风挡雨刷控制系统设计
2015-05-22李云红李晓东
张 恒,李云红,李晓东,宋 鹏
(西安工程大学 电子信息学院,陕西 西安710048)
0 引 言
雨刷系统是汽车的重要控制系统之一,传统的手动机械雨刷在使用过程中,会分散驾驶员的注意力.在雨雪天气,往往成为发生交通事故的重要隐患.针对传统雨刷的缺点,李艳明[1]等提出了一种基于智能功率开关BTS6143D的车辆雨刷电机启动控制方案,采用脉宽调制(PWM)起动方式,使车辆负载转速平稳上升,减小了起动时的机械冲击以及电流冲击,实现了雨刷电机平稳无级启动的过程;张朝祥[2]等则通过雨量传感器检测雨量大小,提出一种基于模糊控制理论的雨刷控制器,克服了非线性因素对系统造成的影响;张奎[3]等提出将智能PID控制技术应用到直流电机的控制中,自动调整控制参数,从而获得最佳的过程响应曲线.通过对目前雨刷控制系统的比较,本系统采用PWM[4-5]方法对直流电机调速,并在分析了模糊控制理论及雨刷同步摆动规则的基础上,利用STM32作为ARM微控制单元,提出了一种基于模糊控制[6-9]的智能雨刷系统.该系统将转速偏差与转速偏差变化量模糊化为模糊控制器的输入语言变量,根据所制定的一套模糊控制规则来调节PWM的输出变量,并以此来驱动两直流电机[10],使两个风挡雨刷同步工作,并在系统中设计了位置检测的功能.在控制策略和控制算法的基础上,用Matlab/Simulink软件进行仿真和验证,对比了PID控制和模糊控制的控制效果,从而提高了系统的响应速度和稳态性能.
1 模糊控制算法
在风挡雨刷同步控制系统中,有许多非线性因素都会对雨刷同步造成影响.这样,就需要用人的经验知识来调整PWM信号的占空比,使两个雨刷同步摆动.因此,把模糊控制技术运用到雨刷同步器,可以使系统有良好的控制效果.
模糊控制器是模糊控制的关键,本模糊控制器的输入变量是两个雨刷到达复位位置的时间偏差E和时间偏差变化率Ec,输出变量是PWM脉宽调制信号占空比D的增量VD.在进行输入变量模糊化时,时间偏差E在其论域上定义7个模糊集隶属度函数,相应的语言变量为负大(NB)、负中(NM)、负小(NS)、零(0)、正小(PS)、正中(PM)、正大(PB),其隶属度函数为三角形.时间偏差变化率Ec在其论域上定义5个模糊集隶属度函数,相应的语言变量为负大(NB)、负小(NS)、零(0)、正小(PS)、正大(PB),其隶属度函数为三角形.输出变量PWM占空比增量VD在其论域上定义7个模糊集隶属度函数,相应的语言变量为负大(NB)、负中(NM)、负小(NS)、零(0)、正小(PS)、正中(PM)、正大(PB),其隶属度函数为三角形.模糊控制规则如表1所示.
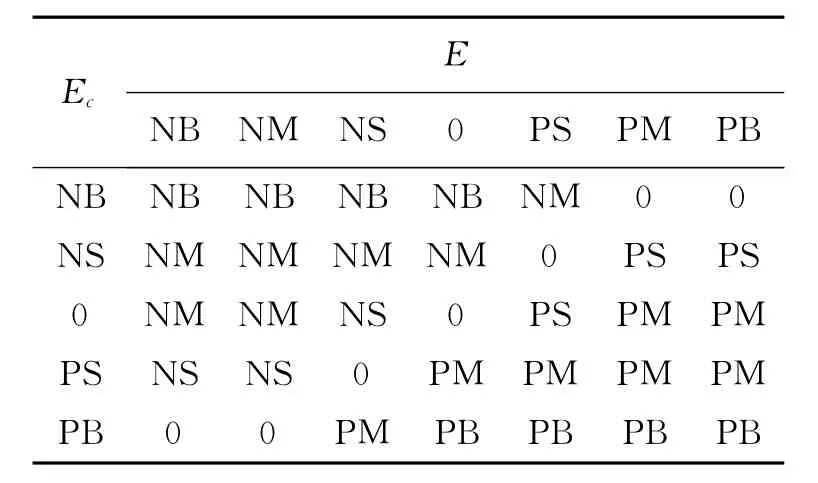
表1 模糊控制规则Table 1 Fuzzy control rules
2 系统设计
风挡雨刷控制系统由左、右各1台雨刷控制器组成,控制模块采用STM32作为ARM微控制单元.左、右控制开关可分别控制左、右雨刷器工作,分间歇、低速、高速和复位停止4种工作状态.当左、右控制开关所处不同档位时,左、右雨刷各自独立工作,不要求同步.当左、右雨刷同时开启到同一个档位时,系统控制左、右雨刷同步摆动.控制系统结构如图1所示.
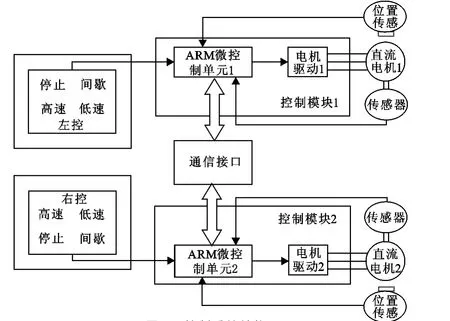
图1 控制系统结构Fig.1 Structure of control system
2.1 硬件设计
根据总体设计,硬件控制模块包括ARM最小系统、雨刷电机、电动机驱动模块、档位显示模块、串口通信模块等部分,另外,还应具有位置检测功能及其他功能,如微控制单元产生PWM信号,针对控制面板输入信号而设计输入检测电路等.硬件控制系统设计框图如图2所示.
2.1.1 输入检测模块 输入检测模块能够实现高速、低速、间歇、停止4个档位的检测,电路采用光电隔离,并选用滤波电容去除控制面板开关抖动以及各种干扰的影响.
2.1.2 位置检测模块 由于雨刷电机和蜗轮蜗杆连成一体,将位置传感器安装在蜗轮蜗杆处.位置传感器每隔1.5s送出一
个脉冲信号给微控制单元,当雨刷接到停止指令,控制器进行归位信号检测,如果在一个雨刷循环周期内未检测到归位信号,则间歇性启动电机并向归位方向运转最多3次.如果还未检测到归位信号,则判定为机械性故障,输出报警信号.
2.1.3 串口通信模块 串口通信电路主要实现雨刷的精准定位和同步控制.两个微控制单元通过MAX3485芯片通信,分时收发数据信息,通过比较、处理、更新两个微控制单元的输出控制信号、雨刷位置信息等,达到使两组雨刷器同步工作的目的.
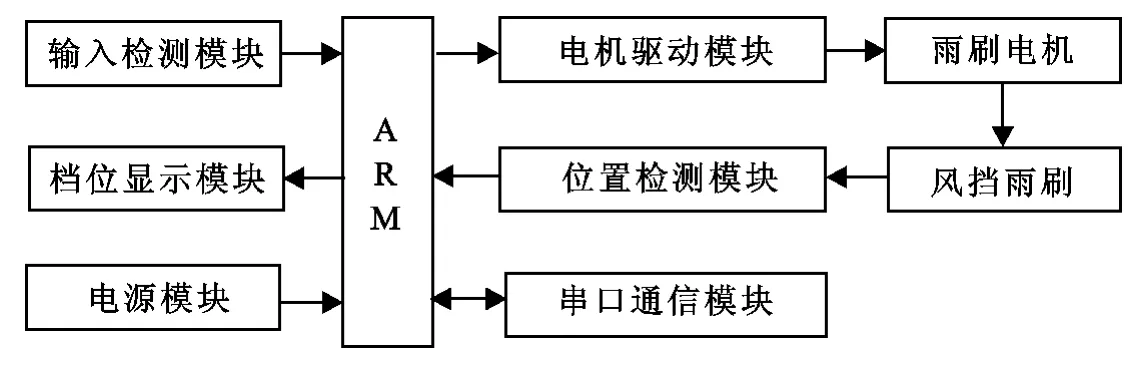
图2 硬件控制系统设计Fig.2 Hardware block diagram of the control system design
2.2 软件设计
系统功能的实现除了硬件的支持之外还需要通过软件设计来进行补充,高效、紧凑、模块化的软件流程设计不但可以使得控制器的实时性、稳定性更高,而且能够使得调试的过程更加容易.主程序流程图如图3所示.
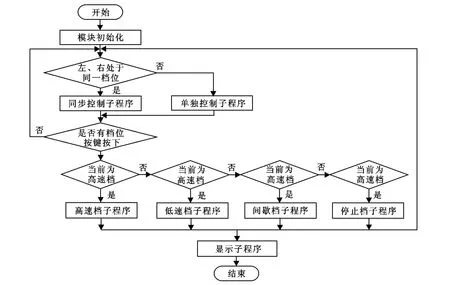
图3 主程序流程Fig.3 The main program block diagram
3 结果与分析
本设计提出了一种基于模糊控制理论的风挡雨刷同步控制系统.模糊控制是智能控制的一个重要分支,与常规PID控制相比具有无须建立被控对象的数学模型,对被控对象的时滞、非线性和时变性具有一定适应能力等优点,同时对噪声也具有较强的抑制能力.用 Matlab/Simulink软件进行仿真和验证可知模糊控制与PID控制比起来具有调节速度快、超调量小等特点.图4~5中对比了两种控制算法的结果,表明模糊控制系统超调小且响应平稳.
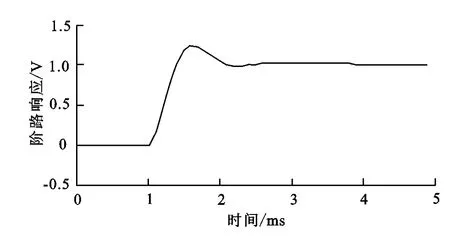
图4 PID控制系统仿真结果Fig.4 PID control system simulation results
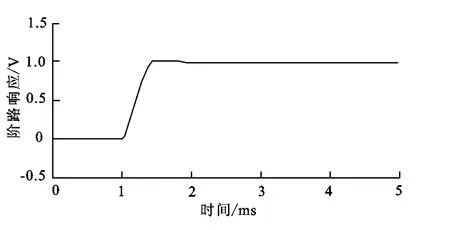
图5 模糊控制系统仿真结果 Fig.5 Fuzzy control system simulation results
硬件工作时,当开关打到低速档时,雨刷器工作频率为12循环/min.通过示波器测量可得,低速档位时直流电机编码器输出脉冲频率为2.384 66k Hz,高电平电压为2.48V;当开关打到高速档时,雨刷器工作频率为20循环/min.通过示波器测量可得,高速档位时直流电机编码器输出脉冲频率为3.990 40k Hz,高电平电压为2.40V;当开关打到间歇档时,雨刷器工作频率为10循环/min,其中每个循环内雨刷器工作3s,停止3s.通过示波器测量可得,间歇档位时高电平电压为2.40V.通过实验测试,本系统控制精准,各档位电机编码器输出脉冲幅度稳定,频率能达到预期要求,系统反应灵敏,稳定性较好.
4 结束语
风挡雨刷同步控制系统通过STM32控制,通过PWM技术实现调速.系统利用模糊控制算法实现了同步状态下两个雨刷器的精准控制,为机车驾驶员雨天驾驶提供了安全保障,具有较高的使用价值及较好的市场前景,对进一步提高汽车智能化具有重要意义.
[1] 李艳明,蒋任君,倪永亮,等.基于智能功率开关BTS6143D的车辆雨刷电机起动控制方案设计[J].车辆与动力技术,2015(1):51-54.LI Yanming,JIANG Renjun,NI Yongliang,et al.Design on vehicles wiper motor start-up control scheme based on IPS BTS6143D[J].Vehicle & Power Technology,2015(1):51-54.
[2] 张朝祥,许伟明.基于模糊控制理论的智能雨刷控制器[J].计算机测量与控制,2011,19(2):309-311.ZHANG Chaoxiang,XU Weiming.An intelligent wiper controller based on fuzzy control theory[J].Computer Measurement & Control,2011,19(2):309-311.
[3] 张奎,雷勇.无刷直流电机智能PID控制系统建模与仿真[J].测控技术,2015,34(4):81-84.ZHANG Kui,LEI Yong.Modeling and simulation of brushless DC motor intelligent PID control system[J].Measurement & Control Technology,2015,34(4):81-84.
[4] 孙立军,孙雷,张春喜.无刷直流电机和PWM 调制方式研究[J].哈尔滨理工大学学报,2006,11(2):20-123.SUN Lijun,SUN Lei,ZHANG Chunxi.Study on PWM modulation mode of brushless DC motor[J].Journal of Harbin University of Science and Technology,2006,11(2):20-123.
[5] 贺理,龙永红,滕峻林,等.基于PWM 的机车雨刮控制器的设计[J].湖南工业大学学报,2010,4(6):4-88.HE Li,LONG Yonghong,TENG Junlin,et al.Design of Locomotive Wiper controller based on PWM [J].Journal of Hunan University of Technology,2010,4(6):4-88.
[6] 廉小亲.模糊控制技术[M].北京:中国电力出版社,2003:32-52.LIAN Xiaoqin.Fuzzy control technology[M].Beijing:China Electric Power Press,2003:32-52.
[7] 黄卫华.模糊控制系统及应用[M].北京:电子工业出版社,2012:94-97.HUANG Weihua.Fuzzy control systems and applications[M].Beijing:Publishing House of Electronics Industry,2012:94-97.
[8] TANAKA K,HORI T,WANG H O.A multiple lyapunov function approach to stabilization of fuzzy control systems[J].Fuzzy Systems,IEEE Transactions on,2003,11(4):582-589.
[9] Precup R E,Hellendoorn H.A survey on industrial applications of fuzzy control[J].Computers in Industry,2011,62(3):213-226.
[10] 李朝青.单片机原理及接口技术[M].北京:北京航空航天大学出版社,2005:89-108.LI Chaoqing.SCM principles and interface technology[M].Beijing:Beihang University Press,2005:89-108.
