共轴式无人直升机的高度控制系统设计*
2015-05-31黄河科技学院
黄河科技学院 李 慧 王 飞
北京航空航天大学航空科学与工程学院 贺天鹏
无人直升机不需要跑道,机场适应性较强,在飞行中机动灵活,生存力较强[1]。其飞行能力是其他一些飞行器不具备的,它可以执行许多有人驾驶直升机无法完成的任务,既能作为实时情报采集、监视、侦察、通信中继、目标截获及战场管理等军事应用的平台,又可用于民用的电力巡线与架线、地图测绘、交通监控、森林防火、地震灾情探测等事务。因此,国内外近些年都加快了无人直升机的发展速度。
无人驾驶直升机的性能在很大程度上取决于它的飞行控制系统设计,这些性能包括各种飞行性能(起飞着陆性能、作业飞行性能)、飞行安全可靠性、飞行可监控性、系统可操纵性和可维护性,以及人机接口任务设置的友好性等[2]。从无人直升机执行的任务来看,将其保持在给定高度上飞行是非常必要的。因此,用于无人直升机的飞行控制系统一般具有高度保持通道,用于控制、稳定直升机的飞行高度。
本文在常规直升机[3]与其他飞行器飞行高度控制稳定方法[4-6]的基础上,针对共轴式无人直升机高度控制稳定的特殊性,设计了一种共轴式无人直升机的高度保持系统,它使该共轴式无人直升机在自主稳高模态飞行时能自动到达并稳定在给定的飞行高度,系统设计中考虑了多方面因素:(1)设计了低高度信号产生电路,它使系统可以在无线电高度参数和气压高度参数之间根据需要自动进行切换,并将切换高度设置成两个,可以减少由于气动干扰或地形高低的变化所引起的系统在两种高度参数之间的频繁切换。同时,当无线电高度表损坏时可以自动切换到采用气压高度参数。(2)在控制规律中计入了高度差、速度差的积分环节,可以减少直升机在给定高度上下的波动,使直升机能更快地稳定在给定的飞行高度。(3)在控制规律中计入了“航向补偿”,可以减小航向操纵对共轴式直升机升力的影响。(4)在自动升降过程中加入了限幅,可以自动限制升降速度,保证直升机不进入涡环状态。(5)设计了总距跟踪电路,可以减小飞行控制模态切换对系统的冲击。综合的设计考虑使该共轴式无人直升机在飞行试验中的高度保持效果良好。
1 系统框架与配置
1.1 系统框架
该系统的框架结构及原理如图1所示。
该系统由无线电高度计、大气数据机、设计的稳高线路板和总距舵机4大部分组成。它们之间的位置连接关系为:设计的稳高线路板安装在自动驾驶仪盒子中,自动驾驶仪盒子、无线电高度计和大气数据计算机安装在直升机的设备架上,总距舵机安装在直升机传动系统的舵机架上,无线电高度计和大气数据计算机的输出端分别通过电缆连接到设计的稳高线路板的输入端,而设计的稳高线路板的输出端则通过电缆连接到总距舵机的输入端。

图1 系统框架及原理Fig.1 System framework and principle
1.2 系统配置
该系统采用BG-T小型无线电高度计实现低高度测量,它所测数据为无线电高度和升降速度,其输出为0~12V的高度模拟电压和-10~+10V的速度模拟电压,测高范围为0~300m,升降速度测量范围为-10~+10m/s。该高度计采用调频连续波、固定差频、闭环自动跟踪体制(图2)。

图2 无线电高度计结构原理Fig.2 Structure principle of radio altimeter
压控振荡器(VCO)产生的调频连续波,经发射天线发射至地面,再反射回接收天线。在线性锯齿波信号调制情况下,发射信号的调制周期T可表示为:

式中,ΔF为发射信号的调制宽度(频偏),ΔF=120.96MHf b为发/收信号混频后的差拍频率,+2H/C),为发/收信号的延迟时间,由设备安装延时Ti和飞行高度的延时2H/C决定;Ti为设备安装延时,取决于直升机在零高度收发机连接天线的电缆,安装后为固定值;H为飞行高度;C为电磁波在空气中的传播速度。
由式(1)可知,通过测量调制周期,便可获得与之成比例的飞行高度信息:

采用XSC-13B小型大气数据计算机(如图3所示),所测数据为气压高度和气压升降速度,其输出为-0.667~+10V的气压高度模拟电压和-10~+10V的升降速度模拟电压,测高范围为-400~6000m,升降速度测量范围为-10~+10m/s。
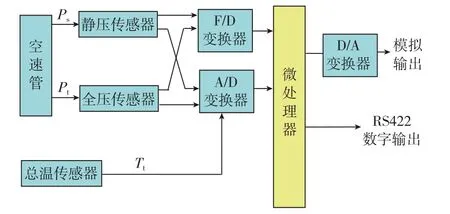
图3 大气数据计算机结构原理Fig.3 Structure principle of air data com puter
该大气机受到来自GKY-26空速管的大气静压Ps和全压Pt,大气机中的硅谐振型压力传感器输出与静压和全压成比例的频率信号,经F/D变换器,送入微处理器。此外,压力传感器还输出温度模拟信号,经A/D变换器也送入微处理器,以对压力数据进行温度修正。同时,大气机还接收来自外部总温传感器输出的大气总温信号,其经A/D变换器也送入微处理器。以上压力和温度数据在微处理器中按照大气参数方程进行有关大气参数,即气压高度、真空速和升降速度的实时解算与输出。
设计的稳高线路板是该系统的关键技术部分,它安装在自动驾驶仪盒子当中,输入端采集无线电高度计或大气数据计算机传输过来的高度与升降速度数据,输出端则将最终得到的总距控制量传送到总距舵机。该线路板采用模拟电路设计,包含4项功能电路:(1)低高度信号产生电路;(2)数据采集与融合电路;(3)自主稳高控制规律计算电路;(4)总距跟踪与综合电路。其中,数据采集与融合电路实现、自主稳高控制规律计算电路实现以及一些综合电路实现都是现有许多集成电路研究中常见的[7-10],所以后面只对该系统稳高线路板的几个关键性技术及两个关键电路实现进行详细介绍。
总距舵机采用70LCX-1稀土永磁式直流力矩测速机组,并加入相应的舵机驱动控制电路组装而成。它的功能是通过自动倾斜器带动变距拉杆改变旋翼的桨距,从而改变旋翼的拉力,以达到稳定直升机飞行高度的目的。
2 系统工作原理
2.1 自主稳高系统的控制流程
系统采集无线电高度计与大气数据机输出的高度与升降速度参数,以及地面控制站发出的给定飞行高度,由低高度信号进行判断,是用无线电高度参数,还是用气压高度参数;按设计的自主稳高控制规律,将采集到的高度、升降速度与给定飞行高度代入进行计算,得到自主稳高的控制电压Vz。当直升机进入自主稳高飞行模态,Vz加上航向补偿即为总距舵机的控制量δH,以该控制量驱动总距舵机可以改变旋翼的桨距,从而改变旋翼的拉力,最终达到稳定直升机飞行高度的目的。
2.2 自主稳高控制模态与遥控模态的切换
自主稳高向遥控模态切换:观察地面遥测的总距对表值,当遥控电压与自主稳高控制电压基本相等时,可操纵总距操纵杆进行切换。
遥控向自主稳高模态切换:自主稳高控制电压通过“总距跟踪电路”始终跟随遥控电压,故只要直升机接收到地面控制站发出的“自主稳高/遥控模态切换”指令,即可很平稳地切换到自主稳高模态,继而控制直升机自动到达并稳定在给定高度上飞行。
3 系统关键技术
3.1 低高度信号产生及两种高度参数之间的切换
无线电高度参数与气压高度参数间的切换,由设计的低高度信号产生电路采集直升机的无线电高度参数来控制。低高度信号产生电路原理图如图4所示。
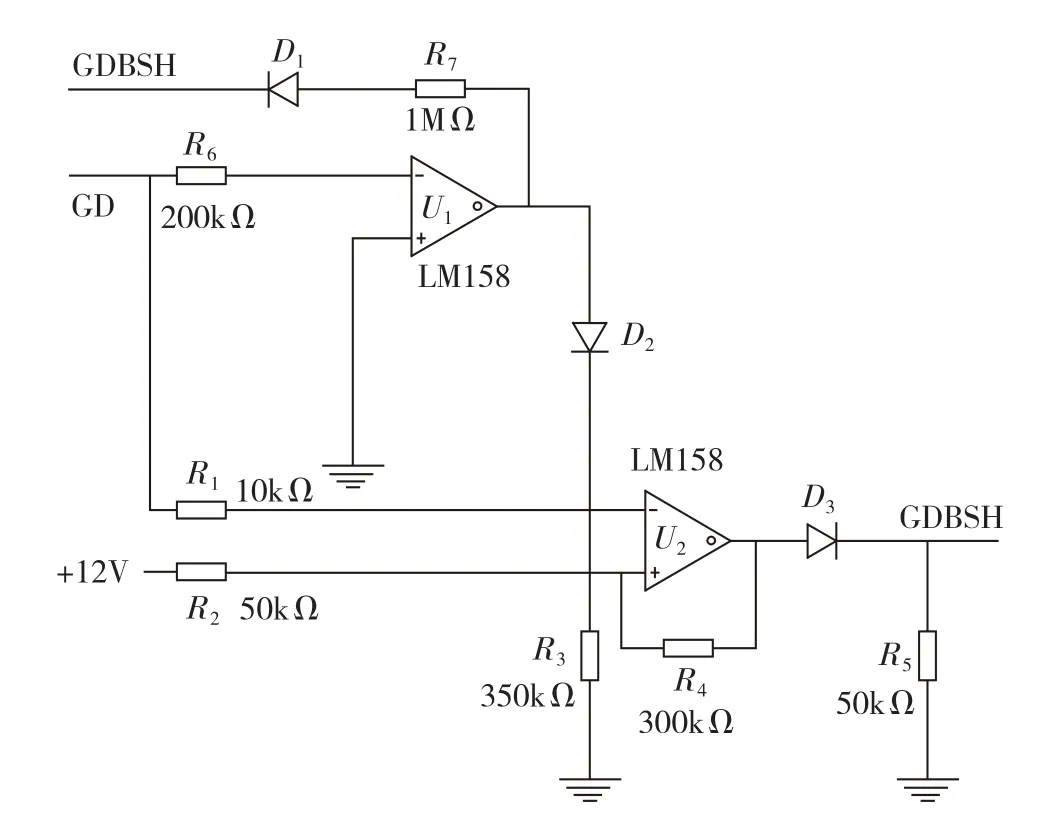
图4 低高度信号产生电路原理Fig.4 Circuit principle schem aticsof generating low height signal
该电路由由两个运算放大器U1、U2,7个固定电阻R1、R2、R3、R4、R5、R6、R7和3个二极管D1、D2、D3组成。电路连接方式为:D1、R7并联后与U1的反相端连接,U1的输出端与反相端之间接入电阻R6组成反相加法运算电路。D2、R1并联后与U2的反相端连接,U2的输出经电阻R4接到U2的同向端,电阻R3接在U2的同相端和地之间,电阻R2接在U2的同相端和+12V之间,U2的输出端经D3输出低高度信号,电阻R5接在输出的低高度信号与地之间,用于拉高输出电压。
当U2的反向端(无线电高度参数由GD端经R1输入)电压小于同向端电压时,输出端电压为正饱和电压E+,DGDXH端输出的低高度信号为高电平,稳高系统使用无线电高度参数。反之,输出端电压为负饱和电压E-,DGDXH端输出的低高度信号为低电平,稳高系统使用气压高度参数。
开始直升机高度较低,U2的输出端输出E+,此时U2的同向端电压较大:

式中,R是图4中R2、R3、R4的并联电阻。当直升机高度高于切换高度时,U2的输出端输出E-,此时因E-是负电压,所以U2的同向端电压较小:

选定合适的电阻阻值,就可使:V+max= 11V(对应高度为H2=275m时经由GD端输入的电压);V+min= 8V (对应高度为H1=200m时经由GD端输入的电压)。
如果无线电高度计出故障,则GDBSH端电压为-15V(平时为零),U1会输出E+,大于V+max,此时,DGDXH端输出的低高度信号为低电平,稳高系统就使用气压高度参数。
设定直升机飞行中高度参数选择的两个切换高度为H1<H2,则直升机高度低于H1时,低高度信号为高电平,系统使用无线电高度参数;高于H2时,低高度信号为低电平,系统使用气压高度参数。
直升机在H1~H2之间使用何种高度参数稳高,与此前直升机的高度状态有关。当直升机由低于H1处上升时,要超过H2,系统才会转用气压高度参数;从超过H2处下降时,要低于H1,系统才会转用无线电高度参数。这样,因为直升机升降速度的限制,即使发生较大的气动干扰或地形高低的变化,直升机在无线电高度参数和气压高度参数间的切换周期也会超过30s,避免了频繁切换的问题。
3.2 稳高控制规律计入航向补偿
由式(5)~(7)可见,该系统的稳高控制规律中考虑了“航向补偿”,这样可以减小航向操纵对共轴式直升机升力的影响。另外,还计入了高度差、速度差的积分环节,可以减少直升机在给定高度上下的波动,使直升机能更快地稳定在给定的飞行高度。
遥控工作模态时,控制规律为

自主稳高控制模态时,在低高度时控制规律为

在高高度时控制规律为

其中,δH为总距舵机控制量;δy1为航向舵机控制量;VH为总距遥控值;KH为总距遥控值的传动系数;KHy为总距对航向的补偿系数;KΔ为高度差与升降速度的比例系数;Kωy1为偏航角速度传动系数1;ΔHR为相对给定高度的无线电高度差(HRg-HR);HR为无线电高度表提供的高度(无线电高度);HRg为给定相对高度;HRV为无线电高度表提供的升降速度(无线电升降速度);ΔHB为相对给定高度的气压高度差(HBg-HB);HB为大气数据计算机提供的高度(气压高度);HBg为给定气压高度;HBV为大气数据计算机提供的升降速度(气压升降速度)。
3.3 最大升降速度限制与高度调节
计算总距舵机控制量时,需对高度差进行限幅,上升时高度差的最大限幅值是165m,对应6.6m/s的上升速度。当高度差超过165m时,如果上升速度大于6.6m/s,则总距舵机控制量的变化将使总距减小,上升速度减慢;如果上升速度小于6.6m/s,则总距舵机控制量的变化将使总距增大,上升速度加快。也就是说,当高度差超过165m时,系统将使直升机的上升速度稳定在6.6m/s。
直升机下降时,最大限幅值为75m,对应的最大下降速度为3m/s。
如果高度差小于165m,则相应的上升速度的稳定值也变小,当高度差为零时,如果升降速度大于零,则总距舵机控制量的变化将使总距减小,使上升速度减小;如果升降速度小于零,则总距舵机控制量的变化将使总距增大,使上升速度增大。总之,当高差为零时,系统也将使升降速度为零。通过这样的调节,达到使直升机的飞行高度稳定在给定值附近的目的。
3.4 总距跟踪电路
高度保持系统从遥控模态切换到自主稳高模态时,为了减小切换对系统的冲击,在切换的瞬间,要求稳定高度通道经由U2输出端输出的电压应等于遥控电压给出的总距舵机控制量,因此设置了原理如图5所示的总距跟踪电路。

图5 总距跟踪电路原理图Fig.5 Circuit principle schematics of total distance tracking
该电路由两个运算放大器U1、U2,5个固定电阻R、R1、R2、R3、R4、1个电容C和两个继电器J1、J2组成。电路连接方式为:继电器J1的X经过电阻R1接到VH端,继电器J1的Y经过电阻R接到VZ端,继电器J1的O与U1的反向端相接,U1的输出端经过电容C接到U1的反向端,U1的输出端经串联后的R1和R2接到VH端,U1的输出端经电阻R3接到U2的反向端,U2的输出端与反相端之间接入电阻R4组成反相加法运算电路,U2的输出端与继电器J2的Y相接,继电器J2的X接到VH端,继电器J1的O接到δH端。
图5中:R2/R1=R3/R4,T1=R2C。J1和J2是一个继电器的两个转换触点,O-X接通时,系统处于遥控模态,遥控电压经O-X去控制δH,此时,U2O的输出电压:Vo=VH/(1+T1S);在遥控电压VH变化的时间常数大于T1时,有Vo≈VH。
O-Y接通时,系统处于自主稳高模态,自主稳定高度的控制电压经O-Y去控制总距舵机控制量,驱动总距舵机使得直升机稳定在给定高度。
4 结论
该系统设计考虑了多方面的因素,加入了低高度信号产生电路,使系统可以在无线电高度参数和气压高度参数间根据需要自动切换,并将切换高度设置成两个,减少了由于气动干扰或地形高低的变化所造成的系统在两种高度参数间的频繁切换。同时,当无线电高度计损坏时可以自动转换到使用气压高度参数,并在控制规律中计入了高度差、速度差的积分环节,减少了直升机在给定高度上下的波动,使其能更快地稳定在给定的飞行高度。考虑到航向操纵对共轴式直升机升力的影响很大,对稳高系统进行了“航向补偿”。另外在自动升降过程中加入了限幅,可以自动限制升降速度,保证直升机不进入涡环状态。系统中还设计了总距跟踪电路,可以减小控制模态切换对系统的冲击。
多次飞行试验的实践证明:该系统对共轴式无人直升机飞行高度的保持有很好的控制效果,能满足实际工程要求。
[1] 无人驾驶直升机特点简介. 北京航空航天大学学报,1996,22 (3) : 336.
[2] 宋子善,沈为群. 无人直升机综合飞行控制系统设计. 北京航空航天大学学报,1999,25(3): 280-283.
[3] Srikanth S,Gaurav S S. Landing on a moving target using an autonomous helicopter. Field and Service Robotics,2006(24):277-286.
[4] 王立文,郑宇. 飞行模拟机高度保持仿真系统构建. 电光与控制,2009,16(10): 66-69.
[5] 陈慧,杨新,周江华. 高空飞艇高度保持控制器设计. 航天控制,2009,27(2): 56-61.
[6] 蔡开泉,张军,张学军. 高空空域飞机高度保持性能分析.航空学报,2009,30(4): 726-731.
[7] 李祥臣. 通用模拟电路. 北京: 中国计量出版社,2001.
[8] 王昆玉. 直升机飞行控制系统. 北京: 航空工业出版社,1991.
[9] 杨一栋. 直升机飞行控制. 北京: 国防工业出版社,2007.
[10] 吴森堂,费玉华. 飞行控制系统. 北京: 北京航空航天大学出版社,2005.
