基于PVDF的三维力机器人触觉传感器的设计
2015-05-09易士琳
潘 奇,万 舟,易士琳
(昆明理工大学信息工程与自动化学院,昆明 650000)
基于PVDF的三维力机器人触觉传感器的设计
潘 奇,万 舟*,易士琳
(昆明理工大学信息工程与自动化学院,昆明 650000)
当机器手抓取时物体受力信息检测是抓取过程顺利进行的基础,检测三维方向上的力便可充分反映物体的受力信息。当前用于抓取过程中三维力检测的触觉传感器还存在着一些不足,基于此,论文拟设计一种基于PVDF的三维力机器人触觉传感器。论文展示了传感器的结构设计,建立了压电薄膜及传感头结构的数学模型,设计了调理电路并对传感器进行测试和验证,结果表明该传感器能有效检测机器手抓取过程中的三维力信息。
触觉传感器;PVDF;三维力;压电薄膜
现代工业自动化及智能化程度的不断提高促进了机器人更为广泛的应用,从而促使机器人传感器技术的研究变得十分重要。机器人传感器研究主要有集成化、感知功能复合化及迷你化等3个方向,而触觉检测就是机器人传感器感知功能的一个重要组成部分[1-3]。触觉传感器的研究始于20世纪70年代,在国外,日本佐贺大学采用柔软韧性好的压感导电橡胶研制了检测温度、硬度、热传导性的触觉传感系统[4-6]。在国内,罗志增等采用各向异性压阻材料CSA研究了一种高分辨力柔性阵列触觉传感器,但结构复杂;李铁军等采用柔性硅橡胶与导电橡胶研制了新型电流变流体柔顺触觉传感器,但成本较高[7-9]。
当前所研究的触觉传感器按照其工作原理可划分为以下几类:光传感式、压电式、电容式、磁导式、电容效应式及压阻效应式等等[10]。本文介绍的基于PVDF的三维力机器人触觉传感器,是针对现存大部分机器人触觉传感器对抓取过程中三维力信息检测的不足,结合PVDF的压电特性及相关物理参数而设计的一种能有效检测抓取过程中物体三维方向受力信息且具有一定实用及推广价值的机器人触觉传感器。与传统触觉传感器相比,本设计所测得的三维力信息能够充分反应物体在抓取过程中的受力情况。
1 传感器测量原理
PVDF为聚偏氟乙烯(Polyvinylidene Fluoride)的简称,是一种新型高分子压电材料。根据PVDF压电薄膜的特性,极化后的薄膜在承受了一定方向上的压力形变后,其极化面会产生一定量的电荷,通过相关电路引出电荷并转换成电信号,检测电信号的改变就能测得此时压电薄膜相关面所承受压力形变的具体信息了[11-13]。选取一个四棱台,在其4个侧面上分别粘贴PVDF压电薄膜。在四棱台接触面施加一个作用力F,粘贴在四棱台各侧面上的PVDF压电薄膜会受到不同的压力,也就会产生与该力成正比的电荷。因为各个薄膜所受压力不同,各自所产生的电信号强弱也就不一样,通过对电信号的测量,我们便可计算出力F在四棱台各侧面分力的大小,从而可以抽离出此时物体三维方向上的受力信息。
2 传感器结构与设计方案
基于PVDF压电薄膜的三维力机器人触觉传感器的设计核心部分是传感头,为了能有效测得接触面的三维受力信息,根据上述对三维力测量原理的分析,本文采用图1所示作为传感头结构。
由图1可知,传感头主要是由基座、四棱台以及PVDF压电薄膜这3部分组成。基座作为支撑,四棱台各面均粘贴有PVDF压电薄膜,四棱台上侧的接触面则为机器手抓取时传感器与物体的接触部位。
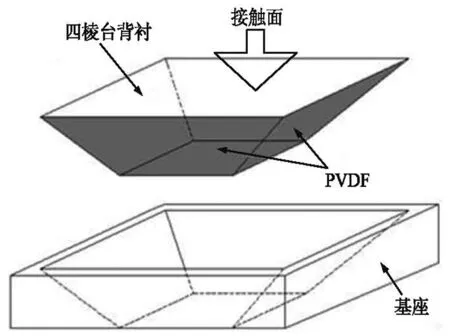
图1 传感头结构设计
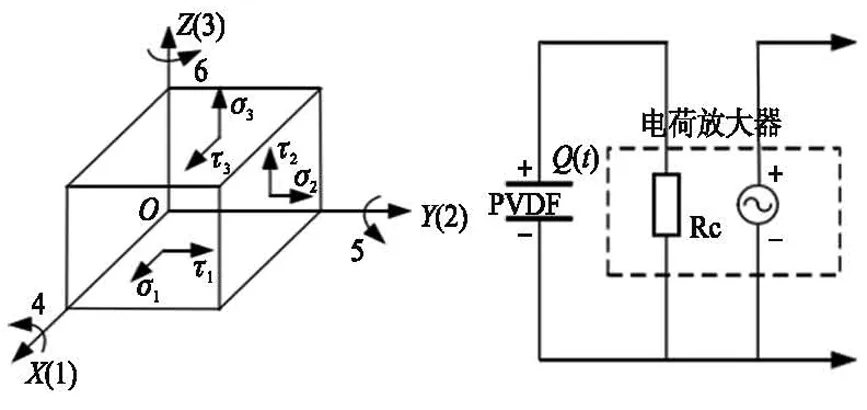
图2 PVDF受力情况及等效模型
3 传感器模型及特性分析
3.1 PVDF传感模型及特性分析
PVDF压电薄膜的某一微单元受力情况及压电元件坐标系的表示方法如图2所示。
这里我们采用数字下标来表示压电元件平面及相关受力方向,X、Y、Z3个轴向分别由1、2、3来表示,围绕X、Y、Z3个轴向的切向作用则由4、5、6来分别表示。通常来说,X轴表示拉伸方向,这是由于PVDF压电薄膜在其延伸方向具有较大的压电常数;Z轴也就是垂直于膜面的方向,表示为极化方向,也是受力方向,这是由于压电常数最大时通常处于极化方向。当传感元件为PVDF压电薄膜时,其压电方程可由式(1)表示
(1)
式中:δi是电荷密度,dij是压电系数,δj是应力,i=1~3,j=1~6。
当PVDF压电元件的3个轴向同时承受作用力,同时对YZ,XY,XZ各平面均施加切向应力,此时我们可以用一个压电系数矩阵来表示压电材料的压电特性,矩阵如下:
(2)
PVDF的压电常数矩阵则为:
(3)
式中:dij表示j方向受力在i方向上产生电场。d24=d15,并且绝对值基本相同,可认为d24=d15=0。d33比d32大一个数量级,在一般情况下,我们可以忽略这个方向的影响。因此,我们可认为:PVDF仅在极化和延伸方向具有压电效应,其他方向则不存在压电效应,下面我们来分析PVDF在延伸方向的应变。
如果PVDF传感单元上的作用力改变了,由式(2)可知,可由式(4)求出电容两极板产生的电荷Δq。
(4)
式中:Δq表示单位面积的电荷变化量;d3j代表各方向压电常数;Δσj则表示各方向应力的变化量。
在PVDF传感单元上的点(x,y)上,如果0时刻时其电荷密度为(x,y,t0),t时刻的电荷密度则为δ(x,y,t):
(5)
则面积为S的PVDF单元上的电荷Q(t)为:

(6)
后续放大电路接入后,考虑到电荷泄漏,可用式(7)表示在t时刻PVDF产生的电荷总量Q(t)。
(7)
式中:Q(t0)表示0时刻电荷量;i=Q(t)RiC表示偏电流;S代表PVDF单元的面积;C是PVDF的等效电容;Ri表示后续放大电路的输入电阻。
当只受垂直方向的应力作用时,且令σX=σY=0,Q(t0)=0,也就是只有接触而没有滑动时。则
(8)
式中:U(t)表示作用应力的阶跃函数,τ=RiC表示应力激励PVDF电荷响应的时间常数。施加应力与撤销应力时响应的基本形状分别如图3(a)、3(b)所示。
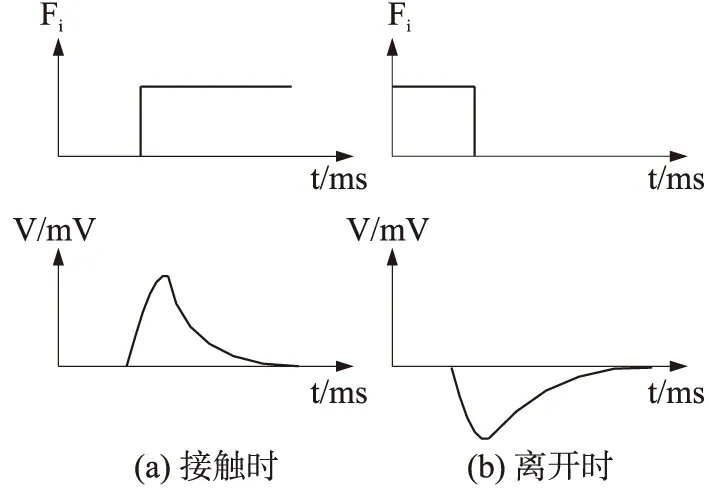
图3 PVDF压电传感器的阶跃响应曲线
3.2 传感器头结构模型及特性分析
传感头部分受力分析示意图如图4所示。
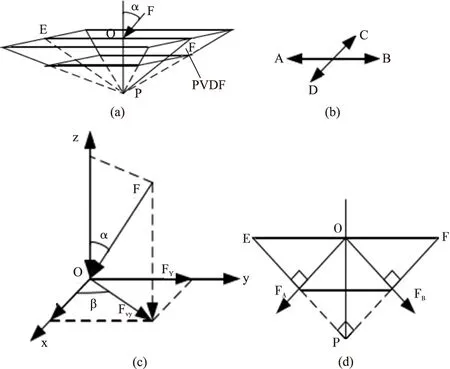
图4 传感头受力分析示意图
由图4(b)、4(c)可知Fx=(FC,FD),Fy=(FA,FB)。图4(d)展示了触觉传感头的剖面图。我们将侧面两边进行延伸,其剖面将是一个等腰直角三角形,经受力点O引出到A和B这两个侧面的垂线,那么EP与FP上面的中点正是垂足所在。从而得出FA、FB的方向,如图4(d)所示。同理可知FC、FD方向。
图4(c)中的受力分析我们可以看出力FA、FB、FC、FD与α、β、F之间的关系:
(9)
(10)
在外力激励作用下,PVDF压电薄膜产生与外力成正比的电荷量Q,经过信号调理电路处理后,将电荷量Q转换成电压量V。根据膜片A、B、C、D产生的的电压值VA、VB、VC、VD便可求得FA、FB、FC、FD,通过式(9)可求出α、β、F,这样我们就可以明确区分出x、y、z3个方向的分力。
PVDF压电薄膜激励产生的电压符合公式:
V∝SF
(11)
式中:S表示压电比例系数;F表示所受压力大小。对式(11)两边分别对FX、FY、FZ求导,得到式(12)。
(12)
根据式(12)可知:①FX对膜片A和B的电压响应没有作用;FY对膜片C和D的电压响应没有作用。②膜片B对FY的电压响应等于膜片C对FX的电压响应。③膜片A对FY的电压响应与膜片D对FX的电压响应相同。④膜片A、B、C、D各个对FZ的电压响应均相同。
上述分析表明:利用这种结构的传感器检测物体受力情况时,其输出信号经过运算处理后,能辨识出物体受力时其三维方向上各分力的具体信息,这些信息对于现存大部分机器人触觉传感器而言,都是难以被测量的。
3.3 滤除热觉信号
PVDF具有热释电效应,当受压力作用时,其表面所产生的将是触觉和热觉的混合信号。触觉信号频率较高,响应和衰减的速度较快,热觉信号则是缓慢变化的低频信号。只有将混合信号中的热觉信号滤除掉,才能更为准确的表达接触力的信息。直接对混合信号进行区分非常困难,所以在传感器的结构上,在水平面的两个方向上采用对称结构(A、B和C、D两组),通过对称面信号之间的减法运算,从而彻底滤除热觉信号。
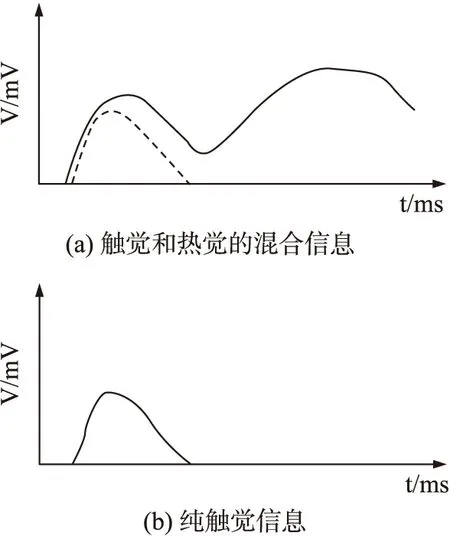
图5 触觉和热觉信号特征
4 调理电路
PVDF压电薄膜受压后产生的电荷极其微弱以致不能直接测量,当所受力大小为10 N时,其所产生电荷量为皮库级别。因此,必须经电荷放大装置将电荷信号转换成电压信号才能进行采集。电荷放大器有两个作用:把压电式传感器的高输出阻抗变换为低阻抗输出;放大压电式传感器输出微弱信号。设计的电荷放大装置是由运算放大器组成的二级放大装置,其线路图如图6所示。
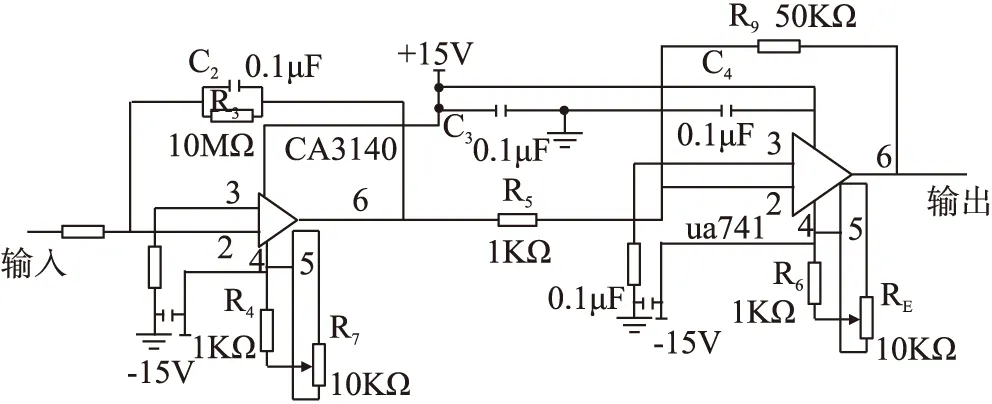
图6 电荷放大器
第1级是一个带电容反馈的高输入阻抗高增益的运算放大器。对于PVDF表面,虽然静态绝缘内阻高达1 TΩ,但在动态受力时,当频率为10 Hz~100 Hz时,其内阻降至100 MΩ~10 MΩ。我们选用CA3140高输入阻抗运算放大器件,反馈电容C1=0.1 μF,反馈电阻R1=10 MΩ,放大倍数可高达2 000。另一个电压放大级实现信号的放大。电压放大级是标准的运算放大电路,将电压放大至数据采集系统易于采集的-5 V~+5 V区间。
5 测试及数据分析
5.1 传感器动态测试分析
为了测试所设计触觉传感器受力时的动态响应,我们采用比较法对其动态特性进行测试。将PVDF触觉传感器和压电陶瓷传感器一同放置在压力正弦发生器平台上,先通过信号发生器产生正弦波激励信号,然后利用功率放大器将信号放大后传输给激振器,从而激振器产生相同频率的振动,作用到传感器上,用示波器观察传感器的输出波形。
在图7中,上方的曲线是压电陶瓷传感器激励响应输出的波形曲线,下方的曲线则是PVDF三维力机器人触觉传感器激励响应输出的波形曲线。对图7分析发现,两者的信号响应频率基本吻合的,因此,可以认为两者性能差异不大,表明所设计的基于PVDF的三维力机器人触觉传感器是科学合理且具有实用价值。
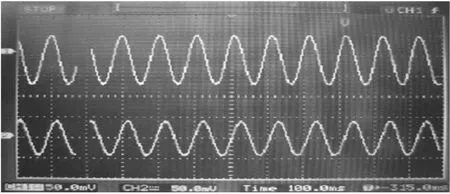
图7 波形对比图
5.2 三维力维间解耦
一般,x、y、z方向力信号间尚有一定的藕合,主要是因为PVDF薄膜的制作及粘贴总是存在误差,好在这种藕合往往是线性的,可通过模拟运算电路得以解耦,图8为信号处理硬件框图。
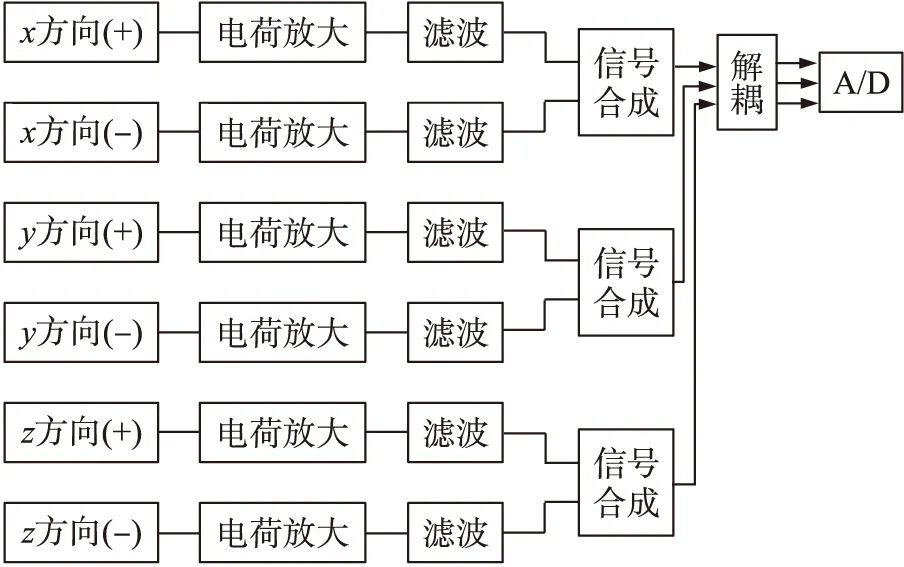
图8 信号处理硬件框图
5.3 应用测试分析
为了能够更为真实地测量不同抓取状态下物体所受三维力信息,依据物理力学中的相关理论,我们在进行具体实验时,是按照夹持方向和水平面所呈角度的不同时来分别提取信息,为了便于说明,我们选取3组具有典型代表特征角度(0°,45°,90°)的夹持力的实验数据来进行三维力分析。通过MATLAB软件进行模拟仿真可得触觉响应曲线如图9~图11所示。
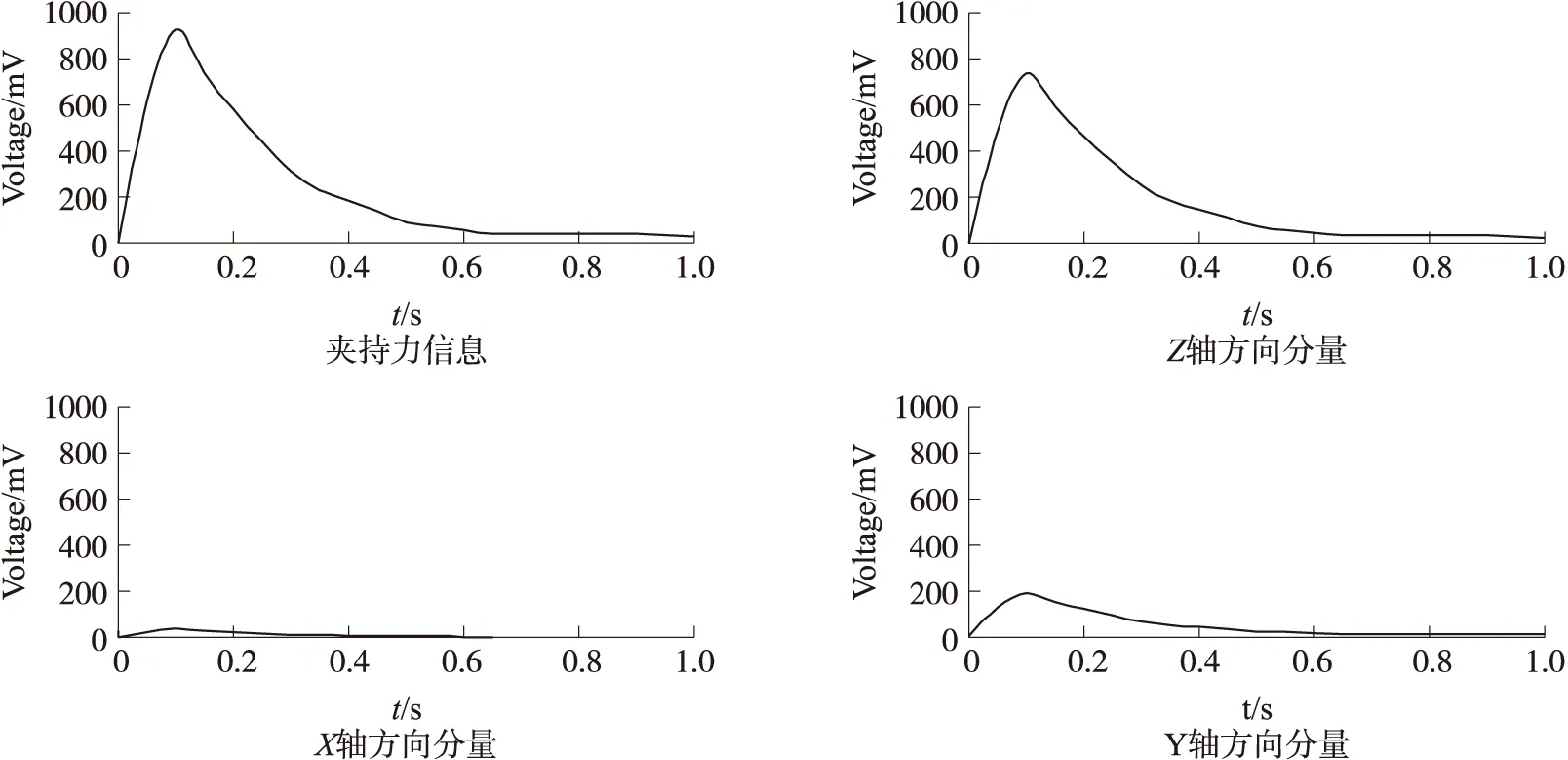
图9 夹持方向和水平面呈0°时
图11 夹持方向和水平面呈90°时
上述触觉响应曲线表明,夹持方向改变,也就是机器人按不同角度抓取同一物体时,传感器各接触面所受分力大小发生改变,从而表明所测得的传感器与物体接触面所受三维力情况是随接触面受力情况的改变而实时变化的。由此表明,本设计能够有效测出机器人与物体接触时物体所受三维力的信息,且具有较高的灵敏度。
6 结束语
本文设计了一种基于PVDF压电薄膜的机器人触觉传感器。通过分析所得仿真结果可以看出,本设计中的传感器在有效检测传感器与物体接触时物体所受三维力信息上具有合理性和可行性。相比较于传统的机器人触觉传感器,本设计中的传感器在灵敏度、结构以及成本上具有一定的优势,且具有一定的实用性及推广价值。
[1] 罗志增. 机器人多感觉传感器系统与多信息融合技术[D]. 杭州:杭州电子科技大学自动化学院,2006.
[2]陈东岳. 具有感知和认知能力的智能机器人若干问题的研究[D]. 沈阳:东北大学信息科学与工程学院,2007.
[3]刘少强,黄惟一,王爱民,等. 机器人触觉传感技术研发的历史现状与趋势[J]. 机器人,2002,24(4):362-366.
[4]温殿英. 聚偏氟乙烯(PVDF)膜对冲击加载的压电响应[J]. 功能有机高分子材料,1998,20(5):1505-1508.
[5]赵冬斌,张文增,都东. 机器人用PVDF触觉传感器的国外研究现状[J]. 压电与声光,2001,23(6):428-432.
[6]黄英,明小惠,向蓓,等. 一种新型机器人三维力柔性触觉传感器的设计[J]. 传感技术学报,2010,23(10):1695-1699.
[7]刘京诚,刘俊,李敏. 基于压电式新型三维力传感器的设计[J]. 压电与声光,2005,27(6):643-645.
[8]具典淑,周智,欧进萍. PVDF压电薄膜的应变传感特性研究[J]. 功能材料,2009,25(8):365-369.
[9]廖波,周国庆,王英杰. 炭黑/硅橡胶导电复合薄膜传感特性研究[J]. 传感技术学报,2013,26(8):1101-1104.
[10]卢惠民,张辉,郑志强. 基于视觉的移动机器人自定位问题[J]. 中南大学学报:自然科学版,2009,40(1):127-131.
[11]张玲,裴柳进. PVDF压电传感器的性能研究[J]. 压电与声光,1999,19(9):199-121.
[12]贾伯年,俞朴,宋爱国. 传感器技术[M]. 3版. 南京:东南大学出版社,2009:27-29.
[13]海振银,高立波,薛晨阳,等. 柔性复合压电薄膜的制备及其电导率研究[J]. 传感技术学报,2014,27(7):861-865.
Design of Three-Dimensional Force Tactile Sensor for Robot Based on PVDF
PANQi,WANZhou*,YIShilin
(School of Information Engineering and Automation,Kunming University of Science and Technology,Kunming 650000,China)
Detecting the force information of an object matters if a robot hand may smoothly grasp the object or not,and the force information may be fully reflected from the three-dimensional direction force. There are still some defects in current tactile sensors for detecting three-dimensional force during grasping. Thus,an attempt was made to design a PVDF-based tactile sensors for three-dimensional force in this paper. The structural design of the sensor was presented,and a signal conditioning circuit was designed. Meanwhile,mathematical model were established for the piezoelectric film and the structure of the sensor head. Besides,the sensor was tested and validated and the results shows that the sensor was effective for detecting three-dimensional force in the process of grasping an object with a robot hand.
tactile sensor;PVDF;three-dimensional force;piezoelectric film

潘 奇(1989-),男,湖北黄冈人,硕士研究生。现于昆明理工大学信息工程与自动化学院控制工程专业攻读硕士学位,主要研究方向为新型传感器技术,326122371@qq.com;
万 舟(1960-),男,副教授,硕士生导师。主要研究方向为有机材料PVDF力学传感器研究,特殊传感器的研究,生产过程自动化系统研究。
2014-12-14 修改日期:2015-02-16
C:0220;0590;1230
10.3969/j.issn.1004-1699.2015.05.007
TP216.1
A
1004-1699(2015)05-0648-06
