地铁列车ATO模式对标停车不准故障分析
2015-06-01王鹏
王鹏
(广州市地下铁道总公司,广东广州510000)
地铁列车ATO模式对标停车不准故障分析
王鹏
(广州市地下铁道总公司,广东广州510000)
广州地铁5号线列车在乘客较多时,经常会出现ATO对标停车不准。现对这一故障进行分析,发现根本原因在于6 km/h以下的电空混合制动配合不好。
ATO;故障;停车精度;电空混合制动
城市轨道交通车辆普遍采用自动驾驶(ATO)模式,保证列车高效运行,并降低司机的工作强度。车站站台基本上都配置了屏蔽门系统,就要求ATO系统必须能够实现精准停车,列车车门与车站屏蔽门只有对位准确,乘客才能顺利上下车。而且如今的城市轨道交通客流量大、发车密度大,对站台停车的时间要求非常严格。如果列车停车的位置有偏差,乘客上下车的时间就会延长,将直接影响列车的准点运行。因此,对ATO模式列车站台精确停车有了更高的要求,通常,列车在车站站台的停车精度为±0.3 m时,应保证列车停在该停车精度范围内的概率为99.99%;列车在车站站台的停车精度为±0.5 m时,应保证列车停车在该停车精度范围内的概率为99.998%。[1]
5号线列车在客流高峰期间经常出现停车精度达到了0.5 m,车门和屏蔽门完全错开,迫使列车不得不后退重新对标。后退列车耗费时间较长,给正线运营带来了很大的麻烦。但是在列车乘客较少的时段,停车精度都比较好。
1 故障调查
通常15:00~16:00时间段的乘客较少,17:00~18: 00时间段由于进入了下班高峰期而乘客较多,又以车陂南站至西村站之间的乘客最多,列车的载客量基本接近AW2状态。记录这两个时间段,列车在各站的停车精度数据如表1所示。其中,“+”表示过标,列车停车位置超过了停车标志位;“-”表示欠标,列车停车位置不到停车标志位。
在乘客较少的时间段,列车对标误差基本维持在+ 20,在正常的误差范围之内。但是在乘客较多的时间段,列车对标误差变化比较大,从+10至+50不等。对标误差在+30至+50之内,就会降低上下乘客的效率。对标误差达到或者超过+50,列车需要后退并重新对标停车。
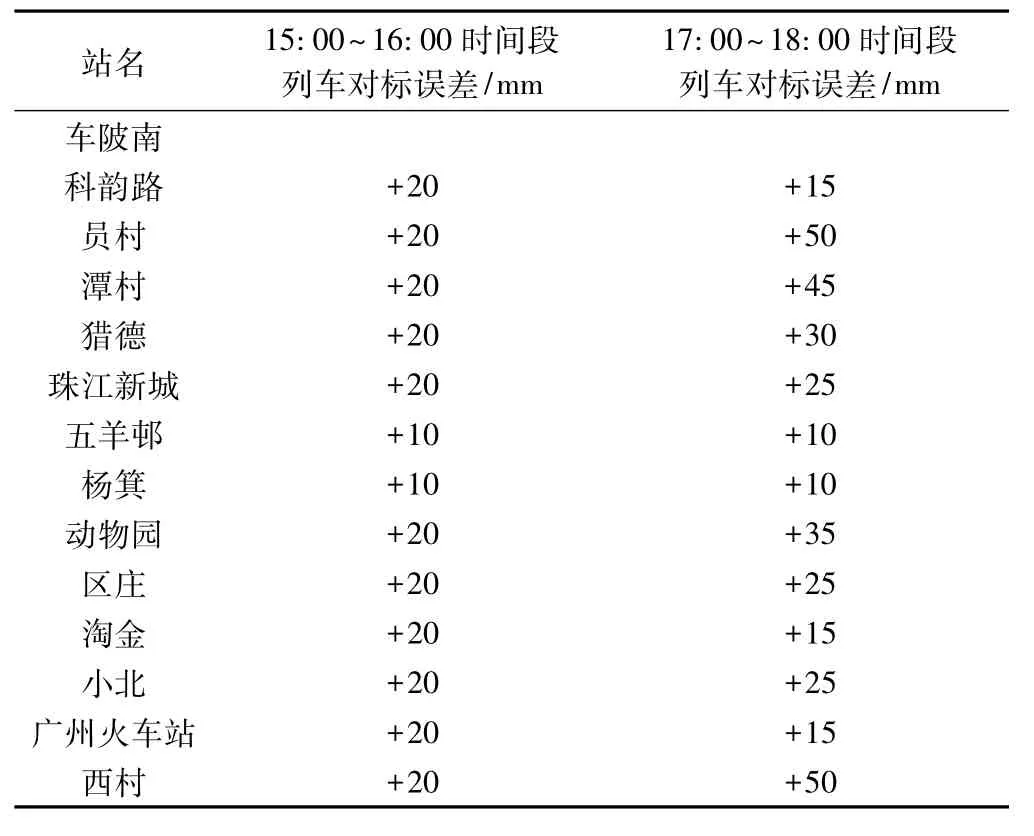
表1 各站列车对标情况
2 ATO模式列车停车过程
ATO模式列车的停车过程,是跟踪一条恒定制动率的推荐速度曲线的过程[2]。ATO系统根据实时反馈的列车实际速度和列车位置信息,计算实际速度和推荐速度之间的差值,得出所需的制动指令值,传送给列车。列车根据制动指令值,计算出所需的总制动力,根据情况由电制动执行,或者空气制动执行,或者两者都有。整个过程如图1所示。如果列车的实际速度曲线能够与该速度曲线完全重合,则列车将完美的实现对标停车。但是实际上,列车受速度检测误差、列车位置误差、制动力误差、轮对打滑等因素的影响[3],时刻都可能造成实际速度曲线偏离推荐速度曲线,此时ATO系统会通过实际速度与推荐速度的差值,增加或者减少制动力进行调整,使实际速度不断的跟踪推荐速度,直至列车速度为零。

图1 ATO控制示意图
在5号线列车制动停车的整个过程中,由于直线电机无法电制动到零速,速度在6 km/h以上时,列车以电制动为主,载荷在AW2以下空气制动不需要补充。列车速度降到6 km/h以下后,电制动力逐渐减少直至到零,同时空气制动力逐渐增加,并维持总制动力不变,如图2所示。在接近零速的时候,列车进入保压制动模式(保压制动力为最大常用制动力的70%),直至停稳[4]。

图2 电空混合制动示意图
3 列车过标原因分析
在乘客较少的时段,列车对标误差基本维持在+20 mm,列车停车曲线如图3所示。列车速度从大约6 km/h开始,电制动力逐渐减小,直至完全退出。但是气制动力并没有在电制动力减小的同时及时增大,来维持总的制动力恒定,如图4所示电空混合制动部分,电制动力曲线和空气制动力曲线没有形成类似图2的交叉。由于总的制动力出现减小,列车速度曲线逐渐偏离了预先的斜率,制动距离相应延长,因此对标误差基本维持在+20 mm,在允许范围之内。
进一步调查总制动力出现减小的原因。在电空混合制动开始之前,列车牵引系统会向制动系统发出电制动力退出的信号,从这一信号发出到电制动力实际退出有约0.5 s的延时。但是在实际控制中,由于系统之间信号传递延时的影响,0.5 s延时并不充足。制动系统在收到电制动退出信号不久,实际的电制动力就已经开始退出了。空气制动力施加因此而滞后,如图4所示,电制动力几乎降到零了,空气制动力才开始增加,造成了在这期间总的制动力出现了短暂下降。

图3 乘客较少的时段,对标误差维持在+20的停车曲线

图4 电空混合制动部分,取自图3
在乘客较多的时段,列车部分站台停车误差达到了+50 mm,如图5所示列车停车制动曲线。由于电空混合制动过程中存在的制动力短暂下降问题,当列车从轻载变为重载,车重的增加将会放大制动力短暂下降这一问题,在6 km/h以下的制动距离会变的更长,造成列车进站对标误差从+20 mm延长到了+50 mm。虽然通过速度反馈,ATO发现列车速度下降过慢,就不断提高制动力来降低车速,甚至达到了100%制动力。但是,此时已经到达了停车制动阶段的末期,到列车速度为零的时间非常有限,受空气制动系统响应的限制,已经无法避免制动距离进一步延长。
仍然是在乘客较多的时段,列车部分站台停车过标并不大。以淘金站的停车曲线为例进行分析,列车在淘金站的对标误差只有+15 mm,如图6所示。该站列车电空混合制动期间,电制动力刚开始减少,空气制动力就开始增加,形成较好的交叉曲线,总制动力基本能够维持恒定,如图7所示,因此对标误差就比较小。在图6中,当电制力开始退出时,ATO给出的制动力指令值已经达到了约70%,此时制动系统不再等待牵引系统给出的电制动退出信号,直接开始施加制动,空气制动施加恰巧不再滞后。而在图5中,电制力开始退出时,制动力指令值只有大约50%,制动系统仍然在等待牵引系统给出的电制动退出信号,因此空气制动施加就滞后了。

图5 乘客较多的时段,对标误差+50的停车曲线
4 结束语
综上所述,5号线列车ATO定位停车过标的根本原因在于列车低速阶段时电空转换匹配性不好。牵引系统给出的电制动退出指令的延时不足,使在电制动力减少时,空气制动没有及时响应和补足电制动力的缺失,造成列车总的制动力减少,因而延长了速度6 km/h以下的列车制动距离。在客流高峰时期,载客量的增加使得列车总质量增加,使得速度6 km/h以下的列车制动距离变得更长,甚至对标误差达到了+50 mm。而且此时处于停车制动的末期,ATO通过增大制动力指令值来减少制动距离的措施,由于系统响应时间、空气制动系统误差等因素的影响,无法达到调控的目的。

图6 乘客较多的时段,淘金站停车曲线,对标误差+15

图7 电空混合制动部分,取自图6
[1] 王道敏.ATO站台精确停车功能实现的制约因素分析[J].铁路通信信号工程技术(RSCE),2012,9(4):41-43,61.
[2] 张 强,陈德旺,于振宇.城市轨道交通ATO系统性能指标评价[J].都市快轨交通,2011,24(4):26-29.
[3] 王鹏飞,樊贵新,王新海,等.城轨车辆在ATO模式下停车精度问题的分析与探讨[J].铁道机车车辆,2011,31(6): 77-79,87.
[4] 王冬雷.地铁车辆电空混合制动平滑过渡问题分析及改进建议[J].电力机车与城轨车辆,2010,33(3):51-52.
Analysis on Parking Inaccuracy of the Metro Train in ATO Mode
WANG Peng
(Guangzhou Metro Corporation,Guangzhou 510000 Guangdong,China)
Parking inaccuracy in ATO mode often occurred in the train of Guangzhou metro line 5 when the passengers are more.This paper analyzes this problem,and find the key reason is that electro pneumatic hybrid braking below 6km/h is not matching well.
ATO;failure;parking accuracy;electro pneumatic hybrid braking
U239.5
A
10.3969/j.issn.1008-7842.2015.01.27
1008-7842(2015)01-0118-03
)男,工程师(
2014-06-04)
