基于e-σ-modification混合自适应律的鲁棒级联式侧滑飞行控制研究
2015-05-25程鹏飞吴成富
程鹏飞,吴成富
(西北工业大学无人机特种技术重点实验室,陕西西安710065)
基于e-σ-modification混合自适应律的鲁棒级联式侧滑飞行控制研究
程鹏飞,吴成富
(西北工业大学无人机特种技术重点实验室,陕西西安710065)
针对常规布局飞机舵面故障下的侧滑飞行控制问题,提出一种基于e-σ-modification混合自适应律的级联式侧滑飞行控制方法。在滚转角和偏航角速率响应时间远小于侧滑角响应的假设下,证明了侧滑角级联回路的稳定性并给出调节时间ts与PI参数的关系。在扰动或未建模舵动态下,针对相对阶等于1和大于1的滚转角和偏航角速率通道分别设计模型参考自适应控制器(model reference adaptive controller,MRAC)。利用李雅普诺夫方法证明了在e-σ-modification律下鲁棒自适应控制内环的有界稳定,并给出在e-modification律基础上能够进一步减小输出误差和控制参数误差界限的自适应增益选择方法。仿真验证表明在允许的舵偏范围内,该侧滑飞行控制方法不仅具有较满意的侧滑角保持和跟踪性能,而且能够有效减小上述误差界限,有效性得以验证。
舵面故障;e-σ-modification混合自适应律;级联式侧滑飞行控制;鲁棒自适应控制;误差界限
0 引 言
如今新一代高可靠战斗机、大型客机、大型运输机、高空长航时无人机均采用新一代电传飞行控制系统。为了提高飞机的生存能力,高可靠容错飞行控制理论和技术得到了世界各国的重视。飞机进行大包线、大机动飞行,以及期间发生舵面卡死等故障时,飞机的传递特性将会发生诸多变化,反映在传递函数上表现为零极点迁移、高频系数改变、相对阶改变。只针对有限工作点、控制参数固定的传统PID姿态控制器对这些变化的适应能力明显不足。虽然Gain-Schedualing方法在历史上获得成功并被广泛认同,但是激增的设计点使设计过程单调繁琐,相对笨拙和不智能。20世纪80~90年代,基于输入误差、输出误差、参数辨识的传统模型参考自适应控制方法被大量研究,全系统信号有界性得以保证。随后能够适应噪声和未建模动态的鲁棒自适应控制算法开始涌现,基于死区、平均技术σ-modification律、e-modification律的方法不仅逐步地改善鲁棒性能,使得系统信号在理想情况和扰动情况下至少保持有界性,而且使得整个系统的暂态响应特性得到改善[1-9]。近年国内外部分院校的学者不仅对容忍故障的自适应飞行控制算法进行了进一步研究[10-21],而且研究了如何改进自适应控制结构和自适应律,从而增强暂态性能[22-24]。本文以解决常规布局飞机在副翼舵面卡死故障下的控制问题为动机,提出一种基于e-σ-modification混合自适应律的鲁棒级联式自适应侧滑飞行控制方法,通过数字仿真与已有基于σ-modification律的控制方法进行对比,并讨论其优缺点。
1 侧滑角飞行控制方案
当飞机在飞行过程中突然遭遇诸如单侧副翼卡死故障或单侧机翼部分损失时,虽然可以偏转另一侧副翼来提供恢复力矩,但是稳定时间长,风险大,并且占用大量的副翼裕度使得机动能力降低,所以需要改变控制策略。由飞行力学得知,当出现侧滑角时,飞机的垂尾、机翼后掠角、上反角、上单翼均能快速有效地提供更多的恢复力矩。除此之外,从文献[25]可以看出,通过侧滑角配平稳定后仍留有足够的副翼偏转裕度来进行任务机动。图1给出整个自适应侧滑飞行控制结构。
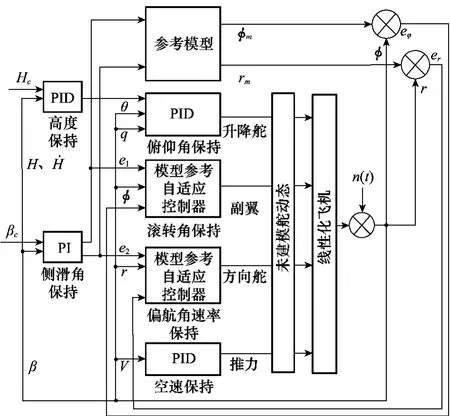
图1 自适应侧滑飞行控制结构图
整个控制结构由姿态保持、高度H保持、Va速度保持、侧滑角β保持控制器组成。在侧向通道中,β保持控制器和滚转角φ、偏航角速率r控制器级联:输入信号βc通过PID滤波后,作为φ和r控制器的给定,分别将输出信号送给副翼da和方向舵dr,以此调节并跟踪βc。高度保持与俯仰角θ保持级联,并和速度保持一样均用PID实现。φ、r控制方法用鲁棒模型参考自适应控制算法实现,其不仅能够适应因舵机卡死和侧滑飞行导致的侧向通道传递函数结构不确定,而且能够使系统在扰动或存在未建模舵动态并无持续激励下保证有界稳定。
下面对图2中侧滑角级联控制回路进行稳定性分析。证明过程基于以下假设:
假设1 滚转角φ和r偏航角速率响应速度相比β控制器要快得多,即在级联回路中可近似认为φc=φ,rc=r。
假设2 侧向姿态内回路的调节过程对参与级联系统运算的其他状态所产生的影响可以忽略。
通过对姿态环参考模型的合理设计,可以满足假设1的要求。观察式(1),将φ当做内环进行设计要比用r内环理想,一是因为da→φ通道的调节对式(1)中其余状态的影响要远远小于dr→r通道调节的影响,这就保证φ控制器前后参与运算的状态值近似不变,满足假设2;二是因为选用r内环在计算rc时会有微分运算从而产生噪声。所以下面选用φ内环证明稳定性。

图2 级联侧滑角控制回路
侧滑角级联控制回路稳定性分析:
对式(1)右边设计伪控制量和控制律,有式(2)。根据图2信号流,进一步可以得到(model reference adaptive controller,MRAC)的输入φc,如式(3)。此时,若将φ的MRAC回路响应时间设计的足够快,则在φ稳定时基本不变。侧向回路短时间调节对θ-γ的影响极小,所有φ的MRAC控制回路在调节过程中θ-γ也基本不变,这样整个级联式侧滑角控制回路的传递函数如式(4)所示。如果(ki/1+kp)>0,则式(4)的极点位于左半平面,系统渐进稳定。进一步取ki=kp=k>0,则95%调节时间ts如式(5)。
注1 r的MRAC控制回路并不影响上述稳定性分析,因为根据式(1)用类似上述的设计过程理论上同样可以得到式(4),只是根据前面分析所得到的事实,选用φ内环更好。


2 滚转角φ和偏航角速率r鲁棒MRAC设计
2.1 问题描述
由于传统固定翼飞机纵向和侧向之间的耦合影响较小,加之诸如单侧副翼卡死产生的不对称力矩对滚转和偏航运动影响较大,所以有必要针对da→φ和dr→r通道设计自适应控制器。本文基于直接模型参考自适应控制(direct model reference adaptive control,DMRAC)结构进行研究,其特点是不单独对控制器参数进行辨识[1],而直接对输出误差e=y-ym进行跟踪设计。通过对图3飞机在一些舵面卡死故障下的配平点进行线性化发现,dr→r通道传递函数的相对阶n*=1,而da→φ为n*=2。所以为了不失一般性,将对n*≥2进行扩展设计。另外,为了增加自适应控制系统对噪声和未建模舵动态的鲁棒性,在传统梯度型自适应律的基础上,提出e-σ-modification混合自适应律,并予以验证。

图3 小型电动验证无人机
2.2 传统MRAC方法
图4为相对阶n*=1的DMRAC结构图。整个结构分为4个部分:相对阶为(n-m)=1参考模型、前馈控制部分、反馈控制部分以及自适应律[26]。Λ、h是自适应观测器的状态空间形式,输出信号为ω1、ω2。控制器参数[c0]T受到自适应律的调节,使得具有参数不确定性被控对象的实际输出与模型输出一致。
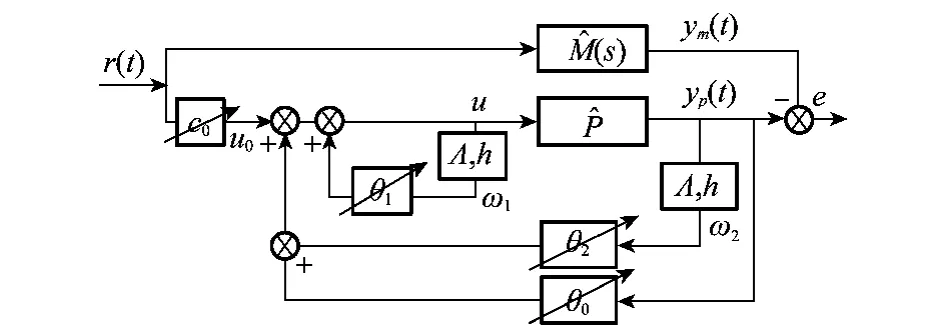
图4 n*=1DMRAC结构图(dr→r通道)
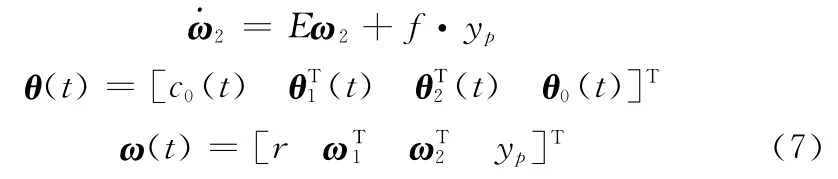
传统DMRAC控制律如式(6),写成线性参数形式如式(7)。c0是标量的阶数为n-2、n-1。

2.3 相对阶n*≥2控制结构及鲁棒自适应控制算法
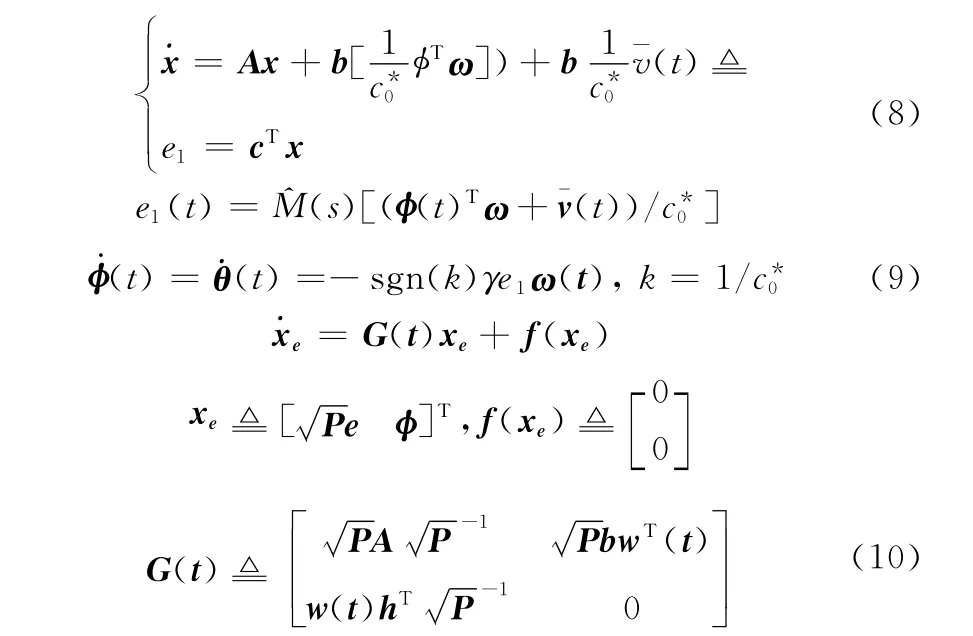
由于被控飞机dr→r通道传递函数相对阶为2。所以需要对图4的控制结构进行扩展[3]。记图4输出误差为e1,构造s域算子L(s)使得^M(s)L(s)严正实,则有式(11)的辅助误差和式(12)增广误差。
这里选用Ⅰ型误差系统[4],令L-1(s)=^M(s)得式(13)。带输入扰动的扩展的控制结构如图5所示。


图5 n*=2DMRAC结构图(da→φ通道)
回顾鲁棒自适应律[5],Dead Zone方法依赖一个假设边界已知的非参数不确定项‖ε(x,u,t)‖<εmax。当式(14)满足时,李氏函数的导数˙V≤0。其缺点是对εmax的保守估计会使误差变大从而出现“bursting”现象;Parameter Projection方法将自适应参数约束到一个包含理想参数的凸集边界上。其缺点是理想边界不容易估计,并且这种方法不能解决因输出扰动产生的参数漂移现象;σ-modification方法是在式(9)中加额外的参数线性阻尼项(式(15),σ为正实数),从而在有界扰动下能够保证有界稳定,但在理想情况下且存在PE时,不能使得误差系统渐近收敛。

关于e-modification方法(式(16),σ为正实数),根据文献[2]的Theorem 1,在理想情况和有充分激励下,可使式(8)、式(9)渐近收敛到原点,从而弥补了σ-modification的不足。对李氏函数V(e,φ)=eTPe+|k|φTφ/γ沿着式(8)、式(9)求导,观察式(17)、式(18),在补集Dc1中有˙V≤0。所以该方该也能在有扰时使误差系统有界稳定。

为了进一步减小e-modification律下误差‖e‖、‖φ‖的界限,缩小D1,并对e-modification律、σ-modification律取长补短,提出e-σ-modification混合自适应律,并针对外部扰动和输入未建模动态情况分析此自适应律的性能。
2.3.1 存在外部扰动¯v(t)
e-σ-modification混合自适应律如式(19),其中σ1为正实数。回顾n*=1误差方程(8),外部扰动通过被控对象的状态方程和输出方程引入,并归并为式(8)中的¯v(t)。利用式(19)得到n*=1时新的李氏函数的导数式(20),并在Dc2中有˙V≤0,其中D2如式(21)。将式(21)中关于‖e‖的不等式进一步化简,得到式(22)。对比式(21)和式(22),当条件满足时可以在e-modification律基础上进一步减小误差‖e‖的界限。下面分析选取σ1、σ2的方法:

令式(22)b中的开方项为零,则当σ1越小,收敛误差‖e‖也越小。与此同时,为了在e-modification律的基础上进一步收敛误差‖e‖,经过简单的推导,需满足如下不等式(23)。另外根据式(20)、式(21),选取σ1、σ2时还需检查是否满足(2σ1|e1|+2σ2)>0的条件。


对于n*≥2,根据误差方程如式(13),e-σ-modification自适应律需要进行归一化更正,如式(26),其中k=1/c*0。对/2有界,所以式(28)不等式右边一定正有界。
在同种情况下,e-modification律下‖φ‖的有界性如式(29)。所以若满足式(30),则e-σ-modification律得到的‖φ‖界限要小于e-modification律,并且σ2越大‖φ‖界限减小得越多。


注3 文献[3]的Theorem 2给出了n*≥2且存在未建模动态时,e-modification律保证系统其他信号有界性的条件,其在外部扰动下同样适用。由于在保证‖φ‖有界下,定理的证明与自适应律形式无关,所以在e-σ-modification律下其他信号的有界性仍能保证。
3 仿真实验
本节利用图3小型电动无人机(单发、V尾兼具升降舵和方向舵功能,翼展1.9m,机长1.95m,全机加有效载荷总重6.9kg)对级联式鲁棒自适应侧滑飞行控制进行数字仿真验证。仿真过程如下:初始飞行状态为无故障配平直飞,飞行高度500m,空速20.3m/s,同时接通零侧滑角保持控制器;10s时触发左副翼上偏20°卡死,并继续保持零侧滑角;30s时给出-9°侧滑角指令并持续至60s。控制器配置如下:控制器配平点选为初始无故障配平直飞的状态;da→φ和dr→r通道的全部自适应控制参数初始值设为0。下面对鲁棒外部扰动和未建模输入动态分别进行讨论。
3.1 存在外部扰动
对图1中的输出滚转角φ和偏航角速率r分别同时加入有界随机噪声|nφ(t)|≤1°和|nr(t)|≤0.1(°)/s。β的PI控制器参数为kp=5,ki=5。两个通道(相对阶分别为n*=2和n*=1)的e-σ-modification自适应增益分别记为γφ、σ1φ、σ2φ和γr、σ1r、σ2r,e-modification律没有σ2φ、σ2r增益。图6~图8分别为3组自适应增益下的部分状态响应。图9为空速、高度、舵偏响应。对比图6(a)、7(a)、8(a),当σ1r逐渐减小时,两种鲁棒自适应律下的输出误差e1r均明显减小,但e-σ-modification律的效果更好,验证了式(22)、式(25)及其相应的结论;对比图6(b)、7(b)、8(b),在σ1φ不变的基础上,当σ2φ不断增大时,2-范数‖φ‖也在不断减小,说明e-σmodification律在减小控制参数误差上比e-modification律更为优化,同时也验证了式(30)及其相应的结论。图6(c)是整个自适应侧滑飞行控制系统的β响应,10s故障后的保持调节过程和30s时的机动调节过程基本符合设计指标(5),并且稳态值与指令几乎相同。由于自适应控制器的配平值为仿真的初始配平状态,所以图6(d)中,控制参数在前10s基本没有改变。而在10s后和30s后,为了与参考模型输出匹配,控制参数发生变化。但因为噪声的影响,图6(a)中存在有界输出误差。图9显示控制系统将空速和高度均保持在仿真初始的预定值,并且舵偏值在允许范围内。
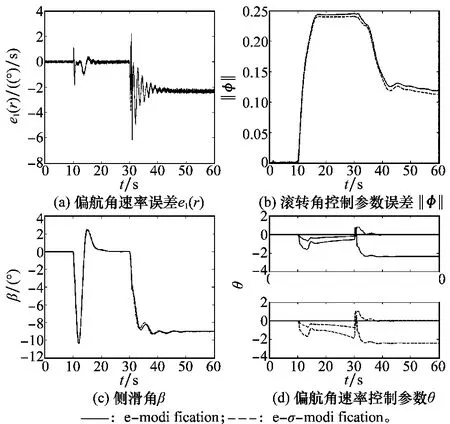
图6 γr=1,σ1r=1,σ2r=-0.1;γφ=1,σ1φ=5,σ2φ=5
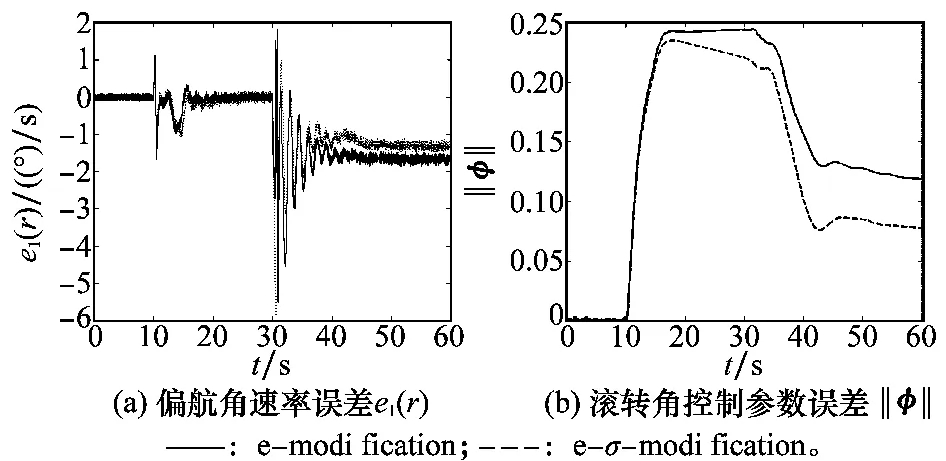
图7 γr=1,σ1r=0.5,σ2r=-0.25;γφ=1,σ1φ=5,σ2φ=50

图8 γr=1,σ1r=0.1,σ2r=-0.05;γφ=1,σ1φ=5,σ2φ=100

图9 γr=1,σ1r=1,σ2r=-0.1,γφ=1,σ1φ=5,σ2φ=5
3.2 存在输入未建模动态
假设da→φ和dr→r通道均存在舵输入未建模动态,并等效为二阶传递函数(34),ξ=0.6、ωn=20rad/s。依据式(34)和第2.3.2节假设3,加性未建模动态传递函数ΔP是稳定的,且Δyp(t)=ΔP(s)u(t)有界。

继续沿用上文的符号,图10~图12分别为3组自适应增益下的状态响应。图13为第一组增益下的速度、高度、舵偏响应。由于第2.3.2节已分析得出在某些假设下,未建模输入动态与外部扰动等价,所以对比图10(a)、图11(a)、图12(a),当σ1r增大时,两种自适应律下的输出误差e1r均明显会增大,但在e-σ-modification律下增幅较小,间接说明其优势,验证了式(24)的情况。同理,图10(b)、图11(b)、图12(b)说明了在减小‖φ‖上,e-σ-modification律比e-modification律更有效,即验证了式(30)及其相应的结论。图10(c)的β响应除了与第3.1节的结果基本一致外,e-σmodification律在10s前有一个短暂的高频震荡,这是由于负值增益σ2r绝对值若增大会减弱式(19)中e-modification成分的镇定扰动作用,同样也使得输出误差e1r发生振荡,如图10(a)所示。将此图时间轴增大如图13(d)所示。可以看出在这组参数下,随着时间增加,e1r最终为近似的等幅振荡。这是由于当控制器参数选择欠佳而激发具有特定频段幅相特性的不确定未建模舵动态发生振荡时,易造成e1r发生高频振荡,如图13(d)所示,但是对未建模舵动态情况下的稳定性证明保证其不会发散。相比而言,在图11(a)的控制参数下,e1r渐近收敛,与存在外部扰动情况的仿真效果近似。这说明当控制参数选择欠佳时,控制器对不确定未建模舵动态的鲁棒性相比对外部扰动会变差。

图10 kp=1,ki=1,γr=1,σ1r=25,σ2r=-3,γφ=1,σ1φ=5,σ2φ=5

图11 kp=1,ki=1,γr=1,σ1r=50,σ2r=-10,γφ=1,σ1φ=50,σ2φ=500

图12 kp=0.5,ki=0.5,γr=1,σ1r=100,σ2r=-15(a);kp=0.5,ki=0.5,γr=1,σ1r=100,σ2r=-15,γφ=1,σ1φ=50,σ2φ=50(b)

图13 kp=1,ki=1;γr=1,σ1r=25,σ2r=-3;γφ=1,σ1φ=5,σ2φ=5
4 结 论
本文针对常规布局飞机单侧副翼卡死下的侧滑飞行控制问题,提出一种基于e-σ-modification混合自适应律的级联式侧滑飞行控制方法。在给出整个侧向侧滑角级联回路稳定性证明后,对侧滑回路内状态r和φ的鲁棒自适应控制器进行了研究。针对输出扰动和未建模舵动态,通过选择合适的自适应增益,证明了e-σ-modification自适应律相比e-modification自适应律能够进一步减小输出误差和控制参数误差。文章的最后通过非线性仿真验证了整个控制系统的有效性。此控制方法不仅局限于侧滑飞行控制,其他具有级联式控制结构的应用也同样适用。
[1]Wesley M D,Girish C,Eric N J.Real-time system identification of a small multi-engine aircraft[C]∥Proc.of the AIAA Atmospheric Flight Mechanics Conference,2009.
[2]Kumpati S N,Anuradha M A.A new adaptive law for robust adaptation without persistent excitation[J].IEEE Trans.on Automatic Control,1987,32(2):134-145.
[3]Richard V M.Model reference adaptive control with an augmented error signal[J].IEEE Trans.on Automatic Control,1974,19(5):747-784.
[4]Kumpati S N,Yuan H L.Design of stable model reference adaptive controllers[M].USA:Academic Press,1980.
[5]Shankar S,Marc B.Adaptive control,stability,convergence,and robustness[M].USA.Prentice Hall,1989.
[6]Rajeev C,Tansel Y,Anthony J C,et al.Flight test results for kalman filter and H2modification in adaptive control[C]∥Proc.of the AIAA Guidance,Navigation and Control Conference,2010.
[7]Ali T K,Girish C,Anthony J C,et al.A comparison of two no-vel direct adaptive control methods under actuator failure accommodation[C]∥Proc.of the AIAA Guidance,Navigation and Control Conference and Exhibit,2008.
[8]Kilsoo K,Tansel Y,Anthony J C.K-modification in adaptive control[C]∥Proc.of the AIAA Infotech@Aerospace,2010.
[9]Eric N J,Anthony J C,Michael A T.Fault tolerance through direct adaptive control using neural networks[C]∥Proc.of the AIAA Guidance,Navigation,and Control Conference and Exhibit,2006.
[10]Xia Q Y,Xu J F.A design of triaxial unmanned rotor aircraft and its adaptive flight control system[J].Acta Aeronautica et Astronautica Sinica,2013,34(3):495-508.(夏青元,徐锦法.三轴式无人旋翼飞行器及自适应飞行控制系统设计[J].航空学报,2013,34(3):495-508.)
[11]Duan H J,Shi X P.Robust attitude control for micro air vehicle[J].Acta Armamentarii,2009,30(7):1004-1008.(段洪君,史小平.基于滑模自适应的飞行器鲁棒姿态控制[J].兵工学报,2009,30(7):1004-1008.)
[12]Xia Q Y,Xu J F,Zhang L.Design and simulation of an adaptive flight control system for unmanned rotorcraft[J].Robot,2013,35(1):98-106.(夏青元,徐锦法,张梁.无人旋翼飞行器自适应飞行控制系统设计与仿真[J].机器人,2013,35(1):98-106.)
[13]Zhang S J,Liu C S,Hu S S.Adaptive fault-tolerant control for multi-input-multi-output minimum-phase systems with actuator failures[J].Control Theory &Applications,2010,27(9):1190-1194.(张绍杰,刘春生,胡寿松.多输入多输出最小相位系统的的执行器故障自适应容错控制[J].控制理论与应用,2010,27(9):1190-1194.)
[14]Xiao B,Hu Q L,Ma G F.Robust fault tolerant attitude control for spacecraft under partial loss of actuator effectiveness[J].Control and Decision,2011,26(6):801-805.(肖冰,胡庆雷,马广富.航天器执行机构部分失效故障的鲁棒容错控制[J].控制与决策,2011,26(6):801-805.)
[15]Wang J H,Hu J B.Robust adaptive control of nonlinear systems with actuator dead-zone fault[J].Systems Engineering and Electronics,2012,34(1):142-148.(王坚浩,胡剑波.非线性系统执行器死区故障的鲁棒自适应控制[J].系统工程与电子技术,2012,34(1):142-148.)
[16]Dong X G,Cao X B,Zhang J X,et al.A robust adaptive control law for satellite formation flying[J].Acta Automatica Sinica,2013,39(2):132-141.(董晓光,曹喜滨,张锦绣,等.卫星编队飞行的鲁棒自适应控制方法[J].自动化学报,2013,39(2):132-141.)
[17]Qi X H,Yang Z J,Wu X B.Design of a robust flight control law based on simple adaptive control[J].Electronics Optics &Control,2010,17(5):6-13.(齐晓慧,杨志军,吴晓蓓.基于简单自适应控制的鲁棒飞行控制律设计[J].电光与控制,2010,17(5):6-9.)
[18]Wang S B,Wang X M,Li Y.Design of fly-by-wire longitudinal flight control law based on model reference adaptive control[J].Fire Control &Command Control,2012,37(3):158-164.(王首斌,王新民,李俨.模型参考自适应电传飞行控制系统纵向控制律设计[J].火力与指挥控制,2012,37(3):158-164.)
[19]Dong W H,Sun X X,Lin Y,et al.Direct model referencebackstepping adaptive control[J].Electronics Optics &Control,2008,23(9):981-986.(董文瀚,孙秀霞,林岩,等.一类直接模型参考Backstepping自适应控制[J].控制与决策,2008,23(9):981-986.)
[20]Zhang Z S,Chen H M,Wu C F,et al.Design and software realization of the predictive control synthesis strategy[J].Flight Dynamics,2011,29(4):56-59.(刘少华,段征宇.飞行器自适应控制参考模型建立方法研究[J].飞行力学,2011,29(4):56-59.)
[21]Francisco G,Rafael V,JoséáA.Adaptive control for aircraft longitudinal dynamics with thrust saturation[J].AIAA Journal of Guidance,Control,and Dynamics,2015,38(4):651-661.
[22]Tansel Y,Eric N J.Artificial basis functions in adaptive control[C]∥Proc.of the AIAA Guidance,Navigation,and Control and Co-located Conferences,2013.
[23]Nhan N.Adaptive control for linear uncertain systems with unmodeled dynamics revisited via optimal control modification[C]∥Proc.of the AIAA Guidance,Navigation,and Control and Co-located Conferences,2013.
[24]Ioannou P,Annaswamy A,Narendra K,et al.L1-adaptive control stability,robustness,and interpretations[J].IEEE Trans.on Automatic Control,2014,59(11):3075-3080.
[25]Cheng P F,Wu C F,Duan X J,et al.An approach of flight trim for wing-damaged asymmetric aircraft[C]∥Proc.of the 32nd Chinese Control Conference,2013.
[26]Jean-Jacques E S,Li W P.Applied nonlined control[M].USA:Prentice Hall,1991.
Research on robust cascaded sideslip flight control based on e-σ-modification hybrid adaptive law
CHENG Peng-fei,WU Cheng-fu
(Science and Technology on UAV Laboratory,Northwestern Polytechnical University,Xi’an 710065,China)
An e-σ-modification hybrid adaptive law based cascaded sideslip flight control scheme is proposed aiming at control surface failures of conventional configuration.The stability proof of the sideslip cascaded loop is given and then follows the expression between regulating time ts and PI control parameters under the assumption of faster response of the roll angle and the yaw rate than those of the sideslip.In the presence of perturbation and unmodeled input dynamics,the fundamental model reference adaptive control(MRAC)schemes for roll angle and yaw rate transfer-tunnels of relative degrees equal to one or greater are constructed respectively.The Lyapunov method guarantees that all signals of the robust adaptive control inner-loop updated by the e-σ-modification law are uniformly bounded.Further the method of choosing adaptive gains to minish error boundaries of the output and control parameter of the e-modification law is also analyzed.The simulation results validate the effectiveness and show that the method not only owns satisfactory sideslip angle holding and tracking performances,but also shrinks error boundaries mentioned above in an allowable deflection angle range of control surfaces.
control surface failures;e-σ-modification hybrid adaptive law;cascaded sideslip flight control;robust adaptive control;error boundaries
V 249.1
A
10.3969/j.issn.1001-506X.2015.08.20
程鹏飞(1986-),男,博士研究生,主要研究方向为飞行控制、飞行动力学。
E-mail:cpf_123@163.com
吴成富(1962-),男,教授,博士研究生导师,硕士,主要研究方向为综合飞行控制技术。
E-mail:chiefwu@nwpu.edu.cn
1001-506X201508-1844-08
网址:www.sys-ele.com
2014-07-22;
2014-11-03;网络优先出版日期:2015-01-06。
网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20150106.1218.006.html
解放军总装预研项目(513250202)资助课题
