无线双轴倾角传感器的设计
2015-05-17徐晓辉闫明明
王 超, 徐晓辉, 郭 涛, 闫明明
(1.中北大学电子测试技术国家重点实验室;仪器科学与动态测试教育部重点实验室,山西太原 030051;
2.洛阳理工学院工程训练中心,河南洛阳 471023)
0 引言
随着MEMS技术的飞速发展,体积小、精度高、价格低的优点使得MEMS倾角传感器成为倾角测量仪器的首选[1]。尤其在国防军事上车载雷达、导弹发射车的调平领域。发射导弹前,升起车载雷达进行扫描,发现目标后锁定,然后攻击,雷达工作时用液压支腿将车顶起,调整为水平,并在规定的范围内保持一定的精度。雷达工作时天线及波束扫描要有一个起始位置,调平就是使此位置固定,从而使测量精度真实可靠。调平导弹发射车的主要目的是赋予导弹一定精度的初始角度,使导弹发射后能快速、准确地射入制导雷达波束而截获,从而使导弹尽快受控,防止发射截获失败等事故[2]。本文设计的无线倾角传感器在许多人工很难达到的测量现场都可以进行测量,同时无线倾角传感器可被用于复杂恶劣的工作环境进行信号采集,有很强的应用价值,应用前景十分广阔[3]。
1 角度测量原理
角度传感器是基于重力加速度原理而设计的,由于重力加速度g方向竖直向下,当空间平面水平与g垂直,g在平面上的投影则为0;如果空间平面不水平,即与g不垂直时,g在该空间平面上的投影不为0。
如图1所示,通过加速度传感器感应轴上的重力加速度,经过转换可得到平面倾角。传感器输出与重力之间存在下列关系:
式中:AX为加速度传感器输出;g是以重力作为参考的加速的值;α代表传感器倾角。传感器测试到加速度,输出带有加速度信息的电压信号,即可以表征角度。
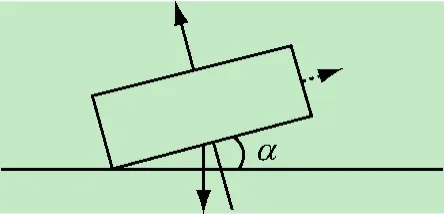
图1 测量原理图
在加速度原理的基础上实现角度测量,它以重力为输入矢量来决定物体在空间的姿态,这里即指物体的角度反应[4]。把加速度传感器固定在物体的水平面上,当物体角度改变时,加速度传感器的敏感轴随之转动一定角度,由于重力的作用,传感器敏感轴上的加速度会发生改变,因此可以通过测量加速度的变化来反映物体的角度偏转。
2 方案设计
双轴加速度传感器ADXL202可用来测量二维加速度信号,同时也可测量倾角信号。将采集到的信号传输进单片机进行分析、处理和数据计算,得到的倾角数据经由无线发射电路发送出去,无线接收模块检测的同频率的信号并接收数据[5]。
如图2所示,无线双轴倾角传感器主要包括传感器模块、单片机、显示模块、无线模块4部分。
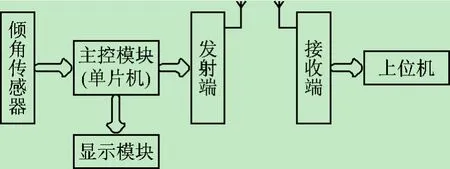
图2 系统设计框图
(1)传感器模块。设计MEMS传感器的外围电路,使传感器能输出数字信号。本系统采用ANALOG DEVICES公司的ADXL202芯片。
(2)单片机。系统的控制中心,完成数据处理、输出显示数据。本系统采用了STC公司的STC89C52单片机作为控制核心。
(3)显示模块。该模块作用是使用LCD将输出的X轴和Y轴的倾角显示出来。
(4)无线模块。无线收发电路是将单片机处理后的数据发送并接收,本系统采用了TI公司的CC1110芯片作为无线模块核心。
2.1 传感器模块
本设计选用ADXL202作为倾角测量的传感器芯片[6]。Xfilt与Yfilt为传感器的模拟输出端;Xout与Yout为数字输出端,ADXL202可输出数字信号并直接传输给微处理器,而无需A/D转换或附加其他电路。
本设计中把传感器输出数字信号的两个引脚Xout、Yout直接接到单片机的两个I/O引脚上,通过检测引脚上高低电平的持续时间来计算其占空比,再进一步计算其加速度值,进而可以转换得到倾角值。传感器部分的外围电路如图3所示。
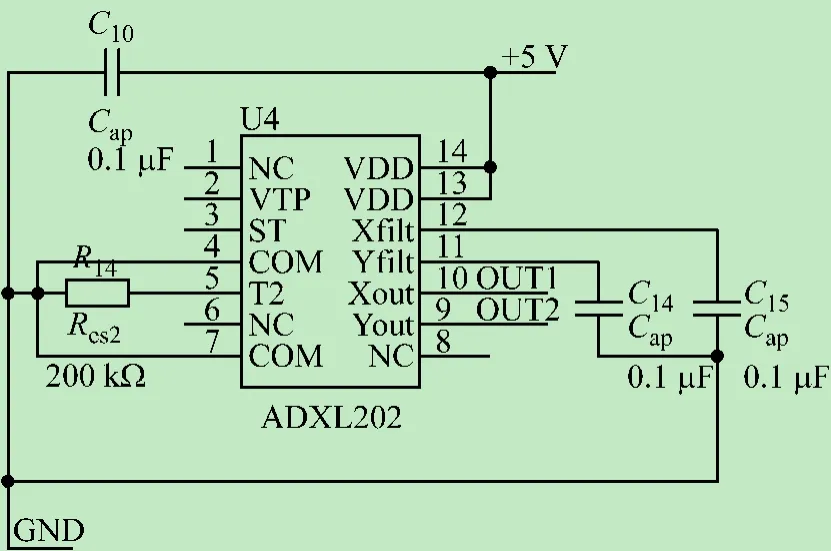
图3 传感器外围电路
2.2 控制模块
选用STC89C52单片机作为设计电路的控制部分,传感器测得倾角信号输入到单片机,在单片机中进行计算和转换,最后得到测量的倾角值。单片机系统电路如图4所示。
2.2.1 复位电路
单片机的复位电路有上电复位和手动按钮复位两种形式,RESET端的高电平直接由上电瞬间产生高电平则为上电复位;若通过按钮产生高电平复位信号则称为手动按钮复位。单片机的复位电路非常重要,如果复位端RESET电平不稳定将直接导致单片机的工作异常[7]。因此,复位电路既要保证电平稳定又要满足单片机复位信号的延时要求。
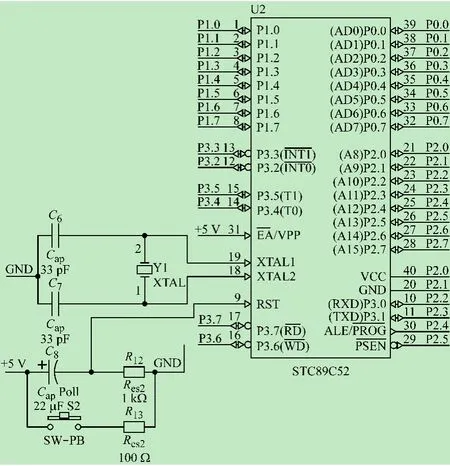
图4 单片机系统电路图
2.2.2 程序下载电路
选用MAX232作为USB转串口芯片,MAX232芯片是美信公司专门为电脑的RS-232标准串口设计的接口电路,使用+5V单电源供电。内部结构基本可分3部分:
(1)电荷泵电路。由1~6脚和4只电容构成。功能是产生+12 V和-12 V两个电源,提供给RS-232串口电平的需要。
(2)数据转换通道。由7~14脚构成两个数据通道。其中 13脚(R1IN)、12脚(R1OUT)、11脚(T1IN)、14脚(T1OUT)为第一数据通道;8脚(R2IN)、9脚(R2OUT)、10 脚(T2IN)、7 脚(T2OUT)为第二数据通道。TTL/CMOS数据从T1IN、T2IN输入转换成RS-232数据从T1OUT、T2OUT送到电脑DP9插头;DP9插头的RS-232数据从R1IN、R2IN输入转换成TTL/CMOS数据后从R1OUT、R2OUT输出。
(3)供电。15脚GND、16脚VCC(+5 V)。设计电路如图5所示。
2.3 显示模块
将经单片机转换得到的倾角值在显示模块上显示,显示模块选用LCD1602作为显示芯片,LCD1602功耗低、体积小、显示内容丰富、超薄轻巧,常用在袖珍式仪表和低功耗应用系统中[8]。使用单片机对LCD进行控制显示,单片机的P1口作为数据端,P2口作为控制端。显示模块的电路如图6所示。
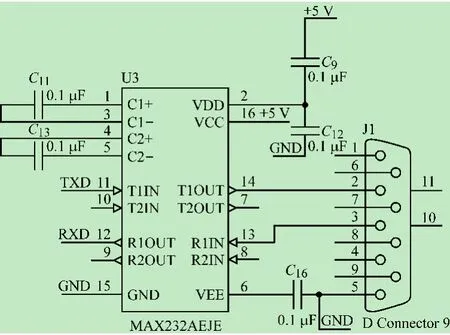
图5 程序下载电路图
2.4 无线收发模块
无线收发模块分为发送模块和接收模块两部分[9],发送模块和接收模块电路大致相同,RF无线模块由无线单片机CC1110和RF天线电路组成。
2.4.1 无线单片机CC1110
CC1110是一种低成本真正的无线SOC,为低功耗无线应用而设计[10]。该芯片包含了一个标准的增强型8051MCU和一个无线收发芯片CC1100,被封装在一个6 mm×6 mm的芯片中。8051MCU自带32 KB Flash和4 KB RAM。
无线通信主要工作在315、433、868和915 MHz的ISM(工业,科学和医学)和SRD(短距离设备)频率波段,在ISM频段可自由地设置为300~348 MHz、391~464 MHz和 728 ~928 MHz[11]。
CC1110的RF射频收发器集成了一个高度可配置的调制解调器。这个调制解调器支持不同的调制格式,其数据传输率可达500 kb/s[12]。通过开启集成在调制解调器上的前向误差校正选项,使性能得到提升。
CC1110结合一个高性能433 MHz、868/915 MHz DSSS(直接序列扩频)射频收发器核心和一颗工业级小巧高效的8051控制器[13]。该芯片延用了以往TI公司ZigBee无线(定位)芯片CC2430/CC2431架构,它使用1个8位MCU(8051),具有32 KB可编程闪存和4 KB的RAM,还包含模拟数字转换器(ADC)、定时器(Timer)、AES128协同处理器、看门狗定时器(Watchdog Timer)、32 kHz晶振的休眠模式定时器、上电复位电路、掉电检测电路以及21个可编程I/O引脚[14]。
CC1110芯片工作时的电流损耗为16 mA;速率为1.2 kBaud,在接收和发射模式下,电流损耗分别低于16.2 mA 或16 mA;速率为2.4 kBaud,CC1110 休眠模式和转换到主动模式的超短时间的特性,特别适合那些要求电池寿命非常长的应用[15]。
2.4.2 无线模块设计
无线模块由单片机CC1110和RF天线电路组成。CC1110的两个引脚 P1_0、P1_1外接两个发光二极管,作为无线通信的闪烁标志;RF_N、RF_P引脚外接天线做无线收发使用,23脚(RF_P)在 RX期间向LNA输入正向射频信号,在TX期间接受来自PA的输入正向射频信号;24脚(RF_N)在RX期间向LNA输入负向射频信号,在TX期间接受来自PA的输入负向射频信号;X1、X2提供系统工作单片机需要的晶振,其中 X2是32.768 kHz的 XOSC,X1是32MHz的晶振;DVDD外接2.0~3.6 V电源供电,其中2脚为I/O供电,19脚、22脚、25脚、26脚、29脚为模拟电路的连接供电;27引脚(RBIAS)接电阻为参考电流提供精确的偏置电阻;31脚是复位引脚,连接一个复位电路,设计电路如图7所示。
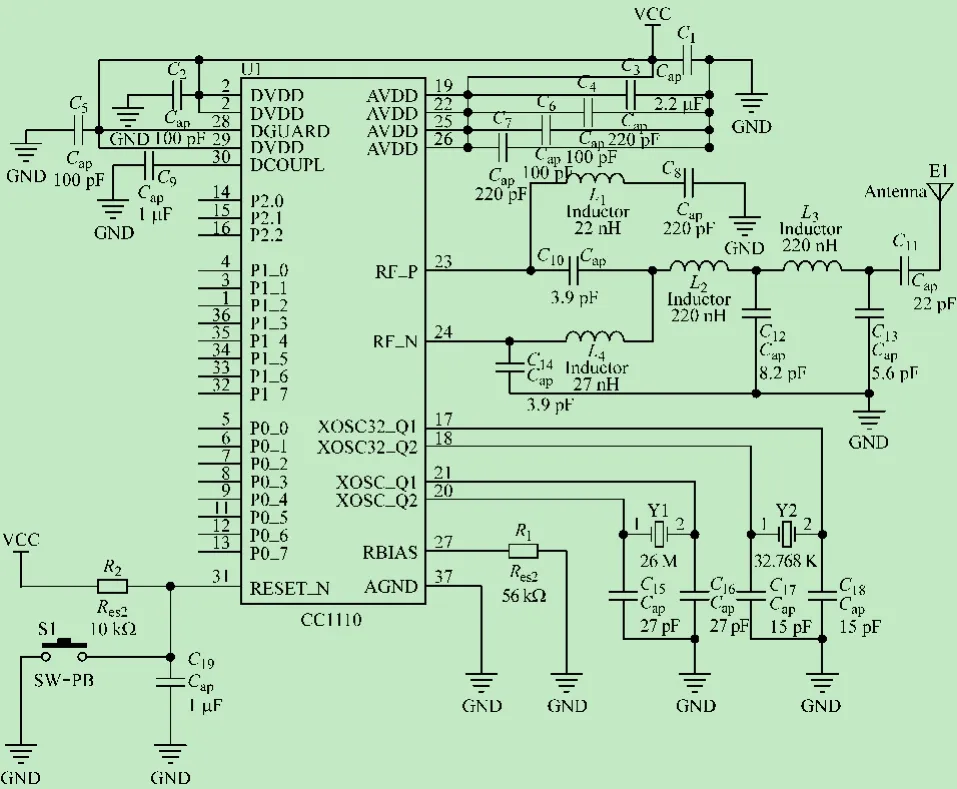
图7 无线模块电路图
3 系统程序设计
3.1 单片机控制模块程序设计
利用单片机对传感器传输的信号进行处理和计算,程序流程如图8所示。
3.2 无线模块程序设计
主要内容包括CC1110芯片的初始化、数据发送和接收。
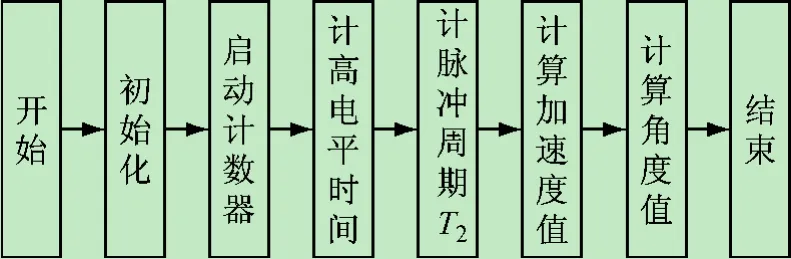
图8 单片机程序流程图
3.2.1 RF 配置函数
配置函数规定了无线收发模块的收发频率、发送功率、无线传输速率、无线收发模式、调制方式以及数据长度等[16]。CC1110 可以工作于 315、433、868/915 MHz。
本设计中,CC1110工作于433 MHz,传输速率为250 kHz,GFSK调制方式,540 kHz接收滤波带宽。
3.2.2 RF 发送程序
发送模块主程序首先初始化8051MCU和无线射频部分CC1110模块。点亮LED,表示系统进入等待状态。发送模块进入程序循环,把数据发送出去,LED闪烁一次。发送流程如图9所示。

图9 RF发送流程
3.2.3 RF 接收程序
接收模块主程序首先初始化8051MCU和射频部分CC1110模块,然后点亮LED,系统进入等待状态,监视空气中的无线信号,判断是否有发送来的数据包,如果有,LED状态取反。接收流程如图10所示。
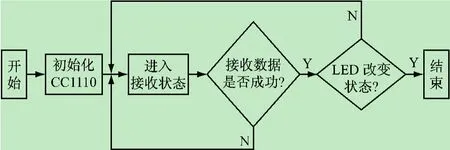
图10 RF接收流程
无线收发模块主要实现的功能是:发送模块上电复位以后,进入无线通信状态,点亮红灯,进入无线发送状态,发送模块开始发送一个数据包,红灯闪烁一次。接收模块上电复位以后进入无线通信状态,点亮红灯,进入无线接收状态,接收到数据红灯闪烁一次。
4 实验验证
利用三轴位置转台对设计的无线倾角传感器进行标定试验,转台精度为0.01°。试验结果如表1所示。从表中可以看出,最大角度误差为±0.03°,测量精度较高,满足大多数领域对角度测量精度的要求。

表1 试验标定结果
5 结语
介绍了MEMS倾角传感器与无线传感器网络结合设计的无线双轴倾角传感器,本设计具有微型化、低价格、高精度等特点。本设计采用倾角传感器的数字输出信号进行处理,避免了模拟信号处理过程中可能出现的噪声、干扰等不利因素。试验结果表明,本设计可以应用在频率变化较为缓慢、加速度不太大的角度测量领域。
[1]田小芳,陆起涌,熊 超.基于加速度传感器的倾角仪设计[J].传感技术学报,2006(4):361-363.
[2]蔡 型,张思全.短距离无线通信技术综述[J].现代电子技术,2004(3):35-37.
[3]徐泰然.MEMS和微系统——设计与制造[M].北京:机械工业出版社,2004:1-29.
[4]韩 宏,吴嘉澍.基于加速度计的数字式倾角仪的设计[J].传感器技术,2005,24(4):48-50.
[5]杨凤年,何文德,刘光灿.基于单片机的角度测量仪的设计[J].光电技术应用,2005,4(2):60-63.
[6]Ruffin P B,Burgett S J.Recent progress in MEMS technology development for military applications[J].Smart Structures and Materials,2001,4334:1-12.
[7]李文仲,段朝玉,等.CC1110/CC2510无线单片机和无线自组织网络入门与实战[M].北京:北京航空航天大学出版社,2008:165-182.
[8]翟 雷,刘盛德,胡咸斌.ZigBee技术与应用[M].北京:北京航空航天大学出版社,2007.
[9]刘爱华,满元宝.传感器原理及应用[M].北京:人民邮电出版社,2006:48-50.
[10]白渚铨,张晓明,刘 俊,等.基于加速度计的数字倾角仪误差建模与分析[J].传感技术学报,2013,26(8):1078-1082.
[11]Niculescu D,Nath B.DV based positioning in ad hoc networks[J].Journal of Telecommunication Systems,2003,22(1/4):267-280.
[12]景 博,张 稢,孙 勇.智能网络传感器与无线传感器网络[M].北京:国防工业出版社,2011:63-64.
[13]王秀敏,张 麒,李婷婷.Andriod平台下多路倾角传感器驱动的设计与实现[J].仪表技术与传感器,2013(9):18-20.
[14]张永梅,杨 冲,马 礼,等.一种低功耗的无线传感器网络节点设计方法[J].计算机工程,2012,38(3):71-73.
[15]胡纯意,李长庚,王鹏鹏,等.无线传感网络温湿度采集系统的设计与实现[J].计算机测量与控制,2010,18(5):1199-1205.
[16]闫明明,郭 涛,鲍爱达.基于ARM的无线温度传感器网络设计[J].实验室研究与探索,2014,33(3):105-109.
