基于粒子群算法的直觉模糊多目标规划*
2015-05-29成央金白玉龙谢婉莹
成央金, 白玉龙, 谢婉莹
(湘潭大学 数学与计算科学学院,湖南 湘潭411105)
1983年保加利亚学者Atanassov将Zadeh模糊集[1]扩充和推广提出了直觉模糊集[2]的概念之后,关于直觉模糊集理论的研究逐渐受到广大学者的关注,且已经被广泛应用于决策制定[2]、数学规划[3]、模式识别[4]、医疗诊断[5]等领域.与Zadeh模糊集相比,直觉模糊集不仅通过隶属函数表示信息,而且还增加了非隶属函数和犹豫度这两个指标,相较于Zadeh模糊集,直觉模糊集在处理带有模糊性和不确定性的信息上更贴近实际.
1997年Angelov对于在直觉模糊环境中的优化问题进行了研究并提出了求解直觉模糊多目标线性规划的一种求解方法[8],随后DiptiDubey等[10]对其进行了改进,使解法更优了,但是,以上方法均是将目标函数和约束函数同等看待的.本文主要研究采用线性加权的方法来处理目标函数和约束函数,得到新的求解模型,并用粒子群算法求解,使之适应线性和非线性情形的规划.
1 直觉模糊多目标规划模型
直觉模糊多目标规划模型的一般形式为:

设A是非空论域U上的一个直觉模糊集,B是非空论域U上的一个区间模糊集,且A,B分别表示如下:

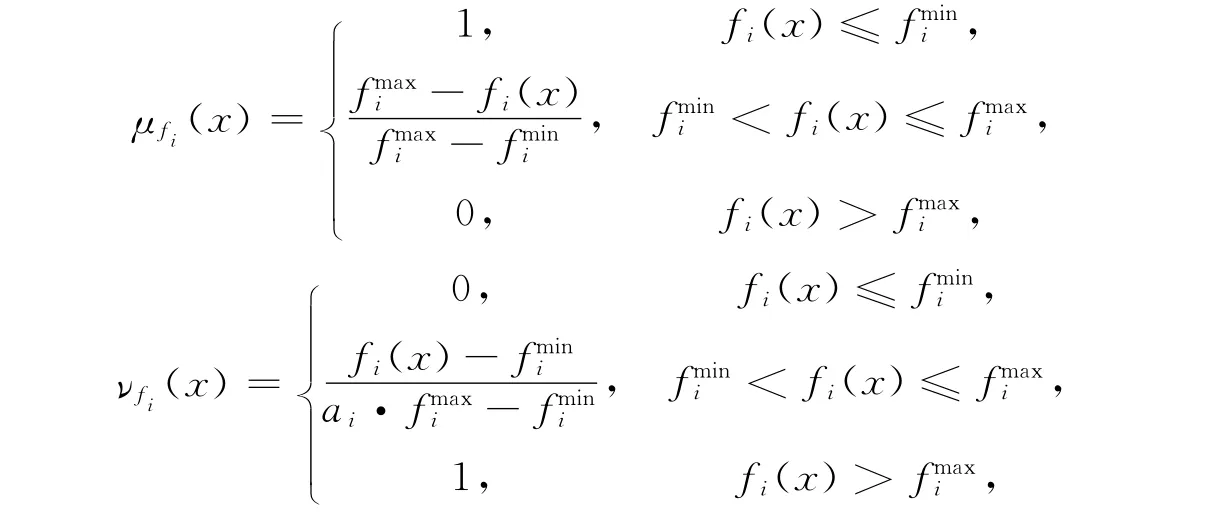
令μfi(x),νfi(x),分别表示第i个目标函数的隶属函数和非隶属函数,定义[15]如下:
令μgj(x),νgj(x)分别表示第j个约束函数的隶属函数和非隶属函数,定义[15]如下:

其中:dj表示约束函数gj(x)允许最大的偏移,;bj≥0,用来调节犹豫度,当bj=0时犹豫度为0,当bj→ ∞,犹豫度趋于1-μgj(x),bj一般取0~30.
设FD(x)=μD(x)+λπD(x),λ∈[0,1],利用这个关系式可以将目标函数和约束函数直觉模糊集分别进行转化.
目标函数直觉模糊集转化为

约束直觉模糊集转化为

令μfi(x),νfi(x),分别表示第i个目标函数的隶属函数和非隶属函数,定义如下:

令μgj(x),νgj(x)分别表示第j个约束函数的隶属函数和非隶属函数,定义如下:

其中:dj表示约束函数gj(x)允许最大的偏移,;bj≥0,用来调节犹豫度,当bj=0时犹豫度为0,当bj→ ∞,犹豫度趋于1-μgj(x),bj一般取0~30.
在实际生活中每个人做出决策的判断标准都不相同,但是在某些情况下,有的决策者可能会相对于看重目标的达成,有的决策者则与前者相反看重于约束函数.因此本文采用线性加权的方式来处理这种情况.
步骤1:将目标函数直觉模糊集和约束函数直觉模糊集转化为模糊集,

步骤2:对目标函数进行加权处理转化为单目标函数,

步骤3:对转化后的约束函数模糊集取“最小”算子,

步骤4:对F和Fg(x)取“最小”算子,

根据最大隶属度原则,将模型转化为:

即

这里的参数λ为[0,1]内的任意数,本文中λ=1/2.
2 算法及实例
基于前面的讨论,设计求解模型的粒子群算法如下:
1)随机初始化种群N中各微粒的位置和速度.
2)计算目标函数和约束函数的隶属度和非隶属度,然后,根据式(1),(2)进行转化.
3)计算其适应值,对每个微粒i,将其适应值与经历的最好位置Pbest作比较,如果较好,则将其作为当前的最后位置Pbest.
4)对每个微粒i,将其适应值与全局所经历的最好位置gbest作比较,如果较好,则将其作为当前的最后位置gbest.
5)更新粒子的速度和位移

6)更新学习因子

其中:c1,ini,c2,ini分别代表c1和c2的初始值,c1,fin,c2,fin代表c1和c2的迭代终值.对于绝大多数情况采用如下的参数设置效果较好:

7)比较当前所有的Pbest和gbest的值,更新gbest.
8)根据杂交概率选取指定数量的粒子放入杂交池内,池中的粒子随机两两杂交产生同样数目的子代粒子,子代的位置和速度计算公式如下,

保持Pbest和gbest不变.
为了克服PSO算法的早熟收敛问题,在算法中,迭代每隔M(M=80)代,保留上一代的历史最优位置,微粒全部重新初始化,以提高微粒的多样性.
例1 求下例直觉模糊线性规划的最优解:

参数设置如下:d=[3,1],ai=1,bj=2,粒子群算法的粒子数取40,最大迭代次数为500,杂交概率为0.9,杂交比例为0.2,惯性权重为0.9,对每个权重值运行5次,取最优的规划.
为了比较不同的权值对优化结果(结果保留小数点后四位)的影响,取a=0.5+0.02*j,j=0,1,…,10,优化结果如表1.
从表1可以看出,随着权值的调整,使得目标函数f1的值变小,f2的值变大,得到一组优化的结果,决策者可以根据实际的需要,选择合适的优化方案.

表1 优化结果Tab.1 The optimization results
3 结 语
本文提出的基于粒子群算法的直觉模糊多目标规划,适用于线性和非线性约束的情况,具有通用性;文中采用线性加权的方法来处理目标函数优越集和约束函数优越集,决策者可以根据实践的需要,选择合适的优化方案,具有很大的灵活性.
[1]ZADEH L A.Fuzzy sets[J].Information and Control,1965,8(3):338-353.
[2]ATANASSOV K T.Intuitionistic fuzzy sets[J].Fuzzy Sets and Systems,1986,20(1):87-96.
[3]ATANASSOV K.Intuitionistic fuzzy sets and expert estimations[J].Busefal,1993,55:67-71.
[4]ATANASSOV K.Intuitionistic fuzzy sets and expert systems.II[J].Busefal,1994,59:64-69.
[5]ATANASSOV K.Remark on intuitionistic fuzzy expert systems[J].Busefal,1994,59:71-76.
[6]ATANASSOV K T.Intuitionistic fuzzy sets[M].Physica-Verlag HD,1999.
[7]ATANASSOV K,GARGOV G.Interval valued intuitionistic fuzzy sets[J].Fuzzy Sets and Systems,1989,31(3):343-349.
[8]ANGELOV P P.Optimization in an intuitionistic fuzzy environment[J].Fuzzy Sets and Systems,1997,86(3):299-306.
[9]BELLMAN R E,ZADEH L A.Decision-making in a fuzzy environment[J].Management Science,1970,17(4):141-164.
[10]DUBEY D,CHANDRA S,MEHRA A.Fuzzy linear programming under interval uncertainty based on IFS representation[J].Fuzzy Sets and Systems,2012,188(1):68-87.
[11]LIN C C,CHEN A P.Generalization of Yang et al’s method for fuzzy programming with piecewise linear membership functions[J].Fuzzy Sets and Systems,2002,132(3):347-352.
[12]DE S K,BISWAS R,ROY A R.Some operations on intuitionistic fuzzy sets[J].Fuzzy Sets and Systems,2000,114(3):477-484.
[13]YAGER R R.SOME aspects of intuitionistic fuzzy sets[J].Fuzzy Optimization and Decision Making,2009,8(1):67-90.
[14]徐小来,雷英杰,戴文义.基于遗传算法的直觉模糊多目标规划[J].电光与控制,2009(1):31-33
[15]徐小来,雷英杰,戴文义.基于改进微粒群算法的直觉模糊整数规划[J].计算机应用,2008,28(9):2 395-2 397.
