高速公路场景下基于跨层协作的车载自组织网络路由协议
2015-05-30张欢
张欢

【摘要】 本论文介绍了一种高速公路场景下基于跨层协作的车载自组织网络路由协议(CCR),着重介绍了针对消息不同的优先级的跨层协作与分发机制,该路由协议利用了车辆的地理位置和速度信息,并保证了1)车联网中不同类型消息具有不同的QoS要求;2)跨层协作的自适应路由机制。最后,本论文应用NS3网络模拟软件和ViSSIM交通流仿真软件,对CCR协议进行仿真。结果表明,CCR路由协议较其他路由协议性能有较好的性能表现。
【关键词】 高速公路 跨层协作 自适应
车载自组织网络(Vehicular Ad hoc Network,VANET)是移动自组织网络(Mobile Ad hoc Networks,MANET)的一个新兴研究分支,基本思想是在一定通信范围内的车辆可以相互交换各自的速率、位置等信息,并自动建立一个移动的网络。在VANET中,利用大规模计算和无线网络通信,可以实现车辆与车辆之间(Vehicle to Vehicle, V2V),车辆与路边基础设施之间(Vehicle to Infrastructure,V2I)的多跳无线通信,并为车辆提供了各种安全应用(如碰撞预警、协助交通管理等)以及非安全应用(如路况指示,娱乐等)。
一、研究背景
在车联网中,路由协议的优劣和自适应程度,直接影响了网络中的整体性能。由于VANET对于路由协议的研究并没有给出一个标准或是研究方向,路由的设计还是一个很开放的课题。它们在发现路由、建立路由以及通信的初期阶段往往有不错的性能表现,但随着节点的移动,网络拓扑的快速变化导致路由链路的断裂,性能往往会急剧下降。随着车载全球定位系统(Global Position System,GPS)的广泛运用,借助GPS获取的地理位置信息而设计的位置路由(Geographic Routing,GR)逐渐发展起来。由于重大交通事故发生的场合主要是在高速路上,所以如何保证高速公路上安全消息的可靠传递显得至关重要。一个好的路由协议的使用,保证数据传输的成功率和时延要求,并控制整个网络的负载开销,才能保证应用能够稳定可靠的实现。但是传统的车联网分层结构对路由协议的设计,仅仅依靠单一层次,很难在各种变化的网络环境下达到安全消息极其严格的传递要求,有必要采用跨层设计,上层协议必须与下层进行有效的状态信息交互以配合分配好网络资源,满足实时性和可靠性的要求。本文在此基础上本文提出了一种跨层的结构设计,用以满足车联网信息传输中实时性和可靠性的要求。
二、CCR算法设计
根据车联网中不同的通信需求所需的Qos不同,车联网中的消息可以划分为2个等级(1和2):等级越高,表示对Qos的需求越高,消息的优先程度也就越高。
首先,在车联网中,不同的消息种类对通信提出了不同的需求,对于高优先级消息(优先级为2的消息),如车辆碰撞预警、防追尾等,这类消息往往与交通安全甚至人生安全息息相关,因此,实时性对于这类消息至关重要,需要进行快速、可靠的分发。但对于低优先级的消息(优先级为1的消息),如位置导航、地图下载、车载娱乐互动等消息,这类消息对实时性的要求并没有像高優先级消息那样苛刻,因此,只需尽力传输即可。基于跨层协作的路由协议(CCR),通过传输层与网络层的协作,根据不同的优先级,选择不同的路由策略,从而保证了消息能够得到适当的处理。
CCR转发机制
(1)需要发送消息的源车辆节点的应用层产生一个message,并在每个packet中的头部的Destination_Priority字段标记数据包的优先级。按照CCR的优先级分类,可以标记为1或2,等级越高,消息的优先级越高。
(2)邻居车辆节点接收到message后,将该message传输到网络传输层,传输层的分类器通过查询头部的Destination_Priority字段,判断该消息所处的优先级,根据不同的优先级采取不同的转发策略
(3)若Destination_Priority为2,则该packet放入高优先级队列,若队列没有满,则进行洪泛广播,若队列满,则溢出,由于高优先级消息对实时性有很苛刻的要求,所以,队列满后,最后到达的数据包被直接丢弃;若Destination_Priority为1,则放入低优先级队列进行排队,如果该队列满,则进行暂存,最后到达的数据包将会被放入一个缓存池里,待低优先级队列的有空隙时,缓存池里的消息按照先进先出的原则依次进入低优先级队列,排队等待发送。
(4)当高优先级队列和低优先级队列中都有packet时,则高优先级队列中的packet将会被优先发送出去,以确保高优先级的安全消息被及时处理,保证行车安全。
(5)若高优先级队列中无packet,则低优先级队列中按照先进先出的原则发送队列中的数据包,由于在高速公路场景下,优先级为2的数据包发送的概率相比与优先级为1的数据包相对较低,如此,采用CCR既可以保证高优先级的消息可以及时转发,又兼顾了低优先级的消息稳定持续的进行路由。
在本文设计的CCR(cross-layer cooperation routing)协议中,一个基本假设是车联网中的车辆都配有车载射频发射机和接收机,能够通过装载在车辆上的GPS获得自身的位置、速率等相关信息。并且规定了每个车辆节点都需要维护一个邻居节点历史移动信息数据库,同时也必须通过周期性地向邻居节点广播beacon消息来刷新自己的速度信息和位置坐标信息。当节点收到邻居节点广播的beacon消息后,根据时间戳在历史移动信息数据库中更新邻居节点的移动信息。
节点通过周期性广播的beacon消息交换当前所处状态信息,beacon消息所包含的信息如下:<类型,节点ID,生存时间,位置信息,速度信息,状态>,类型指明该消息数据包类型为beacon信息,每一个车辆节点都有其唯一的节点ID,生存时间是数据包存在的时间值,位置信息包含车辆节点的位置(x, y, z),是指其GPS坐标值,速度信息是节点的速度大小v及运动方向?,状态表明该节点是否处于繁忙状态,若有数据包需要转发,则繁忙,否则空闲。
历史移动数据库主要包含以下内容
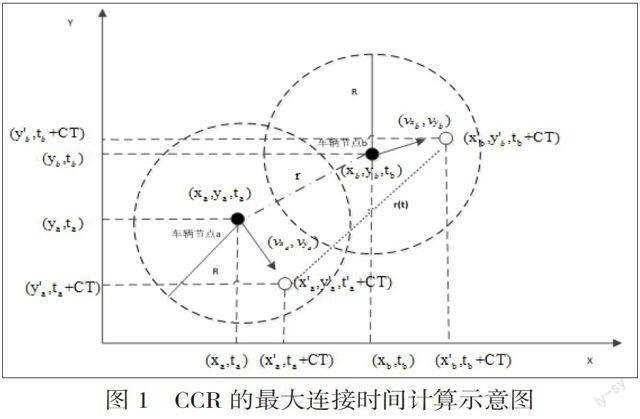
在CCR中,假设车辆的通信范围为R,则在固定通信范围R内的一对节点被认定为处于可连通状态。但由于这两个车辆节点具有不同的行驶速率以及不同的行驶方向,随着两个车辆节点的移动,两个节点的位置也处于相对变化中,在未来的某一时刻,两个节点间的距离将超过车辆节点覆盖的通信范围R,由此,这一对节点变为不连通状態。这一段从可连通状态到不可连通状态的时间预测,即双方连通性的预测。
车辆节点a和车辆节点b相距距离为r。两点有各自不同的位置信息和速度信息。节点a位于(xa,ya,ta)处,移动速度为;节点b位于(xb,yb,tb),移动速度为。这里ta和tb分别表示节点a和节点b位置更新时刻。R为两节点的通信距离。当r小于R时,两节点处于连通状态。t为当前时刻。在短时间内,节点的移动速度变化较小,为计算方便,我们假定车辆节点匀速行驶,即保持匀速行驶。则两节点间距离r是关于时间t的函数r(t)。由于ta和tb并不相同,两节点的位置信息更新时刻不同步,所以需要经过同步修正后使用。经同步修正后,两节点均在ta时刻进行后续计算。
(1)低优先级消息分发机制
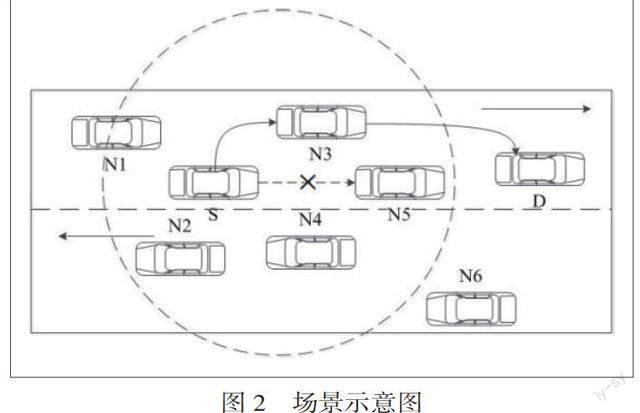
如图2所示,在双向四车道的场景下,节点S有5个邻居节点,分别为N1,N2,N3,N4,N5。在传输层对消息进行分类后,若判定为低优先级消息(优先级为1的消息),则进行如图所示的转发过程,启动贪婪算法选择的结果会试图选择靠近通信边缘的节点作下一跳。这样带来一个问题,处于通信边缘的节点是不稳定状态。如图中节点N5所示情况一样,它即将在短时间内移出之前中继节点的通信范围。而该中级节点无法及时知道这种情况,仍然会选择这个“存在”的节点N5传输,这样,在传输过程中,就会出现持续丢包情况。
低优先级转发算法要求每个节点维护了一个邻居节点历史移动数据库,连通时间由式(6)计算得出,如图中中继节点给出示例。考虑到传统MANET路由信标周期在1S左右,即在1S内邻居节点发送的位置变化,是难以获知的。所以设置CT值可信阈值下线为1S。CT值不足1S的邻居节点将视为不可靠节点,意味着会在短时间内有很高的可能性移出通信范围。
(2)高优先级消息分发机制
在高速公路场景下,车辆能够以较高的期望速率行驶,车流密度相对较小,传输层对数据包的优先级进行分类后,为了能够获得较低的时延,以及较高的可靠性,将高优先级消息(优先级为2)的数据包直接采取洪泛的方式进行广播。由于在高速公路场景下,车辆密度相对较低,采用洪泛广播的方式反而降低了发生广播风暴的可能性,提高了数据包传输的及时性与可靠性。
三、性能仿真及分析
3.1 VISSIM以及NS3仿真工具
VISSIM 是一种微观的、基于时间间隔和驾驶行为的仿真建模工具,不仅可以完善地模拟各种真实的交通场景,还可以生成可视化的交通运行状况,并且以文件的形式输出各种交通评价参数,是评价交通工程设计和城市规划方案的有效工具。
NS3是一个离散事件模拟器,是一款开源软件,由C++编写,C++语言作为前台,可以对网络性能进行仿真,并且能正确地处理节点上的多重接口,使用IP地址,与因特网协议和设计更一致,和更加详细的802.11模块等。
3.2 仿真结果
在仿真实验中,仿真结果展示了车辆在高速公路环境下路由的性能表现,由于我国交通法规的限制,高速公路上车速的限制在60km/h到120km/h之间,本文也据此进行了速率的设定,为了对提出的路由协议CCR进行性能分析,本文利用VISSIM生成交通流模型,并通过NS3仿真软件对路由协议的性能进行了分析。
三个路由协议在高速公路场景下的性能表现,通过仿真结果可以看出,CCR路由协议相比于AODV与GPSR有较高的传输成功率以及较低的端到端延时。这是由于在高速公路场景下,CCR采用了基于跨层协作的路由协议,使得高优先级与低优先级消息都能得到合理的处理,对于低优先级消息,对CT进行了估计,剔除了不可信点,减少了链路断裂的概率,对于高优先级消息,由于高速公路场景的特殊性,采取洪泛的广播,提高了数据包成功传输率,所以,CCR的数据包成功传输率远高于其它两种路由协议,平均的端到端延迟也小于GPSR、AODV协议,而且随着数据发包率的增加这种优势愈发明显。通过仿真结果表明,CCR较传统基于拓扑和基于地理信息的路由有更好的传输成功率,而且表现出更好的稳定性。
四、结语
综上所述,CCR算法重点在于通过传输层与路由层的跨层协作机制,针对不同的优先级采取了不同的路由策略。仿真结果表明,在高速公路场景下,针对车联网不同业务的Qos需求,CCR最大程度地利用了有限的网络资源,减少了数据传输延时,有效地满足了车联网各种业务的需求。
