基于三维模型的装配工艺参数化仿真技术研究
2015-05-31中航飞机西安飞机分公司侯卓兵何其昌
中航飞机西安飞机分公司 侯卓兵 何其昌
数字化技术是改变传统的飞机设计与制造模式、缩短飞机生产周期并降低生产成本、提高飞机生产质量的重要技术手段。以波音为主的世界先进航空企业引领数字化技术在航空业应用的潮流,提出的基于MBD技术的产品定义方式于2003年成为美国机械产品工程模型定义的国家标准。事实上,波音2004年启动的787项目研发过程就是MBD技术的应用与推广过程,大大促进了航空行业数字化技术的应用[1-2]。目前,国内主要飞机制造企业在飞机数字化设计方面发展较快,很多型号设计已经采用了全三维的数字样机,制造、装配工艺规划的数字化也取得了很大进展[3]。
我国大型客机的研制阶段也采用MBD技术,已经实现了产品的全三维数字化定义,并已经尝试采用基于MBD单一数据源的数字化装配工艺设计,目前已经形成了原型系统。该原型系统基于达索DELMIA软件平台,在DELMIA/DPE模块中通过装配工艺结构模板进行装配工艺规划,然后通过DELMIA/DPM模块进行装配仿真验证,最后通过3DVIAComposer进行工艺文件发布[4-5]。
与传统的装配工艺设计相比,基于MBD的装配工艺设计是以三维产品模型为中心,需要一种“以三维模型为中心”的装配工艺模型,这是目前基于MBD的装配工艺设计研究的一个主要方面,主要包括工艺结构模板的定制、工艺设计过程控制、工艺信息输入等。工艺部门开展工艺规划的主要依据只有MBD数据集,与传统工艺设计二维工程图纸为主、三维数模为辅的方式完全不同,需要建立MBD数据集自动更新机制、工艺活动的表达、工艺信息的三维可视化表达等,它们是基于MBD的装配工艺设计研究的第二个方面。另外一些与应用密切相关的共性技术也是构成基于MBD的装配工艺设计研究的重要组成部分,其中包括标准装配工艺的建立、三维虚拟装配的自动化仿真、装配指令的启发式生成等,主要目的是提高工艺规划的效率。由于装配自动化仿真技术是众多应用的核心支撑技术,所以本项目对其进行深入研究。
在基于MBD的装配工艺设计过程中,三维装配仿真技术是装配工艺模型重要的设计、验证与优化手段,其主要作用有:(1)装配顺序仿真,主要验证零件装配顺序的合理性;(2)装配干涉仿真,主要验证工装、工具等设计合理性以及零件装配路径的合理性;(3)装配对象仿真,主要检验零件与工装是否缺少或者冗余。从这可以看到,三维飞机装配工艺设计的效率与装配仿真的效率密切相关,而在目前的系统中,其装配工艺仿真基本上在DELMIA/DPM软件环境中手工设置,仿真问题的发现也需要工艺工程师的经验,尤其是其虚拟人动作设置过程繁琐,造成目前的装配工艺设计效率较低,也没有完全发挥三维装配仿真的作用。
综上所属,研究基于MBD的装配工艺设计中的虚拟装配自动化仿真技术具有现实的理论意义和应用价值,是提高工艺设计效率、充分利用三维模型进行工艺设计的关键技术。本研究中,装配仿真的自动化涉及到装配工艺的表达与解析方法、工艺活动的建模、虚拟人动作建模方法以及仿真结果评估等相关技术。
面向操作仿真的装配工艺信息模型
要实现装配操作仿真的自动化,需要建立面向装配仿真的标准装配工艺信息模型,实现从模型表达上就支持装配操作动作仿真,因为装配仿真中自动约束识别算法随着零件形状的复杂程度增长而急剧增长,难以快速自动捕捉装配约束关系。采用语义进行装配工艺的描述被认为是解决这一问题的有效方法,因为装配工艺指令本身就是通过自然语言来描述的,所以本研究中采用语义抽象方法建立装配工艺信息模型与标准化。装配语义是对装配零部件间装配关系的抽象表达,蕴含了装配零部件间的约束个数和类型、约束顺序以及工程约束和2个装配对象(零件或部件)。首先对飞机装配工艺进行整理,分析零部件间存在的约束,一般包括定位约束和工程约束2种。语义从顶层可以分为铆钉联接、焊接联接、螺纹联接语义、键槽配合语义、轴孔配合语义、平面定位语义、传动语义、特殊语义等。另外通过定义基本语义与复合语义来描述所有装配关系,其中基本语义只包含1个基本定位约束,不包含任何工程约束的语义,而复合语义则包括多个定位约束。
在装配语义提炼与抽象的基础上,建立面向操作仿真的工艺信息模型,包括零件模型、装配树模型、约束模型、语义模型4部分,见表1。约束的类型属性表达了约束属于何种类型,一般的基本几何约束类型分为7种:面贴合、面对齐、线对齐、重合、定角、相切和坐标系等。约束定义在2个零件的几何元素之间,组成属性描述这2个零件及相应几何元素的识别信息。结合飞机装配工艺,语义类型中包含铆钉联接、螺钉联接、螺栓联接、焊接、胶接等。针对每种语义类型,分别确定其约束信息,装配层次信息。

表1 装配工艺信息模型
基于MBD技术的MBD数据集包含了大量的与产品数字定义、工艺设计、工装设计、仿真、检验等有关的数字化信息,但这些信息对于虚拟维修而言并不都是必需的,需要根据维修机构对航空装备维修的实际需求配置、定制需要的数据集,剔除不会被用到或极少被用到的那些数据。
国际标准STEP-AP214原来只包含产品信息,主要针对汽车行业,但近年来已扩展包含工艺与资源信息,形成为国际标准ISO10303-214。ISO10303-214作为通用的工艺信息表达模型,可以有效表达工序、资源分配等,本研究也采用该标准建立装配工艺的静态表达模型,见图1。
ISO10303-214采用EXPRESS语言来定义与描述STEP的应用参考模型(Application Reference Model,ARM)。EXPRESS是图形化的语言,是UML(Unified Modeling Language)语言的前身。基于ISO10303-AP214描述的工艺模型可以采用XML语言进行存储,从而在模型的解析上可以利用XML的相关技术。采用XML规范建立维修信息描述模型。XML能够以人和机器可识别的方式记录文件信息,具有良好的跨平台数据交换能力。本文用结构化的XML格式描述变量。
装配工艺操作的动态映射机制
动态工艺模型拟采用分层次Petri网进行描述,Petri网是离散事件建模的有效工具,是由节点与弧组成的有向图。在Petri网中,库所表明了“状态”,而变迁刻画了状态的“变化”,变迁的启动由其启动规则来进行控制。Petri网模型采用图形化的方式描述工序以及对共享资源的需求机制,通过对描述工艺活动的Petri网进行分析,可以分析工序之间对资源规划的合理性。考虑到飞机装配工艺的复杂性,根据装配层次关系,拟采用分层Petri网来建立动态工艺模型,描述装配活动。
Falkman等[6]采用过程代数结合Petri网来实现描述工艺动态模型,过程代数用来描述工艺的同步、工序、选择等工艺逻辑现象,能有效描述工艺活动,满足动态工艺建模的需求。本研究在此基础上,将ISO10303-AP214标准描述的静态工艺模型按照表2所示的方法进行映射,结合过程代数操作,将其转化成Petri网描述的动态工艺模型。

表2 工艺模型映射关系
利用基于Perti网的动态工艺模型对装配工艺过程进行了描述,按照工艺信息模型的装配数表达的装配工艺活动层次,可分别映射为相应层次的Petri网模型,从而组成分层次的Petri网动态工艺模型。
装配指令动作的参数化建模
在动画仿真领域以及人工智能领域,为了实现虚拟场景中的角色,特别是虚拟人能够理解自然语言进行自主化、智能化动作,大多采用参数化的动作表达模型。以美国宾州大学的Balder[7]等为代表,结合美国军方的DEPTH项目以及AnimNL项目,采用参数化动作表达直接将以自然语言描述的维修工作步骤转换为动作指令,并通过Jack人体建模软件进行人机维修动作的可视化。本研究在Balder等研究基础上,结合语义描述的装配工艺指令,通过对Petri网动态工艺模型的解析与工艺信息模型,研究分层参数化动作描述方法:首先,对自然语言描述的装配工艺进行分层,比如铆接工艺就包含一系列的工步,每一工步对应相应的人体动作。按照Petri网描述的工艺动态模型,对工艺信息模型进行解析,将其转化为相应的人机动作描述指令,每条动作描述指令包含如下信息: 角色对象、执行对象、动作执行满足条件、执行动作的环境、空间条件和执行方式虚拟人的属性(如手臂空间、视觉空间、力量大小等)及该动作包括的子动作等。工步的实现包含一系列动作,通过对动作进行分解,可以定义一些基本动作(如移动、抓取、伸手等),建立基本动作库,当上层动作执行时可以调用这些基本动作,从而实现动作的复用,提高设置效率。结合DELMIA/Human人体模型库,实现虚拟人装配动作仿真。人机仿真过程中,当有操作空间、操作姿势、操作路径不满足设定的参数时,系统可以自动进行错误报告,提示工艺人员进行装配工艺的调整。
紧固件的拆装动作是装配过程中最普遍和最频繁的装配动作,本文主要对紧固件的装配动作进行参数化建模。通过修改模型参数,以生成适应特定应用场景的装配动作。由于不同紧固件操作特点有所区别,因此不同紧固件同一种装配动作的,参数化模型一般也不相同。工程上常见的紧固件主要分为3类:P1指螺母类,包括六角螺母、方螺母等;P2指螺栓螺钉类,包括六角头螺栓、方头螺钉等;P3类包括各种铆钉及定位销等。本文分别对上述3类紧固件的装配动作进行参数建模。此外,紧固件的拆装过程中,操作者的动作和紧固件本身的工程属性密切相关,例如螺距、螺纹长度等。P1和P2类紧固件的装配动作主要包括:旋入(Screw)、旋出(UnScrew)、拧紧(Tighten)、拧松(UnTighten)。Screw指操作者旋入P1和P2到指定位置所包含的人体动作;UnScrew指操作者旋出P1和P2包含的人体动作;Tighten指操作者使用工具拧紧P1和P2所包含的人体动作;UnTighten指操作者使用工具拧出P1和P2所包含的人体动作。P3类紧固件的装配动作主要包括插入(Insert)和敲打(Beat),即操作者将使用工具重复敲击P3类紧固件所包含的人体动作。
P1、 P2和 P3类紧固件的装配动作基本参数如图2所示。AS为紧固件的中心轴线向量;PA和PB为被紧固的2个零件;为P1和P2紧固件的螺距;分别表示P类紧1固件旋入和旋出深度分别表示P3类紧固件的总长度及插入深度;、、分别表示P类紧固件螺纹2长度及旋入和旋出深度。
P1类紧固件装配的流程:首先操作者VO按照预定的旋入深度l1P1徒手将P1旋入到对应的螺栓或螺钉上,然后使用拧紧工具T沿轴线AS将P1完全拧入,直至P1与PA刚好发生干涉为止。P1拆卸一般可划分为3种方式:(1)操作者VO使用工具 T将P1沿轴线AS拧出,直至P1与其对应配合的螺栓或螺钉刚好不发生干涉为止;(2)操作者VO使用工具T将P1沿轴线AS拧出,拧出深度为l2;然后徒手将已经拧松的紧固件P1沿轴线AS旋出,直至P1与其对应配合的螺栓或螺钉刚好不发生干涉为止;(3)操作者VO徒手将P1沿轴线AS旋出,直至P1与其对应配合的螺栓或螺钉刚好不发生干涉为止。
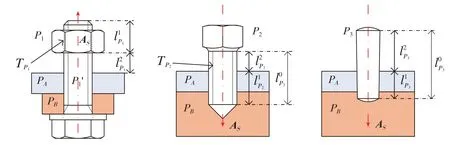
图2 典型紧固件主要参数描述
根据上述P1类紧固件的拆装操作流程分析,其装配动作的参数化模型定义如下:

式中,VH & P1表示在旋入或旋出操作过程中,虚拟手已抓取P1紧固件;VH & T表示在拧松或拧紧操作过程中,虚拟手已抓取相应的工具;RA指每次操作紧固件旋转过的角度,它取决于装配空间以及操作者关节的生理角度; v是装配动作的仿真速度,通过设置它的大小可调节装配动作的快慢;Screw、UnScrew、Tighten和UnTighten表示P1类紧固件装配动作的具体生成方法,将上述方法的参数输入到对应的方法中,则自动生成该装配动作的虚拟人装配操作姿态序列及操作对象的装配关键点序列,由前文操作过程信息模型的定义,旋入或拧紧动作的装配操作序列表达如下:

式中有2层含义,首先,表示装配动作仿真过程中虚拟人操作的初始姿态,其次,表示操作完成后,虚拟人又回到初始的姿态。{,···,}为虚拟人的中间装配操作姿态序列;,··}为操作结束后回到初始状态的装配姿态序列。(m+1)反映了虚拟人为完成动作所需要进行重复操作的次数,例如:旋入螺栓,则表示旋入次数;敲击定位销,则表示敲击次数。···,则表示装配动作中P1的装配关键点序列,与虚拟人装配操作姿态一一对应;···,··为拧紧装配动作过程中操作工具的装配关键点序列。
旋出和拧松动作完成后,通常不需要回到初始初始状态,旋出和拧松动作完整的装配操作序列略有不同,定义如下:

结束语
虚拟装配技术已广泛应用在航空产品设计与制造中,虚拟人操作仿真与评估是众多应用的核心支撑技术。为了提高装配指令虚拟仿真的效率与准确度,满足并行装配设计的需求,本文通过对飞机典型装配工艺元素的分析,建立面向操作仿真的包含装配语义的装配工艺信息模型;并建立映射机制,将静态工艺信息模型自动转换为动态装配操作模型;同时以紧固件操作为例,建立了人机装配动作的参数化驱动方法,进而改变目前手工进行工艺仿真逻辑设置的模式,提高人机装配仿真的效率。
[1] 卢鹄,韩爽,范玉青. 基于模型的数字化定义技术.航空制造技术,2008(3):56-59.
[2] 周秋忠,范玉青. MBD技术在飞机制造中的应用.航空维修与工程,2008(3):55-57.
[3] 冯廷廷,金霞,李汝鹏,等. 基于MBD的飞机装配工艺模型设计.航空制造技术,2010(24):95-98.
[4] 陈文亮,安鲁陵,卢鹄,等. 基于定制模板的飞机装配工艺设计.航空制造技术,2011(7):26-29.
[5] 刘振宇,谭建荣,张树有. 基于语义识别的虚拟装配运动引导研究.软件学报,2002,13(3): 382-389.
[6] Falkman P. Automatic generation of object models for process planning and control purposes using an international standard for information exchange. Systemics,Cybernetics and Informatics,2003,5(1): 12-18.
[7] Baler N I. A parameterized action representation for virtua l human agents.Cambridge,MIT Press: 2000.
[8] M i Z,Yang J,Abdel-Malek K.Optimization-based posture prediction for human upper body. Robotica,2009,27(4): 607-620.
