基于LabVIEW的射频识别室内定位系统软件设计
2015-05-12赵榉云张敬帅
赵榉云,张敬帅
(广东省汕头市超声仪器研究所有限公司,广东汕头515041)
室内定位技术是指通过相关定位算法准确获取位于建筑物内目标的位置信息,随着仓储物流、抢险搜救等对室内定位需求的快速增大,室内定位技术的要求日益增高,但由于受室内环境复杂、多径效应明显、定位设备成本高昂等因素的影响,基于红外、蓝牙等技术的室内定位系统尚不能实现大范围的推广,因此寻找成本低、定位精度好的定位系统成为了一个迫切需求[1]。
LabVIEW是一种图形化的编程语言和开发环境,除系统自带多种功能函数控件用于满足基本编程外,还可通过购置的方式获得专用函数包以实现编程软件的功能拓展,Lab-VIEW图形化的编程语言简洁易懂,能够实现算法到软件的快速转变,是效率极高的“工程师语言”[2]。
本文针对射频识别(RFID)定位系统,提出了基于RSSI的Taylor级数展开定位算法,并在理论研究的基础上,以LabVIEW编程语言为平台,实现定位系统的软件部分设计。
1 基于RSSI的射频识别室内定位算法研究
1.1 射频识别(RFID)技术
RFID系统由阅读器、电子标签、应用软件系统等3部分构成,阅读器发射射频信号,电子标签接收信号后将自身编码信号发送至阅读器,应用软件系统对编码信号进行逻辑运算后,实现对电子标签信息的识别,同时向阅读器发出指令,完成信息读、写等功能操作。
1.2 RSSI定位方法
Signal Strength Indication)定位算法是根据室内环境距离-损耗模型,通过对比接收端与发射端信号衰减情况计算两者之间的距离,利用该算法进行定位测量时,需要设定已知节点作为参考位置,当设置多个节点时,可利用三边定位法实现对待测点的准确定位,其定位过程如下:设BS1,BS2,BS3为室内3个参考节点,S为待测点实际位置,S'待测点估测位置,将信号发射端置于S点,则可通过BS1,BS2,BS3三点接收到的信号强度来计算各点与S点的距离。分别以BS1,BS2,BS3为圆心,各自到S点的距离为半径画圆,从理论上讲,三个圆的交点便是待测点所在位置[3],具体如图1所示。

图1 RSSI待定位节点与已知节点之间的关系
1.3 基于RSSI的Taylor级数展开算法
在理想状态下,以参考点为圆心的各圆能够相交于一点,但受实际环境中各种因素影响,大多数情况下,各圆相交部分为一个区域,若想要在区域内准确获得待测节点的位置,则需要通过相关算法进行计算。假设基于RSSI的定位系统中N个位置已知的参考节点坐标分别为(x1,y1),(x2,y2),(x3,y3)…(xn,yn),根据各节点处信号强度及待测环境损耗模型参数,可计算出待测节点与各参考节点间距离分别为d1,d2,d3…dn,则根据两点间的距离公式可得到以下方程:
根据上式可计算出待定位节点到两个位置已知的参考节点距离差值为:

将上式在(x0,y0)处进行Taylor级数展开,且只保留了一次导数项,其展开结果为:


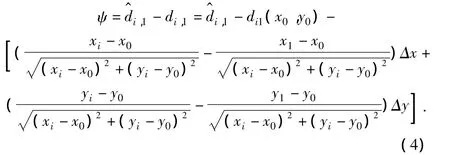
则上式的最小二乘解为:

重复递归计算,直至 Δx,Δy满足|Δx|+|Δy|<ζ,ζ为事先设定的门限,此时的(x,y)即为待定位节点的估计位置坐标[4]。
2 RSSI的射频识别室内定位软件
2.1 系统的总体设计
本系统的结构框图如图2所示。
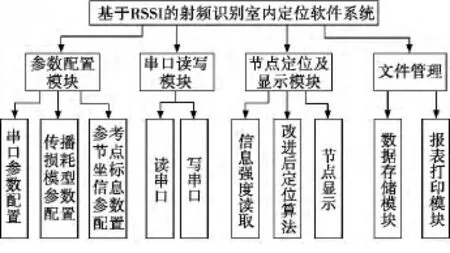
图2 软件系统结构框图
主要包括参数配置模块、串口读写模块、目标定位及显示模块、文件管理模块等4部分[5]。
2.2 系统参数配置模块设计
该模块主要实现对串口参数、传播损耗模型参数、参考节点的位置坐标进行配置,配置方式为手动输入,本文针对室内大厅环境特点,对各参数设置了默认值。
2.3 串口读写模块设计
该模块通过调用LabVIEW串口通信功能选板中的Visa存储函数完成功能设计,可通过COM1、COM2两个串口实现控制指令、测试数据的读写,实现软件系统与硬件平台的信息交换。
2.4 节点定位与现实模块设计
按照本文1.3中的Taylor级数展开算法应用到基于RSSI的射频识别室内定位系统中,并完成目标定位与现实模块设计,其流程图如图3所示。
由流程图可知,系统首先根据接收到的节点RSSI值,通过定位环境中无线信号传播损耗模型计算出参考节点到待定位节点之间的距离,最后将测量值与估计值的距离差用Taylor级数展开,并进行矩阵计算,用反复迭代的方式提高计算结果的精度,直到计算结果满足预先设置的门限条件时,最终得到待定位节点的位置坐标。

图3 系统总体程序流程图
2.5 文件管理模块设计
该模块主要包括数据读取、保存及报表打印等功能,通过调用报表生成相关控件实现,主要完成对测试数据的读取保存、测试指令的发送及测试结果的打印等操作。
3 实验结果及分析
3.1 实验方案
在理论研究及软件设计开发的基础上,构建了基于RSSI的RFID室内定位实测系统,用于验证算法定位精度及软件运行效果。
待定位环境:室内大厅
待定位范围:20 m×20 m正方形
节点情况:参考节点4个,待定位节点5个,阅读器5个,分布如图4所示。
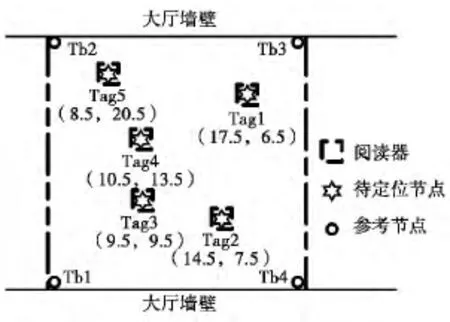
图4 节点分布示意图
3.2 结果与分析
根据以上方案在室内大厅中构建基于射频识别的定位系统,完成系统硬件协同搭建后,位于各参考节点的射频阅读器向位于待定位节点的电子标签发射问答信号,阅读器根据电子标签的应答信号判断对应节点之间的距离,利用前文提到的定位算法对图中待定位节点Tag3的位置进行估算。
对待定位区域构建二维坐标系,其中位于定位窗口四角位置的4个点分别表示四个参考节点,其坐标分别为 Tb1(2.5,2.5),Tb2(2.5,22.5),Tb3(22.5,22.5),Tb4(22.5,2.5),单位为米,具体数值可由系统界面上的参数设置模块进行手动设置;虚弧线为分别以参考节点为圆心,以参考节点与待定位节点距离为半径所画的弧线,红色圆点代表利用Taylor级数展开算法估算出的待测节点位置,方形点代表现地实测获得的待测节点的位置,从图中可以看出,单纯使用圆相交的方法只能获得定位区域,不能准确的得到待测点的位置,而使用Taylor级数展开算法能够估算出待测节点的具体位置,且误差较小。
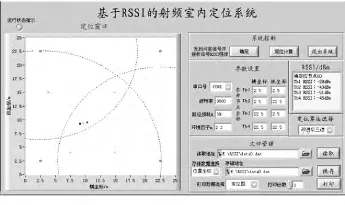
图5 基于RSSI的射频室内定位系统界面图
4 结束语
随着射频识别技术和定位理论的发展,基于射频识别技术的定位方法在室内定位领域将有很大的发展空间和应用潜力。本文在理论研究的基础上,将Taylor级数展开应用到了基于RSSI的射频识别定位系统中,并以LabVIEW语言为平台,设计开发了定位系统软件,利用室内大厅构建试验环境,对定位算法、软件系统进行了测试验证。
[1]郎为民.射频识别(RFID)技术原理与应用[M].北京:机械工业出版社,2006.
[2]倪巍,王宗欣.基于接收信号强度测量的室内定位算法[J].复旦大学学报(自然科学版),2004,43(1):72-76.
[3]方震,赵湛,郭鹏,等.基于 RSSI测距分析[J].传感技术学报,2007,20(11):2526 -2530.
[4]刘林,邓平,范平志.基于Chan氏算法和Taylor级数展开法的协同定位方法[J].电子与信息学报,2004,26(1):41-46.
[5]张敬帅,张丕状.基于虚拟仪器的多通道数据分析系统设计[J].电子技术应用,2011,4:74 -76.
