基于微多普勒的弹道多目标分离方法
2015-05-25胡晓伟童宁宁胡国平王宇晨
胡晓伟,童宁宁,胡国平,王宇晨
(空军工程大学防空反导学院,陕西西安710051)
基于微多普勒的弹道多目标分离方法
胡晓伟,童宁宁,胡国平,王宇晨
(空军工程大学防空反导学院,陕西西安710051)
弹道多目标分离对弹道导弹早期预警和识别具有重大意义。目前弹道目标微动提取与识别的研究都是基于“单目标多散射点”和“多目标单散射点”的假设,而对实际中弹道“多目标多散射点”的情况缺乏考虑。针对这一问题,首先分析了进动锥体弹头和摆动锥体诱饵的微多普勒形式,得到了同一目标不同散射点的微多普勒具有相同的周期性。对于多目标分离问题,首先利用Radon变换估计平动参数实现了多目标平动补偿;之后通过分析多目标时频图循环平稳性,发现弹道多目标分离本质上是多个二维一阶循环平稳(first-order cyclostationary,FOCS)分量的分离问题;其次,提出了一种基于二维FOCS处理的多目标分离方法;最后,通过仿真验证了该方法的有效性和在强噪声下的稳定性。
微多普勒;弹道目标;平动补偿;多目标分离;一阶循环平稳
0 引 言
在弹道导弹防御中,对弹道目标的分类和识别是一项十分关键的任务。目前,国内外关于弹道目标识别方面的研究大多着眼于空间可分离的单目标的特征提取与识别,然而实际反导作战中防御对象往往是空间不可分离的多目标。如果不能在早期预警时对多目标进行有效的检测和分离,就会给后续防御系统带来巨大的实时性压力。但目前针对单目标的处理方法对多目标不再适用。因此,研究可行高效的弹道多目标分离方法是当前弹道导弹防御领域亟需解决的一个问题。
对于空间不可分辨的目标,由目标微动引起的微多普勒变化[1-3]为不同目标的分离与识别提供了可能。目前国内外关于微多普勒方面已进行了大量研究,在微动目标特征提取[4-6]、微动成像[7-10]以及分类识别[11-13]等方面取得了许多研究成果。但这些研究都是针对存在多个等效散射中心的单目标,不适用于同时包含不同微动形式的弹道多目标。针对微动多目标,文献[14]通过自适应chirplet变换实现多目标信号的拟合,进而获得各目标的微动分量,之后基于hough变换进行直线检测最终得到多目标的数量;文献[15]提出利用Viterbi算法与B分布联合实现多目标微多普勒特征的提取,以分辨多个微动目标。这两篇文献都认为每一个目标都只存在一个强散射点,此时多目标的分离就简化为多条多普勒线的提取。然而实际情况是多目标中每个目标都有不只一个强散射点,多目标的时频图应该是“多目标多散射点”微多普勒的叠加,这种情况下以上两种方法的有效性就不能保证。针对这个问题,本文跳出试图从时频图中分离出每条曲线的思路,基于同一个目标的微多普勒具有周期性,通过分析多目标的时频图,得出多目标分离可以归结为一个多分量的二维FOCS信号的分离问题。由于目前的FOCS处理方法都是针对一维信号,本文提出一种针对二维FOCS处理的多目标分离方法,实现了不同目标散射点的分离。
1 微多普勒分析
弹道目标包括弹头、弹体碎片、轻诱饵和重诱饵等多种目标。微动形式不同是以上多种目标最为显著的差异[16]。弹头为维持恒定的再入角度,需要维持进动姿态;而较轻的弹体碎片、诱饵通常作随机滚动;重诱饵由于不存在姿态控制,会处于不稳定的摇摆状态。本文以进动锥体和摆动锥体为例分析弹道目标的微多普勒。
1.1 弹头微多普勒
进动锥体弹头模型如图1所示。O-XYZ为参考坐标系,和雷达坐标系平行,目标在雷达坐标系中的俯仰角为β、方位角为0;弹体坐标系O-xyz的y轴为目标的对称轴,其在参考坐标系中的初始俯仰角为βs、初始偏航角和横滚角均为0;进动坐标系O-xpypzp的yp轴为目标的进动轴,其在参考坐标系中的初始俯仰角为βp、初始偏航角和横滚角均为0;雷达视线和目标进动轴在参考坐标系中的单位方向矢量分别为

首先,分析锥顶P0。P0为理想散射点,因为其具有旋转对称性,所以分析时仅需要考虑目标的进动。设弹体坐标系中,Ω为P0的进动角速度,r0=(0,y0,0)T为其位置矢量。令λ为波长,则t时刻P0的微多普勒形式[17]可表示为

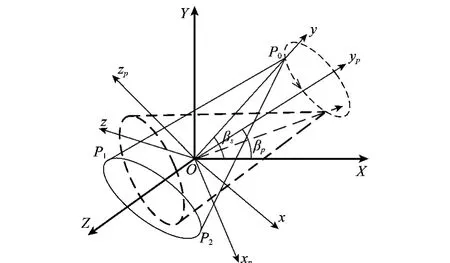
图1 弹头的进动模型
除锥顶以外,锥体弹头的其余散射中心都位于目标对称轴与雷达视线所在平面与底面边缘的交点处[18](见图1 P1点和P2点所示)。这些点均是滑动散射点,其具有与理想散射点不同的运动规律。下式为此类滑动散射点t时刻的微多普勒[17]表达式

式中,F(t)=cosβcos(βs-βp)sinΩt+sinβsin(βs-βp);a是底面半径;d表示质心与底面间的距离。
1.2 诱饵微多普勒
摆动锥体诱饵的模型如图2所示。同样O-XYZ为参考坐标系,与雷达坐标系平行,目标在雷达坐标系中的俯仰角为β、方位角为0;弹体坐标系O-xyz的y轴为目标的对称轴,其在参考坐标系中的初始俯仰角为βs、初始偏航角和横滚角均为0;nlos=[cosβsinβ0]T是参考坐标系中雷达视线单位方向矢量;对于一给定的方向矢量OC,其与Oy确定平面yOC,诱饵在yOC内以O为中心作摆动,则摆动角可表示为θ(t)=θssinωst。
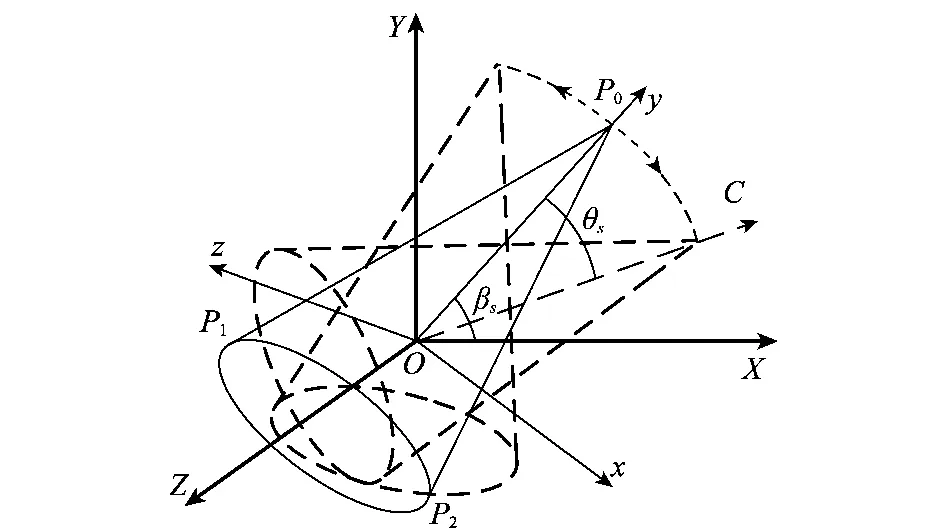
图2 锥体诱饵的摆动模型
设P为诱饵上一个位于XOY平面上的散射,rP=(xP0,yP0,0)T是其在弹体坐标系中的初始位置矢量。P在参考坐标系中的矢量可表示为OP=RinitrP,其中Rinit是与初始姿态相关的旋转矩阵;参考坐标系中,P在t时刻的位置矢量表示为r(t)=R(t)rP。其中R(t)是t时刻的旋转矩阵,弹体坐标系相对参考坐标系的偏航角和横滚角为0、俯仰角为βs(t),且βs(t)=βs-θssinωst。
则t时刻P点的径向距离为

可以得到P点的微多普勒为

锥体诱饵上的等效散射中心在摆动模型下均属于理想散射点,不存在滑动的情况,因此其微多普勒表达式均服从式(6)的形式。
由以上分析可知,进动弹头的滑动散射点和摆动诱饵的散射点微多普勒形式复杂,当多个目标的多个散射点叠加在一起时,利用hough变换等方法提取微多普勒曲线将十分困难。
通过观察式(3)、式(4)和式(6)可以发现,各散射点微多普勒满足以下性质:

即同一目标不同散射点的微多普勒具有相同的周期,且这一周期与目标主体的运动周期相一致。
2 多目标分离
2.1 多目标平动补偿
要利用微多普勒信息进行多目标分离,首先要补偿由目标平动导致的多普勒倾斜。由于多目标微多普勒时频图的复杂性,导致用于单目标的平动补偿方法[5]将不再适用。考虑弹道中段目标运动的平稳性,在时频域近似为线性倾斜,本文利用Radon变换的方法来检测多目标在时频域的线性程度,估计平动参数实现平动补偿。
二维空间R2中的Radon变换可表示为

式中,g(x,y)为连续二维函数;ρ为坐标原点到直线的距离;δ为dirac-delta函数;D为积分平面。
通过式(8)多目标时频图将变换为Radon域上的一个点,因此目标运动参数的估计就可以转化为该点峰值位置的检测。为提高参数估计精度,在检测亮点峰值位置时可以利用最小熵准则和高斯函数拟合的方法估计峰值位置。之后利用时频域与Radon变换域的相互转换关系,对目标的平动参数进行计算,进一步设计相应的补偿函数,对回波进行平动补偿。
2.2 循环平稳性分析
经过平动补偿后,就可以研究基于微多普勒的多目标分离方法。首先对多目标时频域信号进行分析。
设目标i上的第j个散射点的微多普勒为fij(t),目标i主体的运动周期为Ti,则由式(7)有fij(t)=fij(t+Ti)。
定义二维时频函数

它实际上反映了fij在理想情况下的二维时频图,且满足Fij(t,f)=Fij(t+Ti,f)。
则目标i独自存在时的时频域信号可以表示为

式中,δi(t,f)表示目标i时频域信号中存在的二维随机噪声。记随机信号Ii(t,f)的期望为mIi(t),则有

式(11)表明目标i的时频域信号的期望呈周期变化,即随机信号Ii(t,f)是一阶循环平稳的。则多目标的时频域信号可表示为

由式(10)可知,I(t,f)的数学期望应满足mI(t)=mI(t+T),其中T为所有Ti的最小公倍数。
2.3 多目标分离方法
由第2.2节可知,多目标时频信号是多个二维FOCS分量的叠加。多目标分离就变成从一个多分量FOCS信号中分离各个FOCS分量的问题。这里由于时频信号是一个二维信号,一般的针对一维FOCS信号的处理方法将不再适用。本文提出一种针对二维FOCS的多分量分离方法。
首先将I(t,f)进行二维离散化得到I(n,m),当n取某个定值时,记I(n,m)=I(n)。对于一个固定的n0,定义I(n0)和I(n)的0延迟互相关Rn0(n)=I*(n0)I(n),这是一个关于n的函数。
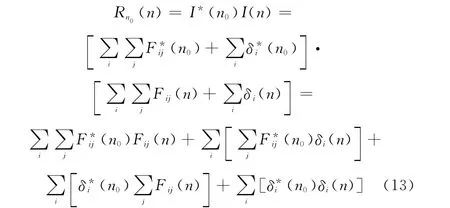
因为δi(n)为随机噪声序列,与其他任意序列不相关,因此式(13)后三项的值都很小,Rn0(n)基本由决定。又Fij(n)=Fij(n+Ti),所以Rn0(n)将在n=n0+kTi(k=0,1,…;i=1,2,…)处周期性地出现峰值,且不同目标对应不同的峰值。通过检测这些周期性峰值,就可以确定多目标中目标的数量,同时根据它们各自的运动周期,初步判断各个目标的类型。该多目标分离方法的具体步骤如下:
步骤1 对运动补偿后的目标回波,利用时频分析方法获得目标群的时频图I(n,m);
步骤2 令n0=1,计算I(n0)和I(n)的0延迟互相关Rn0(n),n=n0,n0+1,…,N-1,N为互相关函数Rn0(n)的长度;
步骤3 对于单个I(n0)求互相关,得到的相关函数可能由于I(n0)自身的特殊性和噪声的影响,使得对目标周期性的反映出现偏差,这里可以考虑对多个I(n0)序列计算互相关数,通过累计多个Rn0(n)序列,降低偶然性,提高对目标周期的反映精度。具体方法是令n0=n0+1,重复步骤(2),得到Rn0+1(n),n=n0,n0+1,…,N;
步骤4 设置迭代次数K,重复步骤(3)得到K个Rn0(n)序列,为使每次相关处理对最终结果的贡献一致,将每一个Rn0(n)序列进行归一化处理,即Rn0(n)/max{Rn0(n)}。最后将K次相关处理结果合成,得到最终的处理结果R(n)=
步骤5 得到时频相关处理结果后就可以进行多目标分离:
步骤5.1 对R(n)序列进行峰值搜索,得到峰值位置序列{ni};
步骤5.2 为排除干扰设定阈值R′,剔除R(ni)<R′的峰值位置,得到新的峰值位置序列{ni};
步骤5.3 在{ni}中寻找R(ni)≈R(1)的位置ni,ni即为多目标中各目标周期的最小公倍数,后续的序列搜索范围可以限制在[1,ni];如果不存在满足条件的ni,则进行下一步;
步骤5.4 将序列中周期出现的,并且各个位置上的峰值大小基本一致的序号归类,视为同一目标;
步骤5.5 统计序列中序号的种类,即为多目标的个数;同时根据诱饵相对弹头质量较小,因而微动频率会较高[19]的先验信息,利用已得到的各类目标的周期,即可判定各目标的类型。域发生折叠,提前利用雷达测速值对回波进行了预处理[5]。

图3 多目标回波时频变换结果
从图3中可以看到,因为雷达视线遮挡,弹头、诱饵均有1个散射点观测不到,因此多目标时频图仅包括了4条不同变化规律的微多普勒曲线。对图3时频图进行Radon变换,变换域结果如图4所示。应用最小熵准则和高斯拟合方法估计的平动参数速度v=-4.682m/s、加速度a=2.487m/s2。
3 实验仿真
3.1 方法有效性验证
(1)仿真参数设置
雷达参数设置:雷达工作频率f=3.75GHz,重频PRF=1 000Hz,脉冲积累时间T=5s。
多目标参数设置:目标群包括两个目标:弹头和诱饵,二者为等比例锥体,锥体底面半径1m,锥长3m,质心位于锥体轴线上,与底面相距1m。两个目标位于同一个雷达波束,初始方位角、俯仰角分别为0、π/4;目标群与雷达的初始径向距离为1 000km,初始速度-1 411m/s,平均加速度2.47m/s。弹头进动频率1Hz,进动角10°,进动轴在雷达坐标系中的偏航、俯仰和横滚角分别为0、3π/4、0;诱饵摆动频率1.5Hz,幅度20°。
(2)多目标平动补偿
雷达与目标的相对空间位置会导致目标上某些散射点被遮挡,因此在回波仿真中需考虑散射点的遮挡效应。而本文的多目标分离方法主要是基于同一目标上所有散射点的微动曲线具有相同的周期性,因此目标上某些散射点被遮挡并不会影响后续对多目标的分离处理。
在上述参数条件下仿真多目标回波数据,利用Gabor变换时频分析工具,提取目标回波的时频图如图3所示(时域Gabor系数设为250)。为了避免多普勒信号在时频

图4 群目标时频图Radon变换
利用估计的平动参数设计补偿函数,对回波进行补偿;对补偿后回波再次进行时频变换结果如图5所示。

图5 补偿后回波时频变换结果
(3)多目标分离
利用本文提出的二维FOCS处理方法,对多目标时频图进行处理。为提高处理结果的稳定性,利用步骤4的方法进行迭代处理。图6仿真了迭代次数K=90时的二维FOCS相关处理结果(相关函数序列长度N=160)。

图6 二维FOCS相关处理结果
对图6所示的相关函数进行峰值搜索,检测到的峰值位置及相应函数值如表1所示。
从表1中可以看到R(101)≈R(1),可以确定周期T=100为多目标的最小公周期,搜索范围可以缩小至[1,101]。设定阈值R′=25,剔除干扰峰值ni=80。在剩余的峰值中,ni=22处峰值因为没有周期性出现,可以排除;ni=34、68、101处峰值以周期T1≈33周期性出现,所以判为一类;ni=50、101处峰值以周期T2≈50周期性出现,所以也判为一类;并且T1和T2的最小公倍数为T,因而可以最终判定:多目标中存在两个目标,且目标的运动周期分别为s;进而利用诱饵微动频率高于弹头的先验信息,判定目标1为诱饵摆、目标2为弹头。该结果与设置的仿真参数相吻合,从而验证了该方法是有效的。

表1 峰值搜索结果
(4)实时性仿真
为验证以上多目标分离方法的实时性,将其与文献[15]中的多目标分辨方法进行对比实验。分别利用文献[15]方法和本文方法对图5进行处理,并用MATLAB中tic和toc命令记录两种方法的处理时间。图7仿真了利用文献[15]的Viterbi算法对图5中微多普勒曲线的提取结果,从中可以看到提取的曲线能够很好地反映目标微多普勒的变化过程。进而对各曲线做FFT即可得到与本文方法相同的多目标分离结果,说明此时两种方法在有效性上是一致的。在算法实时性上,文献[15]方法的处理时间为8.952 569s,而本文方法的处理时间仅为0.086 205s。这说明了本文方法的运算量更小、实时性更强。

图8 强噪声条件下的多目标时频图
3.2 强噪声下方法稳定性验证
为了证明本文方法在强噪声条件下的稳定性,将多目标回波中加入高斯白噪声,图8为信噪比-10dB时的时频变换结果。图9为对图8进行Radon变换的结果,图10为平动补偿后结果。

图10 强噪声条件下的平动补偿结果
从图中可以看到,加入噪声后,原时频图中微多普勒曲线几乎被噪声淹没。此时仍用文献[15]的方法对图10中的微多普勒曲线进行提取,结果如图11所示。从图中可以看到,由于噪声的影响,此时提取的曲线已不能反映目标微多普勒的变化情况,说明文献[15]的方法在强噪声条件下是失效的。

图11 强噪声下文献[15]方法提取的微多普勒曲线
用本文方法对以上噪声条件下的时频图进行处理,迭代次数K=90时的累计相关处理结果如图12所示。
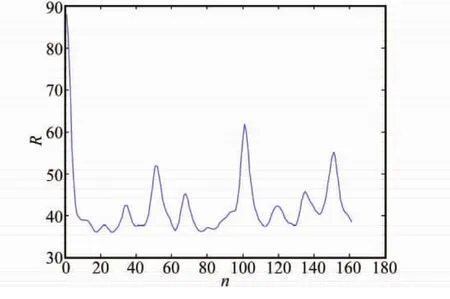
图12 强噪声下相关处理结果
从以上结果可以看到,n=1处的值明显高于序列其他处的值,这是由于噪声不同时刻不相关,序列当前时刻的自相关一定会大于与其他任何时刻的互相关。由于不存在R(ni)≈R(1)的ni,因此峰值搜索范围为整个序列。设定阈值R′=38,剔除干扰峰值后的峰值搜索结果如表2所示。

表2 峰值搜索结果
在表2结果中,ni=34、68、101、135处峰值以周期T1≈33周期性出现,所以判定多目标中存在一个运动周期为5=0.66s的目标1;ni=51、101、151处峰值以周期T2≈50周期性出现,所以判定存在一个运动周期为s的目标2;ni=12、119处峰值没有周期性出现,可以排除;ni=101处峰值正好位于T1和T2的最小公倍数的位置,且峰值大小符合T1和T2的叠加,因而可以确定该峰值是目标1和目标2共同作用的结果,不存在新目标。从而验证了本文方法对强噪声条件下的多目标分离同样是有效的。
4 结束语
针对弹道多目标分离问题,本文摒弃以往试图从时频图中检测微动曲线的分析方法,将多目标时频图作为一个整体来考虑,基于同一目标微动曲线的周期相关性,分析了多目标时频信号的循环平稳性,提出一种基于二维FOCS处理的弹道多目标分离方法,并仿真验证了该方法对多目标分离的有效性及在强噪声条件下的稳定性。
本文所在工作的意义在于:
(1)本文提出的方法将时频图作为整体进行考虑,通过分析时频图的整体特征提取微动信息,这为微动领域解决多分量高噪声下微多普勒提取与分离的难题提供了新思路;
(2)本文方法与其他微动提取方法相比,只需进行较少的乘加运算,运算量小,可操作性强,十分符合弹道导弹防御对实时性的要求,对于提前弹道目标的早期预警具有实际意义。
[1]Chen V C,Li F,Ho S S,et al.Micro-Doppler effect in radar:phenomenon,model and simulation study[J].IEEE Trans.on Aerospace Electronic Systems,2006,42(1):2-21.
[2]Thayaparan T,Abrol S,Riseborough E,et al.Analysis of radar micro-Doppler signatures from experimental helicopter and human data[J].IEEE Proceedings on Radar,Sonar and Navigation,2007,1(4):289-299.
[3]Chen V C,Miceli W J,Himed B.Micro-Doppler analysis in ISAR-review and perspectives[C]∥Proc.of the International Radar Conference,2009:1-6.
[4]Lei P,Wang J,Sun J.Analysis of radar micro-Doppler signatures from rigid targets in space based on inertial parameters[J].IET Radar Sonar Nav.,2011,5(2):93-102.
[5]Yang Y C,Tong N N,Feng C Q,et al.Micro-motion modeling based on homogeneous coordinate[C]∥Proc.of the IEEE International Conference on Signal Processing System,2011.
[6]Luo Y,Zhang Q,Qiu C W,et al.Micro-Doppler effect analysis and feature extraction in ISAR imaging with stepped-frequency chirp signals[J].IEEE Trans.on Geoscience and Remote Sensing,2010,48(4):2087-2098.
[7]Pan X Y,Wang W,Fu Q X,et al.Characteristics analysis of targets with rotational micro-motion in ISAR imaging and jamming[J].Systems Engineering and Electronics,2013,35(7):1396-1402.(潘小义,王伟,傅其祥,等.旋转微运动ISAR成像及干扰特性分析[J].系统工程与电子技术,2013,35(7):1396-1402.)
[8]Pan X Y,Wang W,Feng D J,et al.Rotational micro-motion modulated jamming for countering ISAR based on intermittent sampling repeater[J].Progress in Electromagnetics Research,2013,36:41-56.
[9]Ai X F,Huang Y,Zhao F,et al.Imaging of spinning targets via narrow-band TR-R bistatic radars[J].IEEE Geoscience and Remote Sensing Letters,2012,10(2):362-366.
[10]Bai X,Zhou F,Xing M,et al.High resolution ISAR imaging of targets with rotating parts[J].IEEE Trans.on Aerospace and Electronic Systems,2011,47(4):2530-2543.
[11]Han X,Du L,Liu H W,et al.Classification of micro-motion form of space cone-shaped objects based on time-frequency distribution[J].Systems Engineering and Electronics,2013,35(4):684-691.(韩勋,杜兰,刘宏伟,等.基于时频分布的空间锥体目标微动形式分类[J].系统工程与电子技术,2013,35(4):684-691.)
[12]Ai X F,Li Y Z,Wang X S,et al.Some results on characteristics of bistatic high-range resolution profiles for target classification[J].IET Radar,Sonar and Navigation,2012,6(5):379-388.
[13]Gao H W,Xie L U,Wen S L.Micro-Doppler signature extraction from ballistic target with micro-motions[J].IEEE Trans.on Aerospace and Electronic Systems,2010,46(4):1969-1982.
[14]Huang X H,He X,Xin Y L,et al.Resolving multiple targets with Micro-motions based on time-frequency feature with lowresolution radar[J].Journal of Electronics &Information Technology,2010,32(10):2342-2347.(黄小红,贺夏,辛玉林,等.基于时频特征的低分辨雷达微动多目标分辨方法[J].电子与信息学报,2010,32(10):2342-2347.)
[15]Guan Y S,Zuo Q S,Liu H W.Micro-motion targets resolution in a high noise environment[J].Journal of Electronics &Information Technology,2010,32(11):2630-2634.(关永胜,左群声,刘宏伟.高噪声环境下微动多目标分辨[J].电子与信息学报,2010,32(11):2630-2634.)
[16]Camp W W,Mayhan J T,O’Donnell R M.Wideband radar for ballistic missile defense and range doppler imaging of satellites[J].Lincoln Laboratory Journal,2000,12(2):267-280.
[17]Ma L,Liu J,Wang T,et al.Micro-Doppler characteristics of sliding-type scattering center on rotationally symmetric target[J].Science in China Series F Information Sciences,2011,54(9):1957-1967.
[18]Yao H W,Wei X Z,Xu S K,et al.Micro-motion characteristics of non-ideal scattering centers of midcourse targets with precession[J].Acta Electronica Sinica,2012,40(9):1844-1851.(姚辉伟,魏玺章,徐少坤,等.弹道中段进动目标非理想散射中心微动特性研究[J].电子学报,2012,40(9):1844-1851.)
[19]Zhou W X.BMD radar target recognition technology[M].Beijing:Publishing house of electronics industry,2011.(周万幸.弹道导弹雷达目标识别技术[M].北京:电子工业出版社,2011.)
Multi-ballistic targets resolution based on micro-Doppler
HU Xiao-wei,TONG Ning-ning,HU Guo-ping,WANG Yu-chen
(Air and Missile Defense College,Air Force Engineering University,Xi’an 710051,China)
Multi-ballistic targets resolution is significant for ballistic missile early warning and recognition.At present,the study on the micro-motion ballistic missile is confined in the assumption of“a single target with multi-scattering centers”and“multi-targets with a single scattering center”.To solve this problem,micro-Doppler of precessing missile and swinging decoy are firstly derived.And it proves that the micro-Doppler with the same target and different scattering centers has the same cycle.Then radon transform is applied to compensate the translation.After analyzing cyclostationarity of multi-targets time-frequency plane,we regard multi-ballistic targets resolution as a problem to resolve a signal composed of several two-dimensional first-order cyclostationary(FOCS).A method based on the two-dimensional FOCS is proposed to resolve multi-targets.Finally,simulations are given to validate the effectiveness and the robustness in high noise environment of this method.
micro-Doppler;ballistic targets;translation compensation;multi-targets resolution;first-order cyclostationary(FOCS)
TN 957.51
A
10.3969/j.issn.1001-506X.2015.08.04
胡晓伟(1987-),男,博士研究生,主要研究方向为雷达目标成像与识别。
E-mail:601237134@qq.com
童宁宁(1963-),女,教授,博士,主要研究方向为雷达阵列信号处理。
E-mail:18092629021@189.com
胡国平(1964-),男,教授,博士,主要研究方向为雷达信号处理。
E-mail:hgp6068@163.com
王宇晨(1988-),女,助教,硕士研究生,主要研究方向为信号处理。
E-mail:13289322268@163.com
1001-506X201508-1734-07
网址:www.sys-ele.com
2014-07-04;
2014-11-21;网络优先出版日期:2015-03-30。
网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20150330.0902.013.html
国家自然科学基金(61372166)资助课题
