模糊PID控制技术在电机耐久试验系统中的应用
2015-05-25邹存名等
邹存名 等

摘要:文章针对小型直流电机耐久性能测试中需要快速、准确地控制电机达到某一工作点的问题,提出采用模糊PID控制器进行调整,实现了被测电机以较短时间运行到目标转矩工作点处且超调量较小。与常规PID控制器进行比较,模糊PID控制器控制效果更好,调整时间短,使系统具有良好的动态性能。
关键词:耐久试验系统;模糊PID控制技术;小型直流电机;电机转矩;PID参数 文献标识码:A
中图分类号:TP273 文章编号:1009-2374(2015)19-0062-02 DOI:10.13535/j.cnki.11-4406/n.2015.19.030
汽车座椅所用的电机对其参数及性能稳定性要求非常高,因此在电机出厂前需要进行相关参数的测试,这些测试主要是为了测出电机的一些极限参数,这些参数主要包括电机运行的转矩,同时在该转矩下,电机所消耗功率及电机在该转矩下的转速。这样所得到的电机运行参数形成的电机特性曲线才能更完整地反映电机运行的状态。针对电机的市场需求,电机耐久试验监控系统不仅具有测试电机的转矩及该转矩下对应的转速和功率消耗参数外,而且系统满足了实时性和快速性的需求,能够很快到达预定工作点。
传统的PID控制对系统出现较大偏差的情况很难达到预设工作点,会出现超调和响应速度慢等问题。
为了更好地测试电机的运行性能,系统驱动电机达到预定工作点的时间尽量短,以避免电机没在工作点时运行时间过长而过热,使电机不能准确测出电机的具体运行参数,同时也避免了超调或工作点来回摆动的现象。而模糊控制针对大偏差系统有较快的调节作用,PID控制可以在小偏差范围内得到较理想的性能效果。基于上述考虑,本文提出采用模糊PID控制技术相结合应用到电机耐久测试系统中,获得了良好的控制效果。
1 模糊PID控制系统的基本原理
对于时变的复杂控制系统和无法建立模型的控制系统,常规PID控制效果比较差,其PID参数确定就更加困难,很难达到预期效果;而模糊控制系统对小误差特别是稳态误差的处理是很困难的,经常在稳态点附近有小范围振荡现象,对系统需求控制精准度较高的场合很难实现。综上所述,如果将两种方法结合使用,兼有两者优点构成了模糊PID控制器。
本文采用模糊自整定技术对系统的PID参数进行整定,其主要原理如图1所示:
图1 常规PID参数模糊自整定框图
利用模糊控制技术,建立PID各个参数与偏差e和偏差变化率de之间的关系的规则库,先将PID控制中的参数模糊化,再进行模糊推理,清晰化,从而使控制系统的PID参数进行实时智能化的整定。其主要的实现原理是实时检测PID控制系统运行中de和e,再通过规则库对来对PID各个参数进行整定,从而满足系统的复杂控制要求,使被控对象具有很好的动态性能,且计算量小。
2 模糊PID控制器在电机耐久测试系统中的应用
电机耐久试验系统的上位机主要是由工控机构成,下位机主要是由直流稳压稳流电源(0~30V、0~100A)、AD调理卡、FV转换器组成,如图2所示:
图2 测试系统的构成框图
该系统通过力矩、速度传感器检测电机的转矩和速度送至直流稳压稳流电源后,进行滤波、放大、隔离及A/D转换等处理后送给计算机,由计算机通过模糊控制技术整定处理数字控制信号,再通过数模转换器将处理后的数字信号送到控制电路中,调整电机的励磁电流从而改变电机运行转矩,实现了对电机达到预定工作点的控制。
下面以转矩为例,说明系统模糊PID控制器的设计流程。
2.1 模糊控制器的模糊化过程设计
量化输入转矩偏差e的论域为[-12,+12],e的模糊子集定义为集:{PB,PM,PS,PZ,ZE,NZ,NS,NM,NB}。
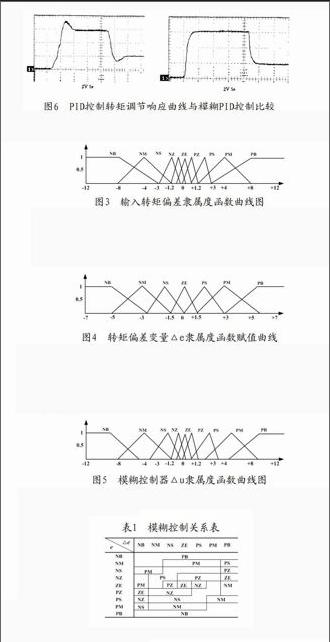
为了实现模糊控制器输入转矩的精准控制,在预定运行转矩点应具有较高分辨率。根据系统性能指标要求,选用隶属度函数曲线如图3所示:
图3 输入转矩偏差隶属度函数曲线图
量化输入转矩偏差变化率△e的论域为[-7,+7]。△e的模糊子集定义为集:{PB,PM,PS,ZE,NS,NM,NB}。选用隶属度函数曲线如图4所示:
图4 转矩偏差变量△e隶属度函数赋值曲线
量化转矩输出变量△u的论域为[-12,+12]。△u的模糊子集定义为集:{PB,PM,PS,PZ,ZE,NZ,NS,NM,NB}。根据转矩偏差变化量△u,选用隶属度函数曲线如图5所示:
图5 模糊控制器△u隶属度函数曲线图
综上所述,利用以上3种模糊规则曲线方式,实现了系统转矩输入量和系统转矩输出量的模糊化过程。
2.2 模糊清晰化过程设计
由于本系统控制精度要求,系统采用两维矩阵输入和一维矩阵输出。由模糊关系原理,当系统转矩输入偏差为NB,系统转矩输出控制变化量为ZE,系统转矩输入偏差变化量为PB时。
根据系统实际运行的经验,可以定义实际模糊控制关系表如表1所示:
表1 模糊控制关系表
3 试验的结果及分析
下面针对某直流电机进行耐久测试,使用PID控制器和模糊PID控制器方法分别进行分析。试验参数
如下:
电机的额定功率为150W,电机空载转速为1200r/min;改变转矩的过程为:电机空载,预定工作点转矩为1.2N·m,预定工作点转矩0.6N·m。用示波器测量试验后所测曲线如图6所示:
图6 PID控制转矩调节响应曲线与模糊PID控制比较
从图6中可以清晰地看出,采用模糊PID控制器时要比采用常规PID控制器上升时间缩短0.5s,并且没有任何超调,响应曲线也比较平滑,响应速度快。
因此,采用PID控制器在响应速度上较模糊PID控制器缓慢,并且有超调现象。而采用模糊PID控制器调节,可以控制被测电机很快地运行到目标转矩点,并且没有超调,可以得到较好的控制效果。
4 结语
试验结果表明,对于电机期望工作点的调节,对出现大偏差的情况,采用模糊PID控制器明显优于传统PID控制器,系统可以快速地使电机达到稳定工作点,并且没有任何超调现象。
参考文献
[1] 麦俊杰,黄进,等.模糊控制技术在电机测试系统中的应用[J].中小型电机,2002,29(5).
[2] 林钟慎.PID控制器的解析法整定及其Matlab实现[J].计算技术与自动化,2003,22(1).
[3] 王海青,姬长英,等.模糊自整定PID温度控制系统的建模与仿真[J].计算机工程,2012,38(7).
[4] 谢志江,朱伟.基于DSP的电机综合参数测试系统研究[J].机械工程师,2007,(4).
[5] 王万良.自动控制理论[M].北京:科学出版社,2001.
基金项目:大连瓦房店市科技局2013年项目。
作者简介:邹存名(1982-),男,辽宁大连人,大连科技学院电气工程系讲师,硕士,研究方向:多自由度机器手臂控制。
(责任编辑:陈 倩)endprint
