多目标自由聚焦系统
2015-05-20吴长安李焕梅
吴长安+李焕梅
摘要: 为使聚焦系统能高效、及时、准确地定位聚焦目标,提出了一种多目标自由聚焦算法。通过动态划分窗口提取单目标,利用同步检测法防止视场切换后窗口内无目标,采取对比分析法抑制噪声,建立了快速聚焦评价函数数学模型。通过实验对比分析了本聚焦评价函数相对于现有算法的优点,研究了自适应变步长全局搜索策略。系统以TMS320DM642硬件为基础,并通过VC软件编程实现。经过大量户内外实验分析,证明了该系统的可行性、正确性和有效性,并且已成功应用到边防监控转台产品中。
关键词: 多目标; 自由聚焦; 同步检测; 自适应
中图分类号: TP 391文献标志码: Adoi: 10.3969/j.issn.10055630.2015.02.012
Multiobject freefocusing system
WU Changan, LI Huanmei
(Hebei Hanguang Industry Co., Ltd., Handan 056028, China)
Abstract: The efficient timely and accurate orientation of focusing aim is the key of a focusing system. A new evaluation method called multiobject freefocusing algorithm was proposed. User may select any single object by changing windows. Synchronized detection method was used to solve the problem of no object in the window after scene changing. The comparative and analytical method for restraining noise was discussed. The quickly focusing mathematical model was established. The technique is better than all the other methods by experimental comparison. Selfadaptalterstep wholerangesearch strategy was studied. The system was set up successfully in the TMS320DM642 hardware and VC software platform. The abundant outdoor and indoor experimental results indicated the feasibility, the veracity and the validity of the system, and it has been applied to frontier defence products.
Keywords: multiobject; freefocusing; synchronized detection; selfadapt
引言自动聚焦是目前光学成像系统的一项不可或缺的重要技术,应用产品越来越广泛,例如数码相机、光学镜头、显微镜、扫描仪、数字视频平台等精密仪器,几乎涉及到所有领域,而准确、快速聚焦又是自动聚焦技术的关键。目前关于聚焦评价方法主要有时域和频域两种。由于时域函数相对于频域函数具有计算量小、简洁、快速等特点,使其应用广泛[18],本系统所用的聚焦评价函数是时域模型。聚焦区域划分目前基本是针对一幅图像进行定性划分[711],具有一定的局限性。而聚焦区域的选择直接影响到聚焦算法的速度和精度,好的局部窗口聚焦函数一方面大大减少数据处理量,加快聚焦速度,另一方面消除了非感兴趣区域的噪声干扰,提高聚焦精度。本聚焦系统的聚焦窗口选择灵活,可实时更换兴趣目标并对此自动聚焦。本系统所采取的算法称作多目标自由聚焦算法,应用环境是路防红外热像仪。1系统评价函数自由聚焦是指当外界有鼠标时,可用鼠标人工干预具体的聚焦位置,在图像界面上自由选择视场内的任何单目标进行自动聚焦。可以实时选取任意感兴趣的目标中心区域,从多目标中灵活提取单目标进行实时聚焦,目标可以随时改变,不受算法和数学模型的影响,具有很强的人机交互性。多目标自由聚焦算法包括三部分:确定窗口,评价函数选取,搜索策略。在采取评价函数及搜索策略的同时,要确定采取的是局部窗口还是全局窗口,一般情况选取局部窗口进行实时聚焦,但为避免图像选择区域在视场切换后无搜索目标的异常情况,假设一幅图片大小为720 pixel×576 pixel,采取同步检测法光学仪器第37卷
第2期吴长安,等:多目标自由聚焦系统
Epart=∫ymaxymin∫xmaxxminT(m,n)
Eall=∫5761∫7201T(m,n) (1)式中:Epart和Eall分别指某一幅图像局部窗口和全局窗口具有的边缘能量;(xmin,ymin)和(xmax,ymax)分别是局部窗口选取图像区域的左上角坐标点和右下角坐标点;T(m,n)是图像某像素(m×n)所具有的边缘能量。Dpart=max(Epart)
Dall=max(Eall) (2)式中Dpart和Dall分别是电机走一圈的所有视频帧的局部窗口和全局窗口边缘能量峰值。D=DpartifDpart>Dthreshold
D=Dallelse (3)式中:Dthreshold是一个很小的峰值阈值;D作为边缘能量峰值的输出值,是搜索策略判断的依据,对应的视频帧图像即搜索匹配图像。一般基于空域的评价函数由梯度算子决定,由于Sobel梯度算子对于局部窗口区域聚焦效果好,但算子只有水平方向和垂直方向的梯度,对于规则目标较适用,对于不规则对象就会导致丢失边缘点从而误判。所以,多目标自由聚焦算法为了全面考虑各个方向的目标梯度值,模板基于Sobel算子,同时添加了斜向算子,一个像素清晰度值由其周围的8个像素对应的4个算子绝对值和来计算,这4个算子分别是:检测水平边缘能量的算子,检测垂直边缘能量的算子,检测正斜45°方向边缘能量的算子,检测反斜45°方向边缘能量的算子。多目标自由聚焦算法评价函数为Tx=f(x+1,y-1)+2f(x+1,y)+f(x+1,y+1)-f(x-1,y-1)-2f(x-1,y)-f(x-1,y+1)
Ty=f(x-1,y+1)+2f(x,y+1)+f(x+1,y+1)-f(x-1,y-1)-2f(x,y-1)-f(x+1,y-1)
Tz=2f(x+1,y+1)+f(x+1,y)+f(x,y+1)-2f(x-1,y-1)-f(x-1,y)-f(x,y-1)
Tw=2f(x-1,y+1)+f(x-1,y)+f(x,y+1)-2f(x+1,y-1)-f(x,y-1)-f(x+1,y)
T(m,n)=Tx+Ty+Tz+Tw
MT=max(Tm,n)
FT=max(MT) (4)式中:FT是在视频所有帧中求边缘能量峰值的最大值极值;MT是一帧图像所有像素边缘能量峰值;Tx,Ty,Tz,Tw分别是4个方向的边缘算子。考虑到时域函数抑制噪声能力弱的特点,本评价函数采取如下对比分析法:在求边缘峰值的同时记录下峰值对应的像素及附近8个像素的边缘能量值,根据图像边缘分割原理,边缘处不可能只存在单个像素点,邻域8个像素至少有2个像素也为边缘像素,设定一个阈值,求出能量值与峰值差的绝对值在阈值内的像素个数n,若n<2,则将此峰值对应的像素舍弃。此对比分析法有效去除了非边缘区单个噪音点,达到了去噪的效果,以利于更准确判断极值对应的视频帧是要搜索的焦距位置。2系统搜索策略聚焦搜索策略经典算法主要是遍历搜索算法及爬山搜索算法,目前研究的大多数搜索策略都是基于爬山思想且在其基础上有所改进[68,12]。但爬山思想存在的缺点是只有找到下降点才能确定最大峰值点,算法本身不可能做到单侧逼近收敛,时常也会出现虚晃现象,导致电机无法停止,并不能兼顾聚焦速度及精度要求。为避免上述情况,本文采取自适应变步长全局搜索策略,根据系统评价函数所得出的极值焦距位置,驱动电机使镜头定位到该处。这种方法实现简单,有效克服了回程定位误差。在此,电机速度必须控制好,既不能太快也不能太慢,因图像处理主芯片DM642图像采集速度为50帧/s,太快容易丢失有用帧,导致定位错误,太慢虽然能精确对焦但速度指标达不到,所以要根据实际经验确定电机速度,将模糊控制应用于自动聚焦的峰值搜索过程中。因镜头有长焦区域、短焦区域和无效区域,长焦区域(即小视场)和短焦区域(即大视场)分别有聚焦清晰位置,但长焦区域范围窄,峰值只在长焦端附近,所以接近长焦端电机速度一定要慢,而无效区内图像处于离焦模糊状态,所以在无效区域电机大步长全速前进。在长焦区域和短焦区域可根据当前视频帧图像峰值Dnow和评价函数输出极值D差的绝对值Dnow-D选择变步长搜索,设当前步长为lnow,则表示为Dnow-Dlnow=p,其中p为一固定常量。3系统组成
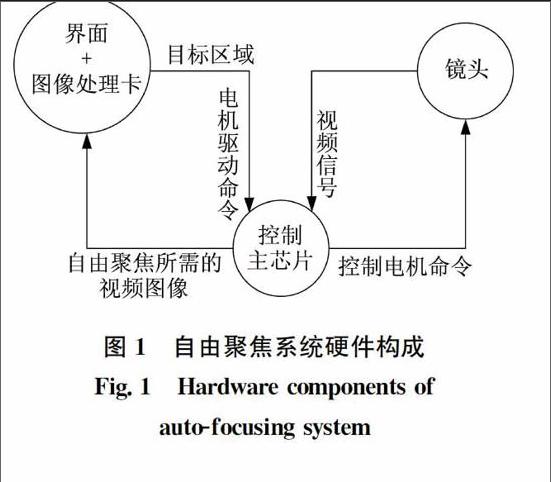
3.1硬件组成多目标自由聚焦系统主要是由镜头部分、控制单元、模仿按键模块的界面及图像采集卡组成,如图1所示。镜头部分主要包括镜头、供电模块、图1自由聚焦系统硬件构成
Fig.1Hardware components of
autofocusing system步进电机、机芯。控制单元主控芯片是TMS320DM642。图2自由聚焦系统模块划分
Fig.2Modules of autofocusing system镜头机芯供电电源为12 V,步进电机可在整个视场区(包括长焦区域、短焦区域及无效区)内转动,串口通讯采用标准485接口。控制主芯片接收界面按长焦切换、短焦切换和自由聚焦串口协议进行相应响应,程序一部分用于图像处理算法,一部分用于控制电机的停转及转速,其中长焦切换和短焦切换是跨越无效区域的只对图像中心区域运用数字图像处理算法实现聚焦的过程,自由聚焦是指在长焦区域或短焦区域针对局部窗口及全局窗口运用数字图像处理算法实现聚焦的过程。
3.2软件平台软件编程是基于CCS(code coposer studio)2和VC6.0软件平台的,其中CCS2是针对TMS320DM642编程使用的,VC6.0是为界面服务的,界面上实时显示视频流。
系统按照模块化设计原则,采用自顶向下逐步细化方法进行软件开发,划分的各模块如图2所示,大致分为视频采集模块、自由聚焦模块、聚焦搜索模块、电机驱动模块,采用的编程语言为最基本且高效率的C语言和VC++语言。4实验分析为了验证多目标自由聚焦系统的可行性及系统算法的性能,充分考虑到聚焦速度、聚焦精确度的评价原则,在上述软硬件平台上分别对长短焦视场切换、长焦内自由聚焦、短焦内自由聚焦做了大量的户内外实景实验,并用红外平行光管模拟无穷远目标进行实验。系统多目标自由聚焦算法的性能分析:(1)无偏性:搜索策略搜索到的聚焦结果视频帧与评价函数极值对应的帧一致。(2)单峰性:评价函数与搜索策略有且只有一个极值。(3)灵敏性:按照用户所需聚焦窗口可在界面上任意改变,评价函数与搜索策略内的阈值可以改变。(4)通用性:图3、图4、图5是针对不同场景的实验结果图,大量实验证明了本算法的通用性。
图3实验中抽取的几个场景
Fig.3Some scenes of the experiments
图4不同视场聚焦结果图
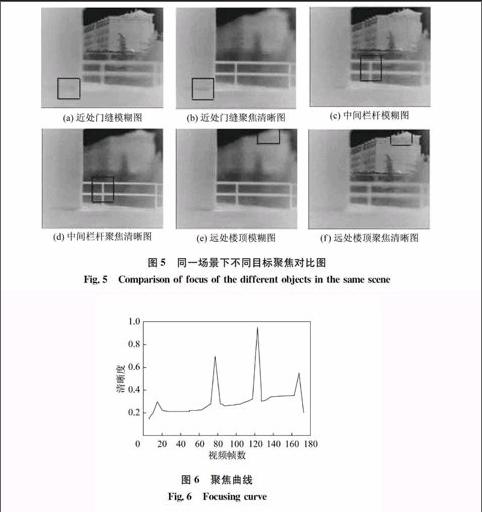
Fig.4Focus results of the different scenes图4是10 km以外场景的长短焦区域分别聚焦结果图,证明了视场切换前后采用同步检测法的可行性,图4(a)是长焦区域窗口内有目标则按窗口聚焦,图4(b)是短焦区域窗口内无目标则进行全局聚焦。图5是进行户外实验过程中抓取的长焦区域内聚焦情况,是同一场景下3个不同方位处的目标分别处于模糊和清晰状态时的对比图,由图5(b)(d)(f)可明显看出,场景复杂情况下动态划分窗口并进行局部聚焦的必要性,体现了本算法的优越性。图6是针对上述整幅图像截取大致170帧的归一化清晰度变化曲线。由图6看出,大致有4个尖峰点,视频帧15 、80和165附近代表不同目标最清晰位置,恰好分别对应图5的(b)、(d)及(f)。若是对整幅图像聚焦则会聚焦在120帧附近,从而造成误判。
图5同一场景下不同目标聚焦对比图
Fig.5Comparison of focus of the different objects in the same scene
图6聚焦曲线
Fig.6Focusing curve
5结论本文从聚焦算法、搜索策略、系统的软硬件实现及实验四个方面全面阐述了路防多目标自由聚焦系统的实现过程,有效地满足了自由聚焦精度和速度两个最重要指标。相对于以往研究工作,本系统所做的环境实验较多,具有实际应用价值,今后所要开展的工作是将系统进行海上环境实验。该自由聚焦系统有着广泛的应用前景,例如可以应用于陆地边防、海上边防、安全缉私等系统,可满足夜视、侦察、报警、跟踪等方面的要求。参考文献:
[1]姚珺,张俊举,常本康.一种基于灰度分割的自动调焦算法[J].计算机应用研究,2012,29(8):31483150,3172.
[2]张亚涛,吉书鹏,王强锋,等.基于区域对比度的图像清晰度评价算法[J].应用光学,2012,33(2):293299.
[3]周丽平,孙志峻,张泉.显微视觉系统的自动聚焦及控制[J].光学 精密工程,2013,21(3):807812.
[4]汪宋良.一种改进型灰度差分聚焦算法研究与实现[J].光学仪器,2013,35(4):4752.
[5]张来线,孙华燕,郭惠超,等.基于图像灰度梯度最大值累加的自动调焦算法[J].光子学报,2013,42(5):605610.
[6]罗李焱,徐德,张正涛,等.显微视觉系统对柱状微零件自动聚焦技术研究[J].计算机工程与应用,2014,50(8):122126.
[7]高洁,何小刚,梁波,等.基于Hi3515的自动聚焦系统[J].电视技术,2013,37(3):7377.
[8]圣钱生,张桂英,吴有俊,等.基于DaVinci的自动对焦算法研究及实现[J].通信技术,2012,45(1):5658,62.
[9]胡凤萍,常义林,马彦卓,等.视频自动聚焦的实现研究[J].光子学报,2010,39(10):19011906.
[10]于保军,杨志刚,田丰君,等.宏/微双驱动定位台显微视觉自动聚焦清晰度评价方法[J].农业机械学报,2010,41(6):199203.
[11]李成,李旭宇.基于窗口模式的自动聚焦算法[J].光学仪器,2009,31(2):5256.
[12]陈东,杨建中,王金.基于模糊推理的聚焦曲线峰值搜索算法研究[J].电视技术,2014,38(7):3336.
(编辑:张磊)
