高速相机声学触发装置设计
2015-05-15张荣文
张荣文
91550部队93分队,辽宁大连 116023
高速相机声学触发装置设计
张荣文
91550部队93分队,辽宁大连 116023
针对无人值守高速摄像的实际需求,设计了一种用于高速相机的声学触发装置。该装置利用声压传感器获取待观测目标发出的声波信号,通过单片机对输入信号进行实时分析。当单片机判定有目标出现时,会向高速相机的相应控制端口发送特定的触发信号,从而启动相机开始拍摄。触发装置由声压传感器、信号调理电路、单片机、脉冲输出电路和电源电路组成,具有体积小、功耗低、稳定性好的特点。
高速摄像;触发装置;声波信号;单片机
在一些特殊的应用中,利用高速相机对高速运动目标进行拍摄时,面临着诸多难题,如:高速目标进入高速相机视场范围的时间不确定;高速相机记录时间有限;拍摄地点必须无人职守,且相机需自动触发[1-2]。目前,高速相机的触发方式主要有人工触发、雷达触发和红外触发等[3-4]。高速目标速度较快,在高速相机视场内停留时间较短,因此人工触发可靠性很低;雷达触发可靠性好,但造价太高;红外触发又很容易受外界环境干扰,造成误触发。为此,根据高速运动物体的声学特征,本文设计了一种通过分析声信号实现高速相机拍摄触发的装置。
1 触发可行性分析
本文所采用的高速摄像机工作在中触发触模式,并循环记录拍摄内容,最长记录周期为13 s。声学触发装置一旦侦测到要拍摄的目标,就向摄像机发送触发脉冲,保证拍摄内容由触发前6.5 s和触发后6.5 s组成,完整记录目标经过的全过程。
实际使用时高速运动目标速度马赫不小于1,由于目标先于声速到达,使用前触发模式会导致先于声速到达视场的目标图像丢失。假设运动目标速度为500 m/s,摄像机最佳视场为100 m,则物体穿过视场时间为200 ms。设计采用的处理器为AT-mega16单片机[5-6],其外接16 MHz的晶体振荡器时,每秒至少可以执行8 000 000条指令。由于每完成一次声压数据的采集、计算和判决需要执行的指令不大于100条,因此1 ms内ATmega16单片机能够完成40次以上是否发出触发信号的判决,完全满足高速摄像机对触发速度的要求。
通过以上分析可知,高速摄像机工作在中触发模式时,可完整记录高速运动目标在摄像机视场内的图像。
2 系统组成
触发装置由声压传感器、信号调理电路、单片机、脉冲输出电路和电源电路组成,如图1所示。

图1 声压触发装置原理
图1中,声压传感器将声压信号变换为电信号;信号调理电路起到阻抗匹配和放大滤波的作用;单片机负责模数转换和目标到达时刻估计;脉冲输出电路在单片机的控制下输出给高速相机电平合适的触发脉冲信号。
2.1 电源电路设计
电源模块选择LM2596系列降压型开关稳压器[7]。当输入电压在9~40 V时,LM2596固定输出5 V电压。基于声压传感器的高速相机触发装置使用12 V蓄电池供电,满足LM2596的输入电压要求。LM2596开关稳压器最大驱动电流可达3 A,具有优异的线性和负载调整能力。LM2596内含一个独立的频率振荡器和频率补偿电路,需要很少的外围元件,如图2所示。图2中的J5是电源接入插座,DJ3为IN5406,起到极性保护作用。

图2 电源电路
2.2 单片机外围电路设计
基于声压传感器的高速相机触发装置选用ATMEL公司的8位单片机ATmega16。该款单片机采用先进的RISC结构,常用指令均为单时钟周期指令,且片上集成8路10位模数转换器,具有极高的性价比。由ATmega16构成的最小系统如图3所示。

图3 ATmega16最小系统
将ATmega16单片机的PA0配置成模拟信号输入,用于采集声压传感器输出的环境噪声信号;C5、C6和L1构成模拟部分电源滤波电路;A/D变换的参考电压使用电路板供电电压VCC;R1和C4构成单片机的复位电路;时钟使用16 MHz外部晶体振荡器。将ATmega16单片机的PC0、PC1配置成输出引脚,用于输出脉冲触发高速相机进行拍摄。根据所选用高速相机的触发协议,在需要进行拍摄时,单片机控制PC0输出连续5个200 ms的高电平脉冲,PC1输出连续5个200 ms的低电平脉冲,作为高速相机的触发信号。
2.3信号调理电路
实际待测目标的声源级很高,在距声压传感器10m处,声压级不小于140 dB。声压传感器采用B&K公司产品,灵敏度级为-60 dB(V/Pa),因此采用图4所示电荷放大电路结构[8],就可以保证模数转换器的输入信号幅度在0.5~2.5 V,满足采样要求。

图4 信号调理电路
3 软件设计
程序采用C语音编写,编译后可执行代码存入ATmega16单片机内部的FLASH存储器中[9]。程序执行流程如图5所示。
装置上电后,单片机连续采集声压数据,采集频率为10 kHz。在单片机内部分配1 KB的数据空间作为声功率数据的记录区,对应的时长与目标出现时声信号宽度相当。程序每0.1 ms采集一组数据,进行一次目标是否出现的判断。判断的步骤如下:
1)计算信号功率。信号功率数据记录区存储着采样信号X的平方值P。如图6所示,单片机每采样到一个新数据X并作平方操作得到最新值,以循环寻址方式移除最老值,存入最新值。因此,只需用当前信号功率减去存储的最老值,加上最新值就可计算出更新后的信号功率S。

图5 主程序流程图
2)计算背景噪声功率。背景噪声功率N的计算方法与上述计算信号功率的方法相似,但不是每个采样点都更新最终的计算结果。如图6所示,背景噪声数据记录区存储着100 ms间隔的信号功率S。单片机每100 ms以循环寻址方式移除最老值,存入最新值。因此,也只需用当前背景噪声功率减去存储的最老值,加上最新值就可计算出更新后的背景噪声功率值。为简化运算,图6中I通常取2的整数次幂,因此J=lb I。
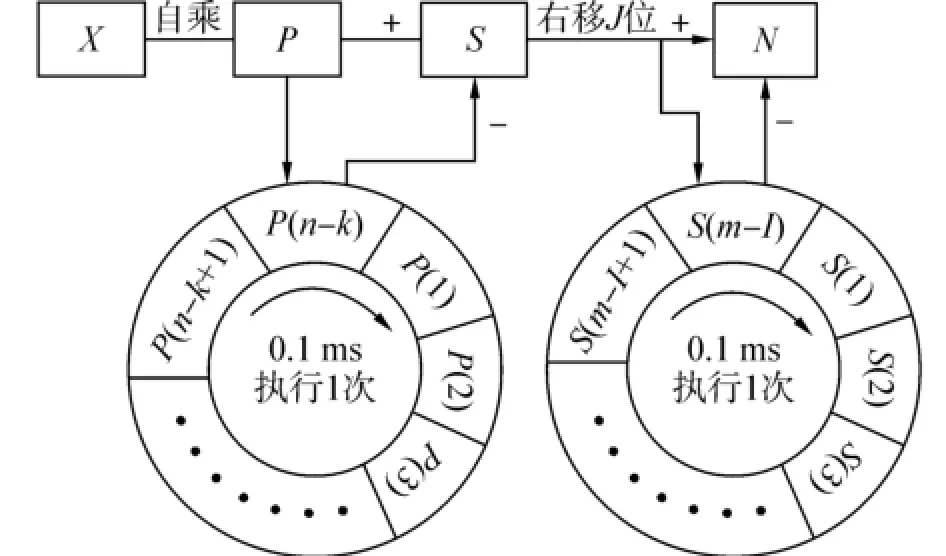
图6 计算流程
3)信号功率右移4位的结果与前一个100 ms获得的背景噪声功率比较大小。当信号功率是背景噪声功率的16倍时,认为待观测的目标出现。这里利用右移操作代替除法运算,目的是节省指令周期数。
表1给出了完成1次判断的指令周期数统计。本设计所采用的算法所需要的总指令周期数非常少,在一次数据采集间隔,即0.1 ms内,单片机完全可以执行完这些指令。

表1 完成1次判断所需时钟周期数统计
当判定目标出现时,单片机控制2个I/O接口输出控制脉冲,2路脉冲的差分结果为周期200 ms的方波信号。该方波信号持续5个周期以上就可以启动高速相机进行拍摄。
4 计算机仿真实验
为了证明算法的正确性,进行了计算机仿真。设定信号功率数据记录区存储深度为1 000,背景噪声数据记录区存储深度为32,即图6中K=1 000,I=32;背景噪声功率较目标信号功率低20 dB;信号出现在第2 s,持续时间100ms。
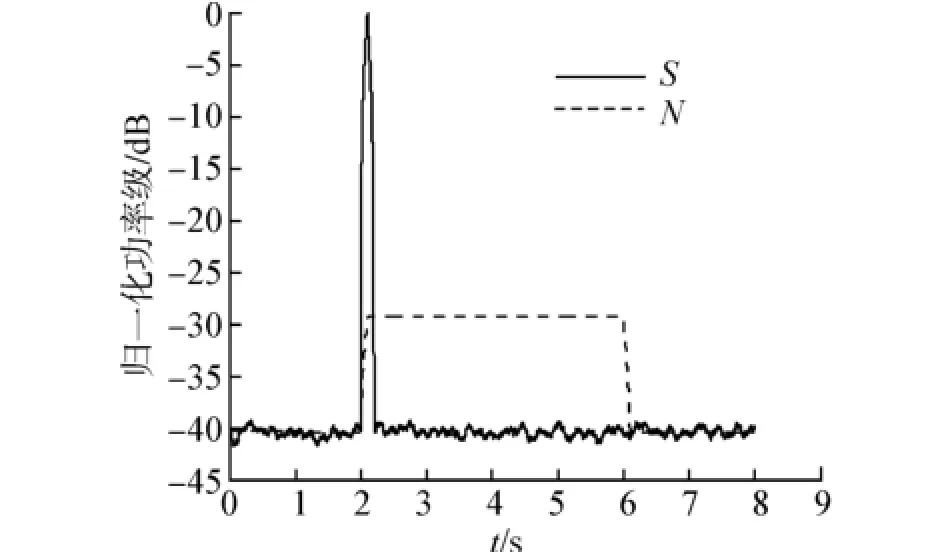
图7 S和N随时间的变化

图8 S-N与16倍功率比门限的比较
图7给出了当目标信号出现时,S和N对应归一化功率级随时间的变化情况。图8给出S-N与16倍功率比门限的比较,注意这里的N取较当前S提前100 ms的值。从图可以看出,当设此门限时,可以对目标进行正确检测。
5 结束语
在记录时间长度有限的情况下,拍摄运行时伴有声波辐射的目标,可采用声学触发装置辅助高速相机工作,以完整捕捉目标通过相机前后规定时间段内的全部影像。本文设计的声学触发装置采用了以单片机为核心处理芯片的方案,具有尺寸小、功耗低、算法运算量小、目标出现时刻判断准确度高等优点。据此方案研制的声触发装置经过2年的实际使用,参与的高速拍摄任务超过140次,没有发生误触发和漏触发现象。因此,本方案可作为类似设计的参考。
[1]李玉广,张志.基于图像的高速摄像自动触发方法研究[J].火炮发射与控制学报,2010(4):24-27.
[2]符锌砂,杨华剑.隧道监控系统中交通控制方案的自动触发[J].华南理工大学学报,2004(8):78-81.
[3]戴劲松,董永明.基于FPGA的火炮实验场多相机触发控制系统[J].兵工自动化,2014,33(3):69-71.
[4]周威祥,吴开华.轮对多通道图像采集触发技术研究[J].机电工程,2014,31(6):800-805.
[5]陈鸣慰,周杏鹏.基于ATmega16的pH参数在线测控仪设计[J].东南大学学报,2005,35(增Ⅱ):75-78.
[6]黎芳芳.基于ATmega16的数字光功率计设计[J].现代电子技术,2011,34(4):17-22.
[7]潘传勇,丁国臣,陈世夏.基于LM2596的不间断直流电源设计[J].现代电子技术,2013,36(17):107-109.
[8]孙颖奇,李保庆.低噪声压电电荷放大器的设计与实验研究[J].压电与声光,2013(6):56-60.
[9]沈文.AVR单片机C语言开发入门指导[M].北京:清华大学出版社,2003:32-34.
Design of the acoustic trigger device for a high-speed camera
ZHANG Rongwen
Unit No.93,Troop 91550,Dalian 116023,China
The design of an acoustic trigger device is proposed for a high-speed camera in this paper.The device u-ses sound pressure sensor to observe the acoustic signal from the targets and complete real-time analysis of the input signal by themicrocontroller.When themicrocontroller judges a targetappears,itwill send a specific trigger signal to the corresponding control port of high-speed camera to make the camera work.The trigger device consists of a-coustic pressure sensors,signal conditioning circuits,microcontrollers,pulse output circuit and power supply cir-cuit,with the characteristics of small size,low power consumption,and good stability.
high-speed camera;trigger device;acoustic wave signal;microcontroller
TN911.7
A
1009-671X(2015)03-026-04
10.3969/j.issn.1009-671X.201408008
2014-09-17.
日期:2015-04-22.作者简介:张荣文(1979-),男,工程师.
张荣文,E-mail:.zhang00258@tom.com.
http://www.cnki.net/kcms/detail/23.1191.U.20150422.1546.002.html
