改进的强跟踪平方根UKF在卫星导航中应用
2015-05-25王松艳张迎春李化义
李 敏,王松艳,张迎春,2,李化义
(1.哈尔滨工业大学航天学院,黑龙江哈尔滨150001;2.深圳航天东方红海特卫星有限公司,广东深圳518057)
改进的强跟踪平方根UKF在卫星导航中应用
李 敏1,王松艳1,张迎春1,2,李化义1
(1.哈尔滨工业大学航天学院,黑龙江哈尔滨150001;2.深圳航天东方红海特卫星有限公司,广东深圳518057)
针对应用于受不确定性干扰和噪声影响的卫星自主导航系统中的无迹卡尔曼滤波(unscented Kalman filter,UKF)存在估计精度低、跟踪性能差和鲁棒性弱等缺陷,提出一种改进的强跟踪平方根UKF(strong tracking square-root UKF,STSRUKF)导航方法。该方法中利用星敏感器和光学导航相机设计出导航方案,并通过转换方程将间接量测量转换为观测量。针对平方根UKF(square-root UKF,SRUKF)在高阶系统中因为sigma点的零权值系数是负的或者数值计算误差太大时而可能造成滤波器发散问题,采用一种改良的平方根分解方法,改善了滤波器的稳定性。同时,基于强跟踪滤波器理论(strong tracking filters,STF),引入多重自适应衰减因子调节协方差矩阵,使得滤波器具有强跟踪能力和克服系统模型不确定的鲁棒性,改善了滤波器的估计精度。将该方法应用于卫星自主导航系统中,实验仿真结果表明,相对于平方根UKF和STF,该方法不仅保证了系统的可靠性,还提高系统的导航精度和改善系统的鲁棒性及跟踪能力。
卫星导航系统;不确定性干扰;改进的强跟踪平方根无迹卡尔曼滤波;鲁棒性
0 引 言
基于光学测量的卫星自主导航是指卫星利用安装在自身身上的星敏感器及光学导航相机来测量星光信息及天体的边缘信息,并在轨处理观测到的光学图像信息,获取自身的位置和速度信息的过程。由于其具有自主性强、精度高、实时性好等优点,是当今卫星控制技术发展的趋势,它在减轻地面测控负担、降低卫星运行费用、提高卫星的生存能力和扩展卫星的应用潜力等方面具有重要意义。由于卫星导航系统其是非线性的,因此需要用非线性滤波技术来得到其状态变量的最优估计[1]。展卡尔曼滤波器(extended Kalman filter,EKF)因为其方法简单容易实现等优点,被广泛应用于卫星自主导航系统中。但是EKF实质仍然是一种在线线性化的算法,存在自身的理论缺陷性:①EKF在线性化处理时需要计算雅克比(Jacobian)矩阵,其计算过程繁琐复杂且容易出错;②在系统非线性较强的时候,线性化误差容易增大,估计精度会下降,甚至发散;③当初始状态误差相对较大时,EKF滤波很不稳定、收敛速度较慢、估计精度较低[2-5]。
为了解决这个问题,文献[6-8]提出了无迹卡尔曼滤波(unscented Kalman filter,UKF)方法。相对于EKF,UKF采用unscented变换对非线性概率密度分布进行近似,具有不需要计算Jacobian矩阵、估计精度更高等优点,近年来在导航系统滤波问题当中获得广泛应用。然而无论是EKF,还是UKF,它们的高精度都是建立在精确的系统模型和精确已知的系统先验噪声分布基础之上,当系统模型和系统噪声统计特性不准确的情况下,UKF的估计性能会下降,甚至出现滤波发散,也就是说UKF不具备能够克服系统模型不确定性的鲁棒性。针对模型不确定性估计问题,文献[9-10]提出了强跟踪滤波器(strong tracking filters,STF)的方法。强跟踪滤波器通过在状态预测协方差阵中引入渐消因子,自适应调整增益矩阵,保证输出残差序列之间的相互正交,从而使得在系统模型不确定时,仍能保持对系统状态的跟踪能力,即STF具有关于模型不确定的鲁棒性。但是STF在EKF的基础上的改进,与EKF存在类似,仍然无法克服EKF自身存在的理论局限性。为此,文献[11-12]结合STF理论和UKF理论,提出了一种基于强跟踪的UKF,并应用于导航系统中,获得了比STF和UKF更好的估计精度,具有比STF和UKF更好的鲁棒性和跟踪能力,改善系统的可靠性。
虽然强跟踪UKF具有克服系统不确定的鲁棒性,但强跟踪UKF在数值计算的过程中存在舍入误差,随着迭代计算的累加,积累的舍入误差可能会破坏系统估计误差协方差矩阵的非负定性和对称性,导致算法的收敛速度慢,甚至造成算法的不稳定。平方根UKF算法采用误差协方差矩阵的平方根矩阵进行迭代运算,解决了常规UKF算法中由于累积舍入误差引起误差协方差矩阵负定性而导致的滤波结果发散的问题,提高了滤波的精度和稳定性[13-14]。但是,标准平方根UKF是基于QR分解和Cholesky分解来进行的,当sigma点的零权值系数是负的或者数值计算误差太大时有可能造成cholesky分解失败,造成滤波器发散。
针对以上问题描述,为了使得滤波器即具有能够克服系统不确定的鲁棒性、较好的跟踪能力和估计精度,又具有较好的数值计算稳定性以及较快的收敛速度,本文以受不确定性因素影响的星敏感器/光学导航相机卫星自主导航系统为背景,提出了一种改进的强跟踪平方根UKF的卫星自主导航方法。该方法中,根据强跟踪滤波器原理,引入时变渐消自适应衰减因子,自适应调整滤波增益矩阵和预测误差协方差平方根矩阵,保证残差序列正交,改善滤波器的跟踪能力和鲁棒性。同时,在现有的基础上,改进了平方根UKF的分解操作,有效地避免了因为sigma点的零权值系数是负的或者数值计算累积误差太大时有可能造成滤波器发散问题,保证了滤波器的稳定性。另外,相对于标准的平方根UKF,改进的平方根分解缩短了计算量,实时性更好。在卫星自主导航系统中的仿真结果表明,该方法是有效的。
1 改进的平方根强跟踪UKF
1.1 平方根UKF
针对一类非线性系统:

式中,X为状态变量;Z为观测量;f(uk,Xk,k)为系统的非线性状态方程,具有一阶连续偏导数;H为线性测量方程;过程噪声wk和测量噪声Vk均为均值为零的高斯白噪声;其协方差矩阵分别为Qk和Rk。假设系统的初始状态为X0,X0与wk及Vk相互独立,基于标准平方根UKF的状态估计方法[15]如下:
(1)初始化状态^X0,状态误差协方差矩阵平方根S0:

(2)对于k=1,2,…,n实现步骤如下:
①计算sigma点

②时间更新

式中,qr和cholupdate分别表示QR分解和Cholesky一阶更新,为标准的matlab指令。
③测量更新


上述过程中用到的参数计算如下:

1.2 改进的平方根UKF
平方根UKF(square-root UKF,SRUKF)相对于UKF具有更好的鲁棒性、稳定性及估计精度[16]。在SRUKF的分解过程中,矩阵{S±OUUT}的Cholesky分解是用cholupdate{S,U,±O}表示,它要求矩阵必须是半正定的。但是在SRUKF中,按式(7)和式(13)更新协方差矩阵,实际如下:

式中,sgn为符号函数,sgn(X)=X/abs(X),X为变量,abs为Matlab当中的绝对值函数。
在高阶系统中,当系统噪声为高斯白噪声的时候,为了获得较好的估计精度,一般取n+λ=3,因此λ是远小于零的。根据式(21)和式(22)可知Wc0是负的,且|Wc0|≫Wci,这使得按式(8)和式(13)更新的矩阵很可能是负定的[6]。
另外,在SRUKF中,按照式(17)更新状态误差协方差矩阵,实际为

它要求等式右边必须是正定的,但是在数值计算过程中,等式右边很容易因为舍入误差的累积而破坏协方差矩阵的正定性。
针对上述问题,为了改善SRUKF的稳定性,同时又能够保持SRUKF的估计精度和鲁棒性,对SRUKF作如下改进。
(1)采用改进的状态误差一步预测协方差矩阵计算方法,文献[6]给出了一种改进的状态误差一步预测协方差矩阵的计算方法,如下:

根据式(20)可知,所有的Wmi都是正的,因此按式(24)计算的协方差矩阵Pk+1|k至少是半正定的,针对式(24)可直接采用QR分解即可得到状态误差一步预测协方差矩阵的平方根Sk+1|k,如式(25)所述,从而避免因为Wc0而造成矩阵负定的。

(2)针对线性测量方程,其测量估计值、输出误差协方差阵及互误差协方差矩阵可以直接利用Kalman递推公式来计算,而不必采用UT变换和加权拟合来进行计算,减少计算量,提高计算效率,即

利用式(28)和式(29)来计算SZ,k+1,需要进行两次矩阵乘法和一次Cholesky分解,根据文献[17]对于矩阵A进行QR分解的上三角部分等于矩阵AAT的Cholesky因子,因此可以采用计算量更小的式(30)和式(31)替换式(28)和式(29)。

式(31)实际描述为

很容易证明上述等式的右边是正定的。
(3)根据式(14)、式(23)、式(27)和式(28),Pk+1可被重
写为

文献[18]给出了式(33)的平方根分解方法,具体如下:

采用式(34)更新状态误差协方差矩阵,避免了数值计算过程中因误差累积而破坏Pk+1正定性的问题。
按照上述描述,利用式(25)代替式(7)和式(8),利用式(30)、式(31)和式(12)、式(13),利用式(34)代替式(16)和式(17)即得到改进的SRUKF算法,相对于SRUKF,该方法在保持估计精度的同时,不仅改善了滤波器的稳定性和鲁棒性,还可以改善滤波器的计算效率,提高实时性。
1.3 改进的强跟踪平方根UKF
在系统模型精确的情况下,相对于UKF和SRUKF,采用改进SRUKF可以提高系统的可靠性和实时性,同时也具有很好的估计精度。但是,针对具有不确定性因素干扰和噪声统计特性的系统仍存在鲁棒性差、估计精度低及对突变状态的跟踪能力差和收敛速度慢等缺陷,而强跟踪滤波器通过引入自适应调节因子,可以在线调整滤波增益,具有极强的模型失配鲁棒性,独特的强跟踪能力,可以有效地改善系统对突变状态的跟踪性能[9-10]。因此,结合强跟踪滤波器理论(strong tracking filters,STF),在改进的SRUKF基础上,提出改进的强跟踪SRUKF(strong tracking square-root UKF,STSRUKF)。
滤波器成为强跟踪滤波器的充分条件是通过在状态误差一步预测协方差矩阵Pk+1|k引入自适应调节因子的方法,在线实时调整增益矩阵Κk+1,使得
①E[(Xk-^Xk)(Xk-^Xk)]=min
②E[εk+jεTk]=0,k=0,1,2,…;j=1,2,…
其中,εk为残差序列,εk=Zk-^Zk。条件①是实现滤波器的估计性能指标最优,条件②是要求任意时刻输出信息残差序列保持正交。当模型与实际模型相匹配的时候,改进的SRUKF的输出残差序列是高斯白噪声序列,因此条件①和条件②是满足的。当模型存在不确定性的时候,改进的SRUKF的状态估计值偏离系统的实际状态,而这些信息必然会被输出残差序列的均值和幅值表现出来。此时通过引入自适应渐消因子dk+1在线调整增益状态Kk+1,强迫条件②成立,使得残差序列仍然保持相互正交,则就可使得滤波器保持对实际系统状态的跟踪,即改进的强跟踪SRUKF。
采用自适应渐消因子dk+1调节状态误差一步预测协方差矩阵Pk+1|k,其具体形式[19]如下:

自适应渐消因子dk+1的计算方法如下:
式中,l是一个调节因子;ρ是遗忘因子;dk+1=diag(dk+1,1,dk+1,2,…,dk+1,n)是一个多重因子;是状态方程的Jacobian矩阵。
从式(39)可以看出,Fk+1的求取将增加计算复杂度,为此,采用基于UKF与KF之间的等价描述来进行计算,设未引入自适应渐消因子前的状态误差协方差矩阵为因而有

将式(42)代入式(39),有

利用式(36)、式(37)、式(38)、式(42)、式(43)、式(40)和式(41)计算得到自适应渐消因子后,按式(35)计算状态误差协方差矩阵Pk+1|k,对其进行平方根分解得到Sk+1|k具体计算方式如下:

根据上述描述及改进的平方根UKF,由此得到基于改进的强跟踪平方根UKF状态估计方法如下:

(2)对于k=1,2,3,…,n实现步骤如下:
步骤1 按照式(4)计算sigma点;
步骤3 按式(36)、式(37)、式(38)、式(40)、式(41)、式(42)和式(43)计算自适应衰减调节因子dk+1;
步骤4 按式(44)计算状态预测协方差矩阵的平方根Sk+1|k,利用代替Pk+1|k,按式(27)计算Pxz,k+1,按式(30)和式(31)计算Gk+1及输出协方差矩阵的平方根Sz,k+1,按式(14)和式(15)计算状态估计,按式(34)计算状态协方差矩阵的平方根Sk+1。
2 卫星自主导航系统模型
2.1 系统状态方程
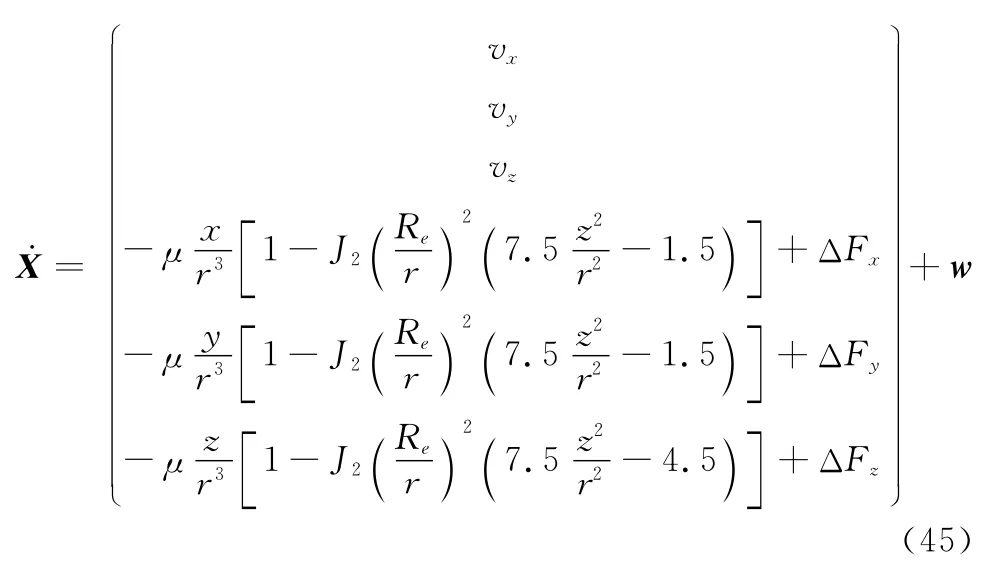
在J2000.0地心惯性赤道坐标系下,卫星自主导航系统模型(即轨道动力学模型)[20-21]如下:为航天器位置参数矢量的模;J2为地球引力系数;Re是地球的平均赤道半径;ΔFx、ΔFy和ΔFz为地球非球形高阶摄动项和日月摄动、太阳光压摄动以及大气压摄动等其他摄动力的影响;w为高斯白噪声。
2.2 间接量测量方程
卫星导航原理如图1所示,图中A1,A2为地心与卫星及两恒星平星光方向的夹角,A3是卫星相对于地球的张角。根据文献[22-23],这3个角度可由星敏感器和星光相机测得,它们分别为
式(45)可简写为

式中,X=[x y z vxvyvz]T为卫星在地心惯性坐标系下3个方向的位置和速度;μ为引力常数;r=
式中,θ为已知的两恒星平行光的夹角。通过测量到的A1,A2则可以确定以地球为顶点的两个圆锥面,再利用已知的两恒星平行光的单位矢量i1,i2则可确定卫星相对于地心的矢量r的方向,最后结合测量到的卫星相对于地球的张角A3及地球半径Re即可确定位置矢量r,其数学描述如下:


图1 卫星导航原理图
根据以上描述,完全可以由几何关系得到卫星关于地球的相对位置。根据式(47)和式(48)有

将x,y,z作为间接量观测,可得观测方程为

式中,Z=[x y z]T;V为高斯白噪声;
3 实验结果及仿真分析
为了验证本文提出的改进的强跟踪UKF方法的有效性,分别将改进的STSRUKF、STF和SRUKF对由式(42)和式(47)组成的导航系统,将其离散化,然后进行仿真。仿真环境为Matlab R2010a,仿真参数设置如下[24]:坐标系为J2000.0地心赤道惯性坐标系,半轴长为a=7 136.635km,偏心率e=0.001,轨道倾角i=65°,升交点赤经Ω=30°,近地点角距为ω=30°,光学导航相机精度为0.005°,星敏感器精度为3″,测量噪声均为白噪声,采样时间间隔为T=1s,系统的初始误差为X=[4.5 4.3 3.2-0.46 0.056 0.59]T。仿真分别在理想情况、系统受到干扰的情况和系统存在模型不确定型3种环境下进行,在理想情况下,仿真时长为t=100s,主要是为了验证改进的强跟踪平方根UKF的估计精度;在系统受到干扰的情况下,仿真时长为t=600s,在系统存在模型不确定性的情况下,仿真时长为t=400s,这两种情况下主要是为了验证改进的强跟踪平方根的强跟踪能力和鲁棒性。
(1)理想环境下的仿真
在理想情况下的仿真结果如图2和图3所示,从图2和图3可以看出,在理想情况下,3种方法都能很好地跟踪系统的状态变化,3种方法的收敛速度和估计精度差不多。

图2 位置估计绝对误差

图3 速度估计绝对误差
(2)系统受到干扰的情况下仿真
在实际的空间环境中,系统受到的干扰及测量机构发生故障是不确定的范围,为了验证改进的强跟踪平方根UKF对系统不确定性的跟踪能力、估计精度及鲁棒性。假设系统存在以下几种不确定性,设
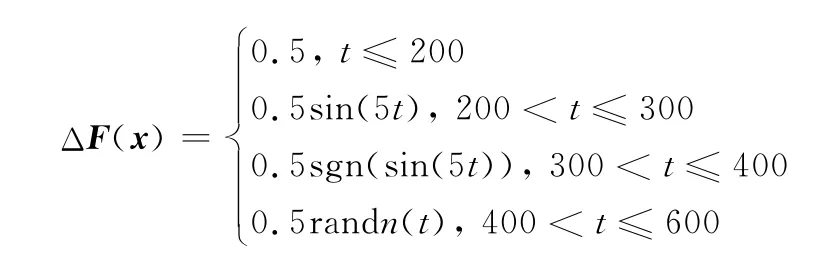
仿真实验结果如图4和图5所示,从图4和图5可以看出,SRUKF的估计性能很差,受系统的不确定性因素影响很大,即不具有对系统不确定性的鲁棒性和强跟踪能力。而STF针对系统受到常值干扰、有界正弦时变干扰和有界周期性方波干扰等不确定性因素影响时具有较好的鲁棒性和强跟踪能力,估计性能几乎不受影响,但是当系统受到随机无规律有界干扰不确定性因素影响时,STF的鲁棒性和跟踪能力变差,估计误差变大。但是,在上述4种的任何一种干扰不确定性因素的影响下,本文提出的STSRUKF的估计性能都几乎不受影响,具有良好的估计性能,表现出优良的鲁棒性和强跟踪能力。

图4 位置估计绝对误差

图5 速度估计绝对误差
(3)系统存在模型不确定性的情况下仿真
在实际航天器导航系统中,大多数时候,由于外界复杂多变的环境,在系统建模的时候存在未知的建模动态特性,即建立的系统模型存在不确定性,为了进一步验证改进的强跟踪平方根UKF的鲁棒性、强跟踪能力和稳定性。假设,系统模型存在如下的不确定性:

仿真实验结果如图6和图7所示,从图6和图7可以看出,无论是位置曲线还是速度曲线,SRUKF的估计性能都很差,严重偏离真实的状态,跟踪能力弱,对系统模型存在的不确定性很敏感,即不具备克服系统不确定性的鲁棒性。STF估计精度明显要好于SRUKF,但是当系统模型的不确定性变大的时候,STF的估计性能也开始变差,不过变化范围不是很大。而本文提出的改进的强跟踪平方根UKF,相对于上述两种方法,估计精度是最好的,而且针对两种假设的系统模型不确定性的情况下,其估计性能也几乎不受影响,即具有很好的克服系统模型不确定的鲁棒性。

图6 位置估计绝对误差

图7 速度估计绝对误差

式中,N为蒙特卡罗仿真次数;j表示第j次仿真;X(k)及分别表示第k时刻状态真实值及滤波估计值。
为了更好地比较3种算法在稳态的估计性能,评价算法的有效性,采用均方根误差(root-mean-square-error,RMSE)来描述估计质量,分别针对两种情况下,进行100次蒙特卡罗仿真。仿真结果如表1~表3所示,RMSE的表达式如下:

表1 理想情况下的均方根误差

表2 系统受干扰影响下的均方根误差

表3 系统存在模型不确定情况下的均方根误差
从表1中可以看出,在理想情况下,3种估计方法得到的均方根误差相差不大,说明3种方法的的估计精度差不多,在同一个数量级上。从表2和表3可以看出,在系统受到干扰不确定性因素影响或者系统存在模型不确定的时候,SRUKF得到的均方根误差最大,与STF和STSRUKF相比较,要高出一个数量级以上,其次是STF得到的,最好的是STSRUKF,这说明STSRUKF估计的结果的精度是最好的。比较表1~表3中的数据,也可知系统存在的模型不确定情况下,3种方法的估计结果的精度最差。另外,根据表1~表3中的数据还可知,在系统受到不确定因素影响和系统存在模型不确定两种情况下,SRUKF的估计精度变差了很多,而STF和STSRUKF则变化相对较小,这说明通过引入自适应调节因子可以很好地改善滤波器对系统不确定性的鲁棒性,克服干扰的影响。
4 结 论
本文针对卫星导航系统,设计了基于星敏感器和光学导航相机的导航方案,针对标准平方根UKF存在的缺陷,给出了一种改进的平方根UKF方法,改善了平方根UKF的数值稳定性,针对卫星导航系统受不确定性干扰因素影响,采用强跟踪滤波方法,提出了改进的强跟踪平方根UKF方法。将改进的STSRUKF、STF和SRUKF分别用于卫星导航系统中进行实验仿真验证,仿真时分别将4种不同的干扰信号引入系统中,仿真实验结果表明,相对于SRUKF和STF,STSRUKF对系统受不确定性干扰因素影响所具有的鲁棒性和强跟踪能力都是最好的,能够准确的估计和跟踪系统的状态变化,提高估计精度。
[1]Fesq L.Spacecraft autonomy in the new millennium[C]∥Proc.of the Annual AAS Rocky Mountain Guidance and Control Conference,1996.
[2]Psiaki M L.Backward-smoothing extended kalman filter[J].Journal of Guidance Control and Dynamics,2005,28(5):885-894.
[3]Norgaard M,Poulsen N K,Ravn O.New development in state estimation systems[J].Automatica,2000,36(11):1627-1638.
[4]Okita F,Ozaki S.Nonlineaity-compensation extended Kalman filter and its application to target motion[J].Oki Technical Review,1997,63(159):1-12.
[5]Joseph J,LaViola J.A comparison of unscented and extended Kalman filtering for estimating quaternion motion[C]∥Proc.of the American Control Conference,2003.
[6]Julier S J,Uhlamnn J K,Durrant-Whyte H F.A new method for the nonlinear transformation of means and co variances in filters and estimaters[J].IEEE Trans.on Automatic Control,2000,45(3):477-482.
[7]Zhang Y,Fang J C.Study of the satellite autonomous celestial navigation based on the unscented Kalman filter[J].Journal of Astronautics,2010,31(3):739-747.(张瑜,房建成.基于Unscented卡尔曼滤波器的卫星自主天文导航研究[J].宇航学报,2010,31(3):739-747.)
[8]Liu T,Xie Y C.Stability analysis of UKF and its application in relative navigation[J].Journal of Astronautics,2010,31(3):739-747.(刘涛,解永春.UKF稳定性研究及其在相对导航中的应用[J].宇航学报,2010,31(3):739-747.)
[9]Zhou D H,Xi Y G,Zhang Z J.Suboptimal fading extended Kalman filtering for nonlinear systems[J].Control and Decision,1990,5(5):1-6.(周东华,席裕庚,张钟俊.非线性系统次优渐消因子的扩展卡尔曼滤波[J].控制与决策,1990,5(5):1-6.)
[10]Zhou D H,Xi Y G,Zhang Z J.A syboptimal multiple fading extended Kalman filter[J].Acta Automatica Sinica,1991,17(6):689-696.(周东华,席裕庚,张钟俊.一种带多重次优渐消因子的扩展卡尔曼滤波器[J].自动化学报,1991,17(6):689-696.)
[11]Lu H Y,Zhao W,Xiong J.Exploration of strong tracking UKF used in the SINS/GPS integrated navigation[J].Avionics Technology,2008,39(4):5-10.(陆海勇,赵伟,熊剑.强跟踪UKF滤波在SINS_GPS组合导航中的应用研究[J].航空电子技术,2008,39(4):5-10.)
[12]Yang W B,Li S Y.Autonomous navigation filtering algrithm for spacecraft based on strong tracking UKF[J].Systems Engineering and Electronics,2011,33(11):2485-2491.(杨文博,李少远.基于强跟踪UKF的航天器自主导航间接量测滤波算法[J].系统工程与电子技术,2011,33(11):2485-2491.)
[13]Chen Y Z,Sun Z G,Ma H B.Square-root unscented Kalman filter for vehicle integrated navigation[J].Systems Engineering and Electronics,2008,30(5):926-929.(陈阳舟,孙章固,马海波.基于平方根UKF的车辆组合导航[J].系统工程与电子技术,2008,30(5):926-929.)
[14]Fan L W,Zheng W,Tang G J.Autonomous navigation method for orbital maneuver vehicle based on square-root unscented Kalman filter[J].Journal of Chinese Inertial Technology,2008,16(6):667-675.(范利涛,郑伟,汤国建.基于平方根UKF滤波的轨道机动飞行器自主导航方法[J].中国惯性技术学报,2008,16(6):667-675.)
[15]Fu M Y,Deng Z H,Zhang J W.Kalman filtering with applications to navigation systems[M].Beijing:Science Press,2003.(付梦印,邓志红,张继伟.Kalman滤波及其在导航系统中的应用[M].北京:科学出版社,2003.)
[16]Jafarzadeh S,Lascu C,Fadali S.Square root unscented Kalman filters for state estimation of induction motor drives[J].IEEE Trans.on Industry Applications,2013,49(1):92-99.
[17]Merwe V D,R.Wan E A.The square-root unscented Kalmanfilter for state and parameter-estimation[C]∥Proc.of the IEEE International Conference on Acoustics,Speech and Signal Processing,2001:3461-3464.
[18]Kaminski P G,Bryson A E,Schmidt S F.Discrete square root filtering:a survey of current techniques[J].IEEE Trans.on Automatic Control,1970,16(6):727-736.
[19]Qian M H,Huang W,Sun L.Attitude estimation of strong tracking UKF based on multiplie fading factors[J].Systems Engineering and Electronics,2103,35(3):580-585.(钱明华,黄蔚,孙龙.基于多重次渐消因子的强跟踪UKF姿态估计[J].系统工程与电子技术,2013,35(3):580-585)
[20]Li P,Cui H T,Cui P Y.UPF based autonomous navigation scheme for deep space probe[J].Journal of Systems Engineering and Electronics,2008,19(3):529-536.
[21]Shang L,Liu G H,Zhang R.An information fusion algorithm for integrated autonomous orbit determination of navigation satellites[J].Acta Astronautica,2013,85:33-40.
[22]Gan Q B,Ma J B.Autonomous satellite constellation orbit determination using the star sensor and inter-satellite links data[J].Science China-Physics Mechanics &Astronomy,2010,53(5):966-974.
[23]Qian H M,Sun L,Cai J N.A star light refraction scheme with single star sensor used in autonomous satellite navigation system[J].Acta Astronautica,2014,96:45-52.
[24]Zhang G Y,Chen Y M,Yang F.Applying of forecast-revise EKF algorithm in autonomous navigation system[J].Journal of Astronautics,2009,30(6):2227-2230.(张共愿,程咏梅,杨峰.预测-校正EKF算法在自主导航中的应用[J].宇航学报,2009,30(6):2227-2230.)
Satellite autonomous navigation filtering algorithm based on improved strong tracking square-root UKF
LI Min1,WANG Song-yan1,ZHANG Ying-chun1,2,LI Hua-yi1
(1.College of Astronautics,Harbin Institute of Technology,Harbin 150001,China;2.Aerospace Dongfanghong Development Ltd,Shenzhen 518057,China)
For the satellite autonomous navigation system subjects to model uncertainties,external disturbances and noises,the unscented Kalman filter(UKF)method has low accuracy,poor tracking ability and poor robustness.An improved strong tracking square-root unscented Kalman filter(STSRUKF)-based autonomous navigation method is proposed.For the navigation purpose,star sensors and optical navigation cameras are used in this method,and the indirect measurement vector is transformed to observables through a transition equation.To avoid the problem that negative zero weights of sigma points and great calculation errors in square-root UKF(SRUKF)design for high-order systems,a modified square-root decomposition method is applied for the SRUKF design to improve the stability of the SRUKF.In addition,based on strong tracking filters(STF),multiple adaptive fading factors in adjustment covariance matrix are adopted so that the STSRUKF has better tracking ability,better robustness against model uncertainties and better estimation accuracy.Finally,the STSRUKF-based method is applied to the satellite autonomous navigation systems,and simulation results are provided to verify the effectiveness and practicability of the proposed approach.
satellite autonomous navigation system;uncertain disturbance;improved strong tracking square-root unscented Kalman filter(STSRUKF);robustness
V 19
A
10.3969/j.issn.1001-506X.2015.08.22
李 敏(1989-),男,硕士研究生,主要研究方向为卫星姿态估计及控制、非线性滤波方法在导航当中的应用。
E-mail:liminhit@126.com
王松艳(1976-),女,副教授,博士,主要研究方向为飞行器控制。
E-mail:wangsy@hit.edu.cn
张迎春(1961-),男,教授,博士研究生导师,主要研究方向为卫星控制系统设计、卫星总体设计、卫星导航。
E-mail:zhang@hit.edu.cn
李化义(1978-),男,讲师,博士,主要研究方向为卫星编队。
E-mail:lihuayi@hit.edu.cn
1001-506X201508-1858-08
网址:www.sys-ele.com
2014-07-01;
2014-10-23;网络优先出版日期:2015-01-06。
网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20150106.1201.005.html
国家自然科学基金(61304237);国防重点实验室微小型航天器技术开放基金(20090450126)资助课题
