图5可知,功率倒置算法在干扰处形成最深零陷大于-45 dB。零陷深度未达到要求。
利用等效阵元位置变换的方法加权之后的方向图如图6~图8所示。
(1)干扰来向为:79°,如图6所示。
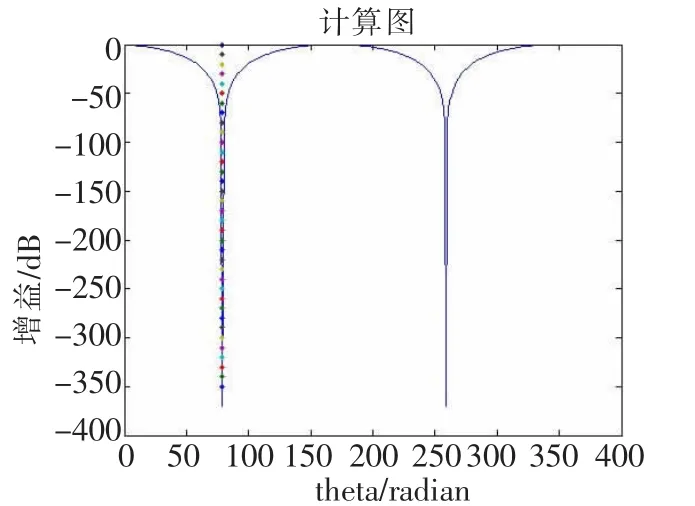
图6 加权之后的阵列方向图ξ=79°
由图6可知,在干扰来向和信号来向夹角较小时,此算法在干扰处ξ=79°时可形增益小于-300 dB的零陷,而在卫星信号来向为70°时,信号的增益大于-50 dB。
(2)干扰来向为:245°,如图7所示。
由图7可知,在干扰来向和信号来向夹角较大时,此算法在干扰处 ξ=245°时可形增益小于-300 dB的零陷,在卫星信号来向为10°、50°、110°、160°时,卫星信号处的增益大于-50 dB。算法达到了预计效果。
(3)干扰来向为:340°,如图8所示。
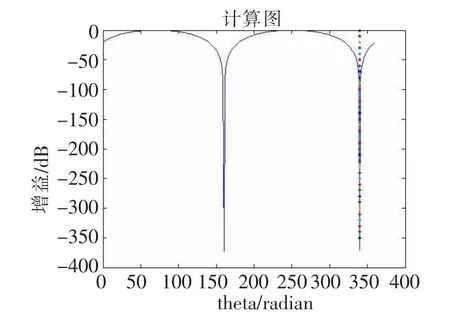
图8 加权之后的阵列方向图ξ=340°
由图8可知,在干扰来向和信号来向夹角为180°时,此算法在干扰处ξ=340°时可形增益小于-300 dB的零陷,在卫星信号来向为 30°、60°、120°时,卫星信号处的增益大于-50 dB,但在卫星信号来向为 160°时,形成了增益小于-300 dB的零陷。卫星信号处的增益大于-50 dB。对比可知得到了较好的效果。
5 结束语
由于功率倒置算法可以在最强信号来向上形成最大抑制,本文利用该算法搜索干扰信号来向,继而通过改变权值,等效地改变阵元相对位置,将零陷对准干扰方向。此方法的优势在于不需要方向图的先验知识,且因LMS算法计算量小,因此此算法整体计算量较小。软件仿真结果表明,该算法具有很好的零陷效果,能满足抗强干扰的要求,具有良好的应用前景。
在下一步的工作中作者拟解决本文算法在干扰来向反方向的零陷问题并在多方向干扰情况下对算法进行进一步改进。
[1]贾洪峰,康锡章.GPS接收机天线自适应抗干扰系统的设计[J].通信学报,2001,22(8):54-59
[2]徐晓强.自适应抗干扰调零天线[D].西安:电子科技大学,2008.
[3]庄学彬,崔晓伟,陆明泉,等.干扰环境下用于 GPS接收机的波束形成算法分析[J].系统工程与电子技术,2009 (3):570-574.
[4]ZOLTOWSKI M D,GECAN A S.Advanced adaptive null steering concepts for GPS[J].IEEE Military Communications Conference,1995,37(11):1214-1218.
[5]COMPTON R T,RUSSER J R.The power-inversion adaptive array:concept and performance[J].IEEE Transactions on Aerospace And Electronic Systems,1997,15(6):803-814.
[6]初明阳.自适应调零天线卫星定位抗干扰算法仿真研究[J].航空兵器,2014(3):44-47.
[7]邵江达.平面相控阵天线最佳阵面倾角和最大单元间距的确定[J].现代雷达,1997,2(1):49-53.
Mouser Electronics工业应用子网站再进化家庭和工厂自动化设计资源入驻
7月22日,贸泽电子(Mouser Electronics)宣布更新其工业应用子网站,新增家庭与工厂自动化的相关设计资源,让设计工程师能在Mouser.cn轻松查找有关家庭与工厂自动化最新进展的信息、资源和技术,以及打造最先进自动化系统所需的新一代元器件。本次网站更新源于Mouser携手格兰特·今原推出的最新Empowering Innovation TogetherTM系列之家庭与工厂自动化活动。工业应用子网站的更新包含3个家庭和工厂自动化应用的框图。其中,家庭或工厂多媒体门禁系统框图展示了如何通过有线或无线连接方式将现场音频和视频传送到远端位置,且只有非常低的功耗。物联网(IoT)传感器节点框图显示了如何借助IoT互连嵌入式系统,同时引入了两项不断进步的技术:无线连接与传感器。家居自动化部分中的第三个框图针对电子恒温器应用,可用于跟踪本地日期和时间,并可借助温度曲线进行编程,进而降低能耗。通过浏览详细的框图,可让使用者对于各家居和工厂自动化应用元器件一目了然。单击图中任一区块即会弹出Mouser库存的零件列表,详细列出此系统的建议元件,为用户节省搜索时间和精力。Mouser Electronics工业应用子网站还提供了最新的技术文章、应用笔记以及白皮书等。更多详情,敬请访问http://www.mouser.cn/applications/industrial_applications/。(贸泽电子供稿)
An adaptive anti-jamming method based on power inversion direction finding
Li Yingping,Duan Yanli,Fan Changzhou
(Information and Navigation College,Air Force Engineering University,Xi′an 710077,China)
In the power inversion algorithm,the depth of nulling produced may not be enough.To solve this problem,an adaptive anti-jamming method is proposed.The direction of the null point with the largest depth in the directional diagram after search formation by power inversion algorithm is used to estimate the incoming direction of jamming signal,which adjusts the weight of array elements to direct the null of antenna directional diagram to the jamming direction and suppress the jamming.The simulation proved the availability of the algorithm with enhanced suppression.
anti-jamming;power inversion algorithm;least square mean algorithm;directional diagram
TP301
A
1674-7720(2015)15-0033-04
李颖萍,段艳丽,樊昌周.基于功率倒置测向的自适应抗干扰方法[J].微型机与应用,2015,34(15):33-36.
2015-03-03)
李颖萍(1992-),女,在读研究生,主要研究方向:信号处理理论及应用。
段艳丽(1963-),女,硕士,副教授,主要研究方向:信号处理理论及应用。
樊昌周(1977-),男,硕士,讲师,主要研究方向:软件无线电。
