基于ADAMS的机床机械手动力学仿真研究
2015-05-30魏书平等
魏书平等


摘 要:文章以某企业自动化上下料机床机械为研究目标,构建了简化的机床机械手模型,然后把该模型导入到ADAMS进行后续的约束和驱动添加,从而获得机械手的虚拟样机。并通过运动仿真模拟了机械手关节的运动曲线,结果表明所建立模型正确性与合理性,为后续研究奠定了基础。
关键词:机床机械手;ADAMS;动力学仿真
在现今的高端智能装备制造业中,机器人(机械手)是一种极其重要的智能化装备。机器人的诞生将使生产率得以显著提高、工作环境得以改善等。所以对机器人的研究意义非凡。许多国内外学者已在机械手控制、设计等相关方面做了大量的研究工作[1-5]。基于ADAMS软件,文章对机床机械手动力学进行仿真,仿真结果表明所构建三维模型合理性及正确性,为为后续研究奠定了基础。
1 应用背景及功能分析
从某企业的实际出发,分析机床机械手完成的功能如下:机床机械手将毛坯件从物料板或者物料箱中取出,放置于机床A中,将机床A加工好的机械手放置于机床B中,将机床B加工好的零件取出,放置到成品车上,完成一个循环。
2 基于ADAMS的机床机械手动力学仿真
2.1 模型构建
在ADAMS中构建复杂的三维模型比较困难,因此,在保证功能的前提下,首先构建了简化的机床机械手模型,如图1所示。
2.2 动力学仿真分析
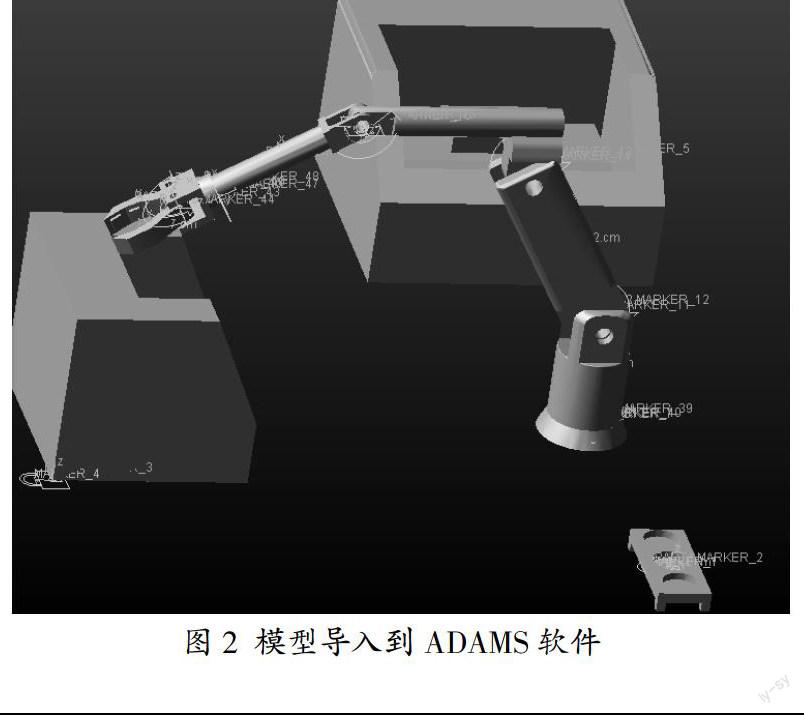
将三维模型导入到ADAMS中,将相应的运动副约束和驱动约束添加到模型中,如图2所示。
经仿真后得到机械手各关节位移变化的曲线(图3)、各关节力变化的曲线(图4)、各关节角加速度变化的曲线(图5)。
从仿真结果可以看出,机械手的各个关节的运动比较平稳,角位移、角加速度和关节力的变化曲线变化比较平缓,由此证明了所设计的机床机械手结构是比较合理的。
3 结束语
通过对机床机械手的运动学仿真分析,使机床机械手的整个运动功能直观,同时得到了各关节的驱动力、各关节的位移、角加速度变化曲线。该结果可以为机械手的轨迹控制与规划提供基础;另外,通过仿真可以带来设计过程的简化、开发费用的减少、设计周期的缩短等诸多好处,并为下一步机械手的智能控制提供了一定的参考。
参考文献
[1]黄金风.MSRS和ODE环境下POWERCUBE模块化机械手的仿真研究[D].大连:大连交通大学,2010.
[2]张明辉,禚宝海.Diamond并联机械手动力学仿真的Simulink实现[J].山东科技大学学报:自然科学版,2010,29(1):90-94.
[3]刘淑英,张明路,韩慧伶.五自由度机械手动力学分析与仿真[J].河北工业大学学报,2009,38(2):32-36.
[4]Muller A, Hufnagel T. Model-based control of redundantly actuated parallel manipulators in redundant coordinates. Robotics and Autonomous Systems, 2012, 60(1):563-71.
[5]王霞,李占君,王平.基于ADAMS的六自由度机械手的运动仿真分析[J].矿山机械,2010,38(8):28-31.
作者简介:魏书平,女,安徽工程大学本科生。
