基于交叉耦合的浮筏举升系统模糊PI同步控制
2015-06-05吴金波李天奇
吴金波,李天奇
(华中科技大学 船舶与海洋工程学院,湖北 武汉 430074)
基于交叉耦合的浮筏举升系统模糊PI同步控制
吴金波,李天奇
(华中科技大学 船舶与海洋工程学院,湖北 武汉 430074)
针对某浮筏电液举升系统多缸运动同步控制问题,基于阀控液压缸的位置伺服系统数学模型,采用交叉耦合模糊PI同步控制方式,设计了一种形式简单的四缸同步控制策略,仿真与实验结果验证了该控制方法的有效性。与传统的“等同式”PID同步控制策略进行的对比结果表明,本文提出的控制策略具有较高的同步运动精度和较强的鲁棒性。
交叉耦合;模糊PI控制;同步举升;浮筏
0 引 言
浮筏作为一种新型的隔振装置,是把多个不同的机械设备安装在一个公共的筏架上,然后再将筏架弹性支撑或悬挂在潜艇或船舶壳体结构上[1]。在筏体的安装过程中,需要将筏架整体举升至一定高度,以便于在潜艇壳体与筏架间安装弹性支撑件。近年来随着浮筏向集成化、大型化方向发展,对筏架同步举升的精度和适应性提出了更高的要求。四缸同步举升为浮筏垂向位置调整的典型形式,由于筏架上安装设备及布置方式的多样性,要求四缸同步举升控制器具有良好的适应性,且在浮筏举升过程中,考虑各液压缸之间的耦合作用及外部干扰等因素,仅使用经典的“等同式”或“主从式”PID控制策略,效果往往并不理想[2]。而模糊控制通过引入模糊推理机,其抗外界干扰及适应参数变化的能力得到提升[3]。本文以某浮筏同步举升系统为研究对象,采用交叉耦合控制理论,并将模糊推理与PID控制方法相结合,设计位置同步控制器,以实现多缸运动同步控制。
1 电液阀控液压缸数学模型
对于比例阀控液压缸系统,假设阀是零开口四边滑阀,4个节流窗口匹配和对称,供油压力恒定,回油压力为0,阀在零位附近工作[4],则阀的线性化流量方程为:
QL=KQxv-KcPL。
(1)
式中:KQ为滑阀流量增益;Kc为滑阀流量-压力放大系数。
理想受控容腔的连续性方程为:
(2)
式中:AP为液压缸活塞面积;xp为液压缸活塞位移;Ctp为液压缸总泄漏系数;βe为有效体积弹性模量。
单杆液压缸力平衡方程为:
(3)
式中:Mp为活塞及负载的总质量;Bp为活塞及负载的粘性阻尼系数;FL为扰动力。
假设系统以惯性负载为主,忽略弹性负载、液压缸泄漏和粘性阻尼系数,对式(1)~式(3)进行拉普拉斯变换并联立方程,得到液压缸活塞位移xp与阀芯位移xv之间的传递函数为:
(4)
2 控制器设计
2.1 同步控制原理
交叉耦合模糊PI同步控制策略是根据交叉耦合理论,将传统PID控制与模糊控制相结合的同步控制方式。针对本文研究的四缸同步系统,选取一组阀控缸系统为自由通道,另外三组阀控缸系统为调整通道。仅在自由通道与调整通道之间进行输出比较,根据它们之间的同步误差对调整通道的PID参数进行在线自动调整。调整通道之间不再进行输出比较。这样实际上就将四缸同步问题转化成为3组具有相同自由通道的两缸同步问题。这种改进型的“等同式”同步控制策略,在原有的传统PID同步控制算法基础上,对通道间不确定的耦合关系进行了补偿。该控制结构简单易行,对于四缸以上的同步控制系统依然适用。
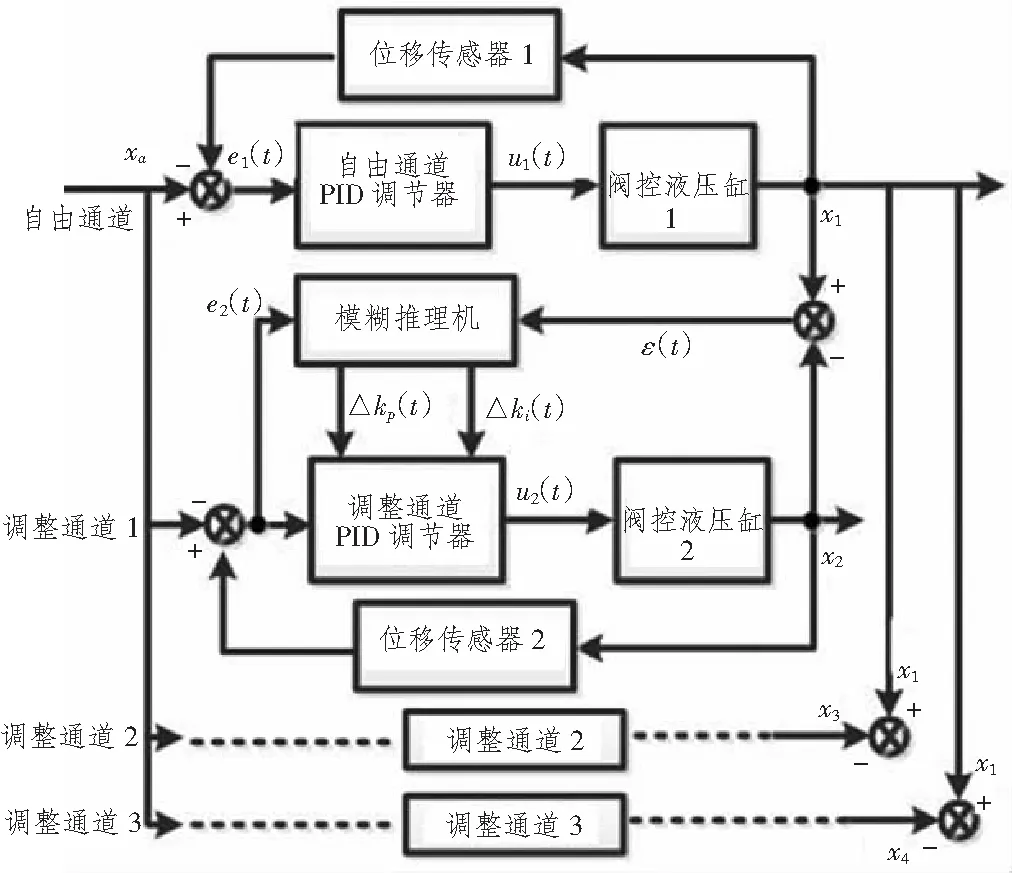
图1 系统控制结构图Fig.1 System control block diagram
图1为自由通道与调整通道1同步控制结构框图,调整通道2和调整通道3的控制同理。系统采用等同控制方式[5],即每个通道单独跟踪同一输入信号xa。xi为4个通道阀控缸系统的实际位置输出信号,e(t)为每个通道的跟踪误差,e(t)=xa-xi(i=1,2,3,4)。ε(t)为自由通道与调整通道之间的同步误差,ε(t)=x1-xi(i=2,3,4)。 自由通道阀控缸系统采用传统PID控制算法,调整通道阀控缸系统采用模糊PID控制算法,即在系统中引入以跟踪误差e(t)与同步误差ε(t)作为输入变量的模糊推理机,将模糊推理后得到的输出变量ΔKp(t),ΔKi(t)输入到调整通道的PID调节器,实现对调整通道控制参数的在线调整。
2.2 模糊控制器设计
根据上述分析设计一个二输入二输出的的模糊决策系统,如图2所示。输入变量为跟踪误差e(t)和同步误差ε(t),经过查询模糊规则表、模糊化、模糊推理、模糊判决[6],最后解模糊化得到输出变量ΔKp(t),ΔKi(t)。
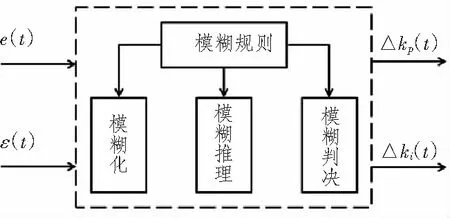
图2 模糊推理机组成框图Fig.2 The scheme of fuzzy controller
定义跟踪误差e(t)的语言值为{负大,负小,零,正小,正大},记做{NB,NS,Z0,PS,PB},模糊论域为[-1, 1];定义同步误差ε(t)的语言值为{负大,零,正大},记做{NB,Z0,PB},模糊论域为[-1, 1];输出ΔKp(t)变量和ΔKi(t)的语言值为{大,中,小},记做{B,M,S},模糊论域为[0,2]。
4个模糊变量的隶属度函数曲线均采用三角形函数,如图3所示。
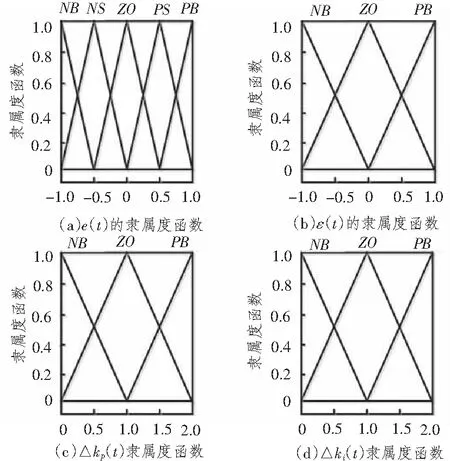
图3 隶属度函数Fig.3 Fuzzy membership function
根据ΔKp(t),ΔKi(t)两个变量在控制器中的作用,设计模糊规则如表1和表2所示。表中的模糊逻辑推理规则由实际调试人员通过大量实验获取,且经过了规则的完整性、相容性、干涉性检验[7]。
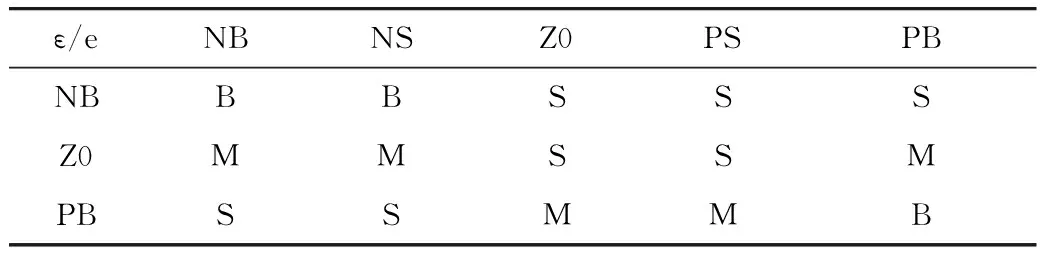
表1 ΔKp(t)的模糊控制规则表Tab.1 Fuzzy rule of ΔKp(t)
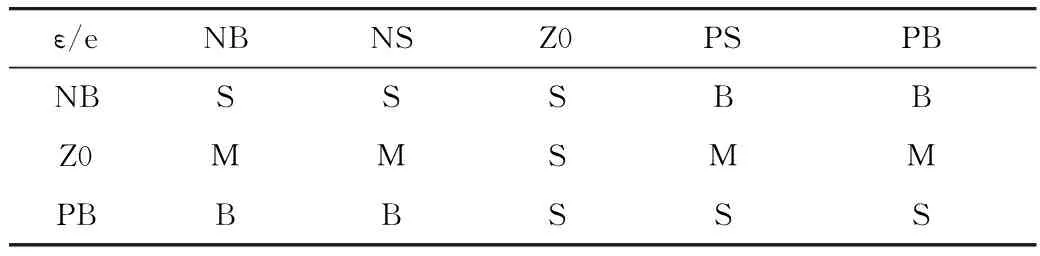
表2 ΔKi(t)的模糊控制规则表Tab.2 Fuzzy rule of ΔKi(t)
通过模糊子集的隶属度函数计算,对输出变量采用重心法进行逆模糊化,得到修正参数ΔKp(t), ΔKi(t),将修正参数引入到PID调节器进行参数调节,得到最终PID控制参数输出。
(5)
(6)
3 仿真研究
为验证交叉耦合模糊PI控制有效,在Simulink仿真工具箱中,分别用传统的“等同式”PID控制与交叉耦合模糊PI控制对四缸同步系统进行仿真分析对比。在实际工程中,浮筏负载分布不均,前部与后部液压缸的承载重量相差较大。对于总重量270t的浮筏系统,4个液压缸模拟载重分别为30t,40t,100t,100t。取阀控缸1系统(负载100t)为自由通道,阀控缸2(负载40t)、缸3(负载30t)系统为调整通道,由于缸4(100t)负载与缸一相同,数学模型相似,因此不再重复仿真研究。对于同步举升系统,指令信号一般为斜坡信号[8]。对阀控缸1、缸2与缸3系统施加如图4所示的同一斜坡信号,同时加入外部随机干扰信号,仿真结果如图5~图7所示。
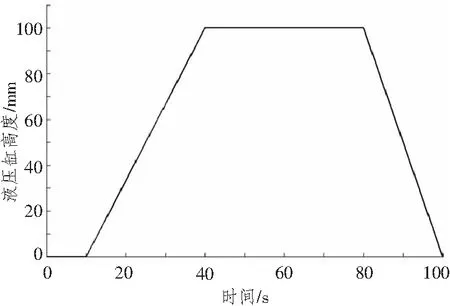
图4 输入信号Fig.4 Input signal
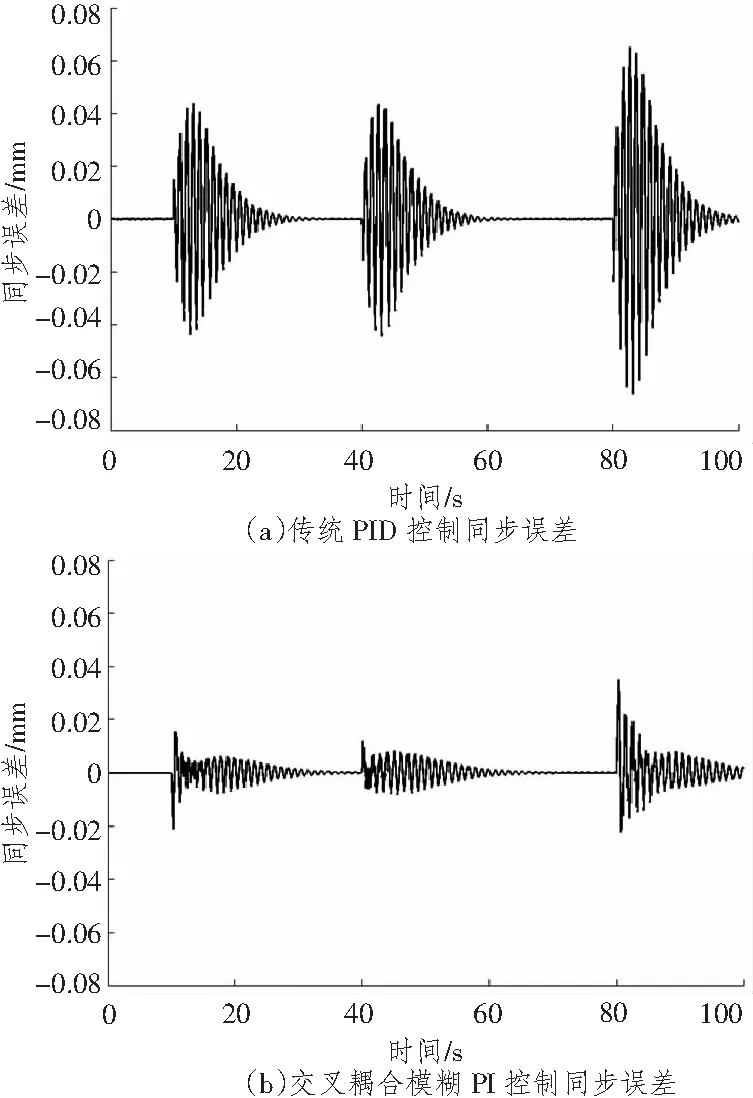
图5 缸1与缸2同步误差Fig.5 Synchronization error between cylinder one and two
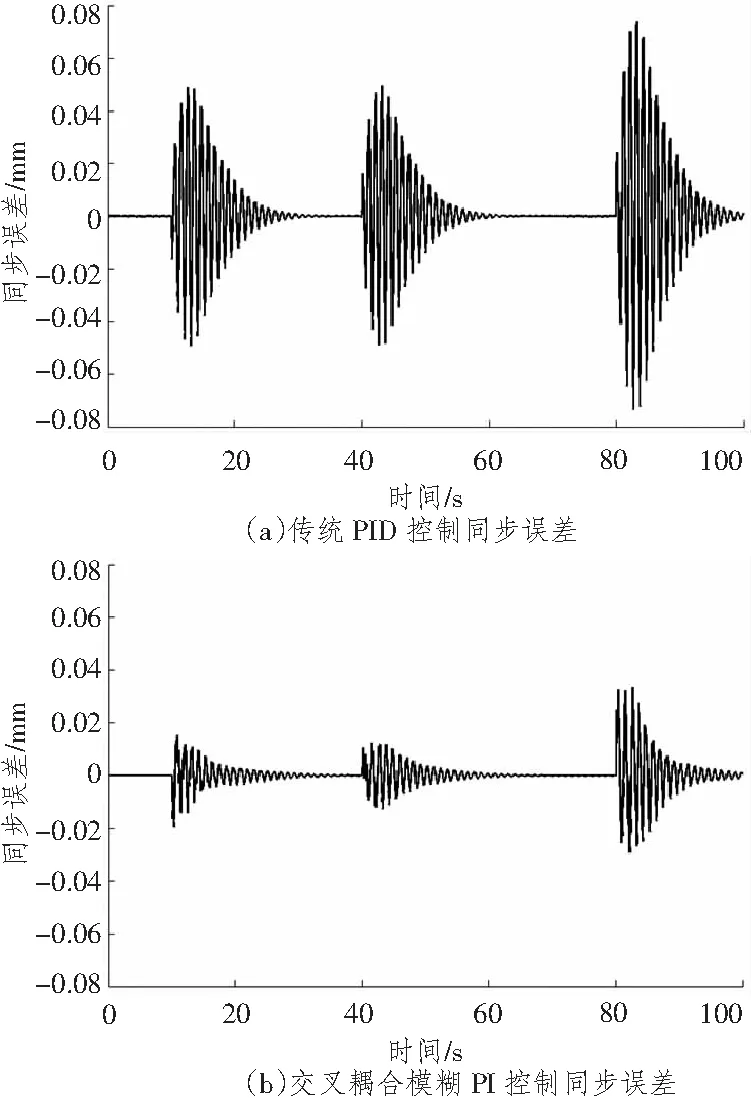
图6 缸1与缸3同步误差Fig.6 Synchronization error between cylinder two and three
仿真结果表明,和传统“等同式”PID控制相比,交叉耦合模糊PI控制具有更好的动态同步性能。在指令信号改变时,通道间的同步误差明显减小,整体上提升了4缸同步系统的同步控制精度。
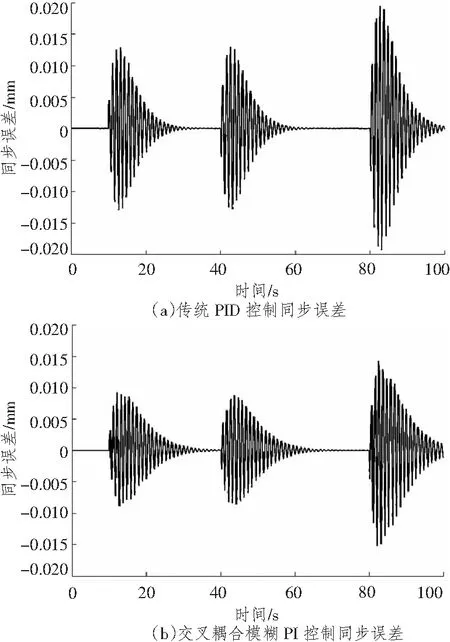
图7 缸2与缸3同步误差Fig.7 Synchronization error between cylinder two and three
4 实验研究
根据以上仿真结果,针对270t浮筏进舱系统进行实验研究。浮筏进舱系统主要由机械支撑、液压驱动和电气控制3部分组成,用以实现重型浮筏的顺利进舱和舱内位置调整等工作。
图8为浮筏举升系统液压原理图。系统主要由液压泵站、供油压力调节、油量调节及液压缸位置输出四部分组成。4个相同的比例阀控液压缸对称布置于浮筏四角,通过比例阀13阀口开度大小对液压缸升降速度进行控制,液压缸实时位置由位移传感器检测并发送回控制器。系统压力由柱塞泵3提供,具体压力值可在压力表10上显示。液压系统油量可通过比例节流阀12进行调节。
为了保证系统的安全,系统中配置有电磁溢流阀防止液压系统内部压力超高;配置的电接点温度计,可将压力油温度超高信号及时反馈给监测和控制系统,以便采取调节、设定或停机措施。所有液压承重元件都具有自锁功能,保证液压系统发生突然泄漏或破裂事故时,举升状态不发生改变。
控制器采用德国BECKOFF的嵌入式PC控制器,系统控制周期为5ms。四缸承受负载力分布近似为30t,40t,100t,100t。指令信号为斜坡曲线,举升速度60mm/min,液压缸从零位开始同步举升。
分别采用传统“等同式”PID算法和交叉耦合模糊PI算法对系统进行控制,取4缸间最大同步误差进行研究。对于本系统而言,4组液压缸自身动态性能相似,同步误差主要由惯性负载分布不均引起。因此最大同步误差出现在承载30t与100t液压缸之间。最大同步误差曲线如图9所示。
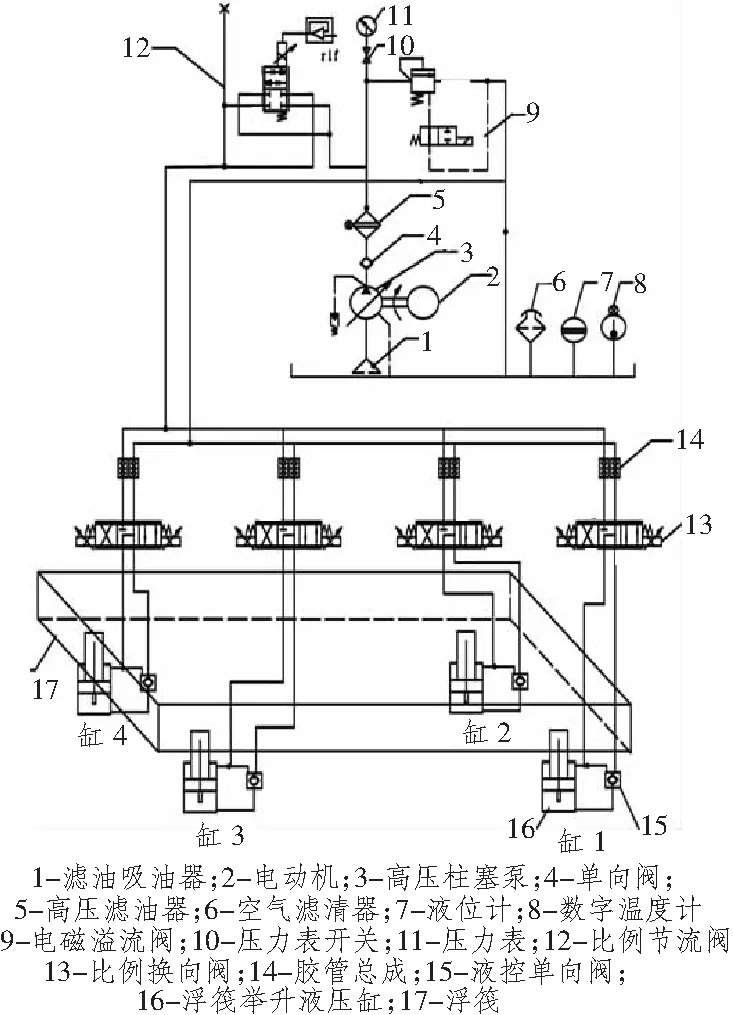
图8 液压原理图Fig.8 Hydraulic principle diagram
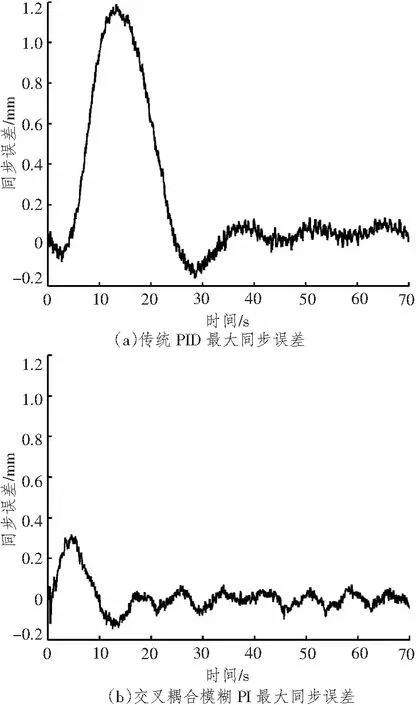
图9 实际最大同步误差Fig.9 The actual maximum synchronization error
由实际最大同步误差曲线可以看出,在开始同步举升阶段,由于液压缸之间动态性能及负载不同,同步误差较大。使用传统PID控制最大误差接近1.2mm。而采用交叉耦合模糊PI控制后,最大同步误差控制在0.4mm以内,且收敛更快,稳态误差更小。证明该同步控制策略具有较好的同步精度及鲁棒性。
5 结 语
针对浮筏舱内垂向位置调整系统中的四缸同步问题,提出交叉耦合模糊PI控制方法。仿真与实验结果表明,与传统“等同式”同步控制策略相比,该控制方法可以有效提高系统动态性能,减小同步误差,增加系统同步控制精度。对于同步精度要求较高的大负载同步举升系统,有一定的实际意义。
[1] 董宗鹏,章艺,尚国清,等.舱筏隔振系统水下振动特性的理论分析与试验研究[J].振动与冲击,2005,24(6):71-74.
DONGZong-peng,ZHANGYi,SHANGGuo-qing,etal.Theoreticalandexperimentalresearchonthevibrationofcabinwithfloatingraftisolationsystem[J].JournalofVibrationandShock,2005,24(6):71-74.
[2] 董春芳,孟庆鑫.多缸电液调平系统相邻交叉耦合同步控制[J].哈尔滨工程大学学报,2012,33(3):366-370.
DONGChun-fang,MENGQing-xin.Synchronizationcontrolofanelectro-hydrauliclevelingsystembasedonadjacentcrosscoupling[J].JournalofHarbinEngineeringUniversity,2012,33(3):366-370.
[3] 蔚东晓,贾霞彦.模糊控制的现状与发展[J].自动化与仪器仪表,2006(6):4-7.
WEIDong-xiao,JIAXia-yan.Presentsituationanddevelopmentoffuzzycontrol[J].Automation&Instrumentation,2006(6):4-7.
[4] 王春行.液压控制系统[M].北京:机械工业出版社,1999:40-41.
[5] 高恒路,桑勇,邵龙潭.同步控制策略及其典型应用的研究[J].液压气动与密封,2012,32(5):1-6.
[6]CHENCheng-yi,LIAOPing-sung.Fuzzycontrollerdesignforpositionandsynchronizationofelectro-hydraulicsystem[C]//IndustrialElectronicsandApplications, 2ndIEEEConference,Harbin,May,2007:23-25.
[7] 倪敬.电液伺服同步驱动系统控制理论与应用[M].北京:机械工业出版社,2013:87-89.
[8]DUHeng,WEIJian-hua.Motionsynchronizationcontroloffourmulti-stagecylinderselectro-hydraulicelevatingsystem[C]//MechanicAutomationandControlEngineering(MACE),InternationalConference,Wuhan,2010:26-28.
Synchronized fuzzy PI control for raft lifting system based on cross-coupling
WU Jin-bo,LI Tian-qi
(School of Naval Architecture & Ocean Engineering, Huazhong University of Science and Technology,Wuhan 430074,China)
In order to solve the multi-cylinder movement synchronization problem of an electro-hydraulic lifting system for floating raft, a simple four cylinder synchronization control strategy based on the mathematic model of the valve controlled cylinder electro-hydraulic position servo system was developed by employing the cross-coupling PI synchronization control structure with fuzzy inference engine.The efficiency of the proposed control method was demonstrated by the simulation and experimental results.Compared with the controller based on the traditional ‘equivalent’ synchronization control strategy, the control strategy proposed in this paper had higher synchronous accuracy and better robustness.
cross-coupling;fuzzy PI control;synchronous lifting;floating raft
2015-03-20;
2015-05-22
国家自然科学基金资助项目(50909046);中央高校基本科研业务费专项基金资助项目
吴金波(1974-),男,副教授,研究方向为舰船运动仿真、水下机器人的操作与控制。
TH137
A
1672-7649(2015)12-0033-05
10.3404/j.issn.1672-7649.2015.12.007