远程高速目标高分辨距离成像新方法
2015-05-08李嵬
李 嵬
(中国电子科技集团公司 第二十九研究所,成都 610036)
远程高速目标高分辨距离成像新方法
李 嵬
(中国电子科技集团公司 第二十九研究所,成都 610036)
文中提出了一种基于步进频率信号的高分辨距离成像方法,能够同时获得远程高速目标的无模糊距离和无模糊速度,并实现其高分辨距离成像。根据步进频率信号的运动目标回波模型呈现多分量LFM信号的特点,采用时域解线性调频算法对回波进行多普勒处理,以在很大的测量范围内获得无模糊的速度。对回波信号进行运动补偿,从而获得远程高速目标的一维高分辨距离像。
步进频率;高速目标;距离像;解线性调频
目标识别是现代雷达发展的一个重要方向。对于远程预警雷达,基于高分辨一维距离像的目标识别方法应用最广泛[1]。一维距离像指雷达发射并接收宽带信号,其径向距离分辨率远小于目标尺寸,目标可以模型化为各自独立的散射中心的集合时,这些散射中心在雷达径向距离上的分布情况。对远程高速运动目标,其高分辨一维距离像识别需要大的信号带宽。雷达获取大信号带宽的常用方法有两种:一种是在脉内采用宽带的线性调频脉冲信号;另一种是在脉间采用宽带的步进频率信号。第一种方法需要结合脉冲多普勒技术,利用大的宽带来获取高的距离分辨力,采用傅里叶变换对回波进行多普勒处理后实现对动目标的检测。对远程高速运动目标,由于系统最大无模糊距离的限制,雷达的PRF一般较低,目标在一个相干处理间隔(CPI)内位移大,因而系统高的距离分辨力将导致目标在一个CPI内产生距离门走动,从而使得系统的相干处理增益降低,目标检测性能下降[2]。第二种方法无需发射宽带信号,系统实现成本低,很适合静止目标的成像。对于运动的目标,就需要对目标的运动速度进行测量和补偿,针对这一问题,已提出了时域互相关法[3]、最大似然估计法、最小脉组误差法、最小波形熵法[4]、迭代二分算法[5],这些方法对信噪比要求高、补偿的精度较差,对于高速运动目标的速度估计还会出现模糊,无法有效地进行补偿;双向距离相互相关算法[6]、相位消除法[7]采用高重频解决速度模糊问题,但是会出现距离模糊;二维时域相关方法[8]采用低重频解决了距离模糊问题,但是需要发射多组步进频率脉冲,实时性差。可见,采用上述方法均无法满足对远程高速目标成像识别的需求。为此,本文提出了一种基于步进频率脉冲雷达(stepped frequency pulse radar,SFPR)的多普勒处理方法,只需发射一组低PRF的频率步进脉冲信号,采用时域解线性调频算法(time-domain dechirp and spectrum estimation,DSE)实现对目标回波的相干积累,就能够同时获得大的无模糊速度和无模糊距离,在此基础上对目标进行运动补偿后,就可以获得远程高速目标无模糊的高分辨一维距离像(high resolution range profile,HRRP),进而为远程高速目标的一维距离像识别奠定基础。
1 步进频率脉冲雷达的回波模型
1.1 静止目标回波模型
步进频率雷达发射的第i个脉冲信号描述为[9]
xi(t)=Aiexp[j(2π(fc+iΔf)t+θi)],
iTr≤t≤iTr+Tp
(1)
式中,i=0,1,2,…,n-1;Ai和θi分别是第i个脉冲的幅度和初相;fc为载波起始频率;Δf为频率步进间隔;Tr为脉冲重复周期;Tp为脉冲持续时间,对应的脉冲重复频率记为fr=1/Tr。
在同一个距离单元R处目标的L个散射点,第i个发射脉冲信号经目标延迟τ=2R/c后,其回波信号用发射信号作为参考信号进行正交混频,得到基带信号在t=iTr+Tp/2+τ时的采样值为

(2)
式中,i=0,1,2,…,n-1;σl为第l个散射点散射系数;ΔRl为第l个散射点在距离门内的距离分布;n为一个CPI内的步进频率脉冲个数。
回波信号相位中常数项和一次项均包含距离信息,可以通过IDFT获得目标的一维距离像。
1.2 运动目标回波模型
当目标相对雷达径向运动速度为v时,第i个脉冲的基带回波信号在t=iTr+Tp/2+τ时的采样值为

(3)
初始相位记为
(4)
起始角频率记为

(5)
调频斜率记为
(6)
则式(3)可写为

(7)
式中,i=0,1,2,…,n-1。
由式(7)可见,步进频率雷达运动目标的基带回波是一系列散射点形成的多分量线性调频(LFM)信号的组合。其中,初始频率为目标距离和速度的线性组合,调频斜率与目标速度成正比。目标与雷达之间的径向运动影响回波相位中的一次项和二次项,造成距离像的走动和散焦。因此,需要对运动目标的速度进行估计补偿,才能进行一维距离成像。
2 速度检测方法
2.1 解线性调频算法
对于多分量LFM信号,一般采用时频分析法来估计其参数,其中解线性调频法可以有效地减少参数估计所需的运算量。式(7)的多分量LFM信号,在(0,2π)范围内,用exp(-jμi2)与之相乘,得到解线调后的信号
fμ(i)=m(i)exp(-jμi2)=

(8)
式中,i=0,1,2,…,n-1。fμ(i)的功率谱为

(9)

(10)
2.2 速度测量范围
由式(5)和式(6)可知,解线性调频后信号的起始角频率ω0和调频斜率μ0与目标的运动速度成线性变化,并以2π为周期。对式(5)中由距离延时τl形成的起始频率项进行补偿,并将载波起始频率对应的多普勒频率记为
fdc=2vfc/c
(11)
将频率步进对应的多普勒频率记为
fdΔ=2vΔf/c
(12)
则式(5)和式(6)可写为
ω0=2πfdc/fr
(13)
μ0=2πfdΔ/fr
(14)
由式(13)和式(14),信号峰值在(ω,μ)参数平面的随速度的变化轨迹如图1所示。

图1 (ω,μ)参数平面上信号的峰值轨迹
由图1可见,当LFM信号的起始角频率ω0大于2π时,由于调频斜率μ0也同时变化,信号峰值的轨迹并没有重叠。只有当调频斜率μ0大于2π时,信号峰值的轨迹才会产生重叠。此时,有
fdΔmax=fr
(15)
由式(15)可得到系统最大的无模糊速度为
vmax=frc/2Δf
(16)
而传统脉冲多普勒雷达的无模糊速度为
vmax=frc/2fc
(17)
式中,fc为雷达的载波频率。
由于步进频率雷达的频率步进值Δf远小于其载波频率fc,由式(16)和式(17)可以看出,基于时频处理的步进频率脉冲多普勒雷达的无模糊速度范围要比传统PD雷达大得多。例如,一部低PRF的X波段步进频率脉冲多普勒雷达,其fc=10GHz,fr=100Hz,Δf=10MHz,则无模糊距离为1 500km,无模糊速度为1.5km/s。而对于相同参数的传统PD雷达,无模糊速度仅为1.5m/s。
3 运动补偿与成像算法
由于目标相对于雷达之间的径向运动,一维距离像会发生走动和散焦,需要利用估计出的速度值进行补偿。定义补偿因子
(18)
式(7)乘以C(i),得

(19)
对s(i)做IDFT得到其频谱

(20)

(21)
峰值点坐标k=kl时的对应距离为
ΔRl=(c·kl)/(2NΔf)
(22)
4 仿真结果
本文采用计算机仿真对上述方法的有效性进行了验证,并与已有的步进频率雷达处理方法的成像性能进行了对比。为了简化起见,在实际仿真中假设雷达发射脉冲的幅度Ai为常数1。根据远程高速的应用场景,设置仿真所用目标的主要参数如表1所示。针对目标的高分辨成像的需求,设计雷达的主要参数如表2所示。
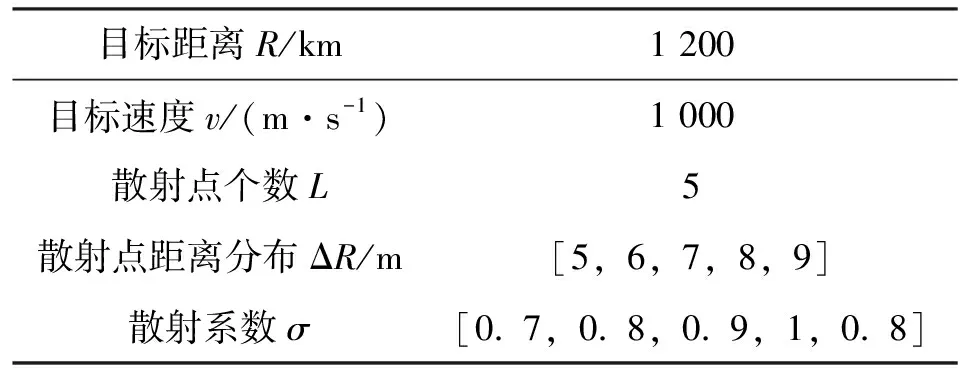
表1 目标参数设置
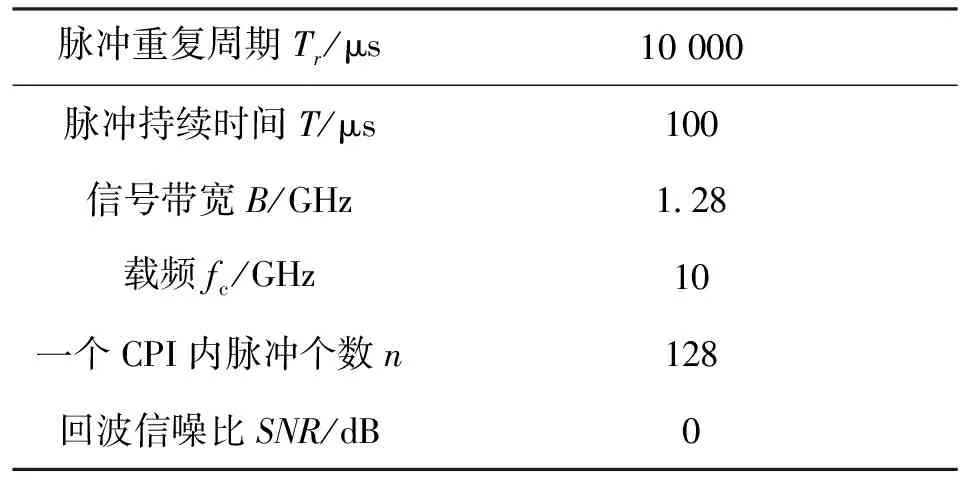
表2 步进频率脉冲雷达参数设置
由表1、表2可以得出,雷达可测的最大无模糊速度为1 500m/s,最大无模糊距离为1 500km。在一个CPI内目标相对雷达的位移为1.27km,距离门宽度为15km,未发生距离门走动,能够对回波进行相关积累。同样参数的LFM脉冲雷达,经过脉冲压缩后,距离门宽度仅为12cm。对高速运动的目标会出现严重的距离门走动,造成检测前信噪比下降,且无法得到正确的一维距离像。
步进频率脉冲雷达采用表1、表2的参数,不考虑杂波影响时目标高分辨距离像的仿真结果,如图2~图4所示。图2为未进行运动补偿时目标归一化距离像仿真结果。由分析可知,目标相对于雷达的径向运动会造成一维距离像的走动和散焦,而对高速目标,其采样后信号的频谱还将发生混叠,

图2 未补偿的高分辨距离像
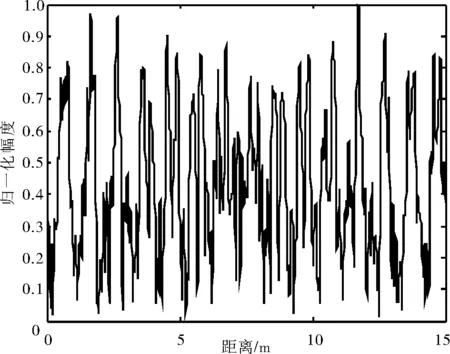
图3 模糊速度补偿的高分辨距离像
无法获得正确的一维距离像。时域互相关法进行速度估计与补偿后的归一化距离像成像[3],如图3所示。该方法的最大无模糊速度仅为11.7m/s,对于仿真中设定的目标速度的解算会出现高度模糊,最终得到的速度仅为3.1m/s(模糊重数为85),从而造成补偿后一维距离像无法聚焦,生成的一维距离像也与真实结果不符。采用本文方法对速度进行测量与补偿后得到的归一化距离像成像,如图4所示。根据该算法解算出的速度为1 000.0m/s,与目标真实速度值相差很小,在进行速度补偿和相关积累后信噪比提高,获得了目标真实的一维距离像。
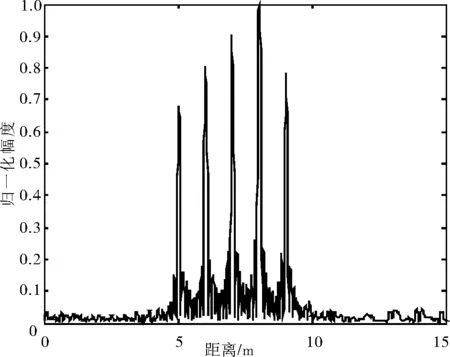
图4 无模糊速度补偿的高分辨距离像
5 结束语
本文根据步进频率脉冲多普勒雷达动目标回波表现为多分量LFM信号的特点,采用时频分析理论中时域解线性调频算法对回波信号进行多普勒处理,克服了传统高距离分辨雷达探测高速运动目标时存在的距离门走动问题,在获得与脉冲数相同的相干处理增益的同时,还具有很大的无模糊速度测量范围。这种方法突破了传统PD雷达设计中PRF无法同时兼顾无模糊测距范围和测速范围的问题。可以获得远程高速目标的一维高分辨距离像,为后续目标识别奠定了基础。
当存在多个运动目标时,其运动补偿将会变得复杂,同时文中的时频分析方法会存在交叉项的问题,从而影响系统的性能。因此,还需研究新的时频分析和运动补偿方法,进一步提高步进频率脉冲多普勒雷达的多目标检测性能。
[1]ChenHangyong,LiuYongxiang,JiangWeidong,etal.Anewapproachforsynthesizingtherangeprofileofmovingtargetsviastepped-frequencywaveforms[J].GeoscienceandRemoteSensingLetters, 2006,3(3):406-409.
[2]Deudon, Francois. Velocity dealiased spectral estimators of range migrating targets using a single low-PRF wideband waveform [J]. Aerospace and Electronic Systems, IEEE Transactions on,2013,49(1):244-265.
[3]Hu Xiujuan. An adaptive compensation of moving target doppler shift for airborne radar[C].//Aerospace conference, 2009 IEEE.[s.l.]:IEEE Press,1-6.
[4]Wang Wei. A Novel Velocity Compensation Algorithm by Geometrical Inference Matching Method[C].//Radar Conference, 2009 IET International.[s.l.]:IEEE Press,2009:1-4.
[5]Li-min Yang.Synthetic Ultra-wideband Radar Range Profile Based on Stepped Frequency Pulse Trains[C].//Ultra-Wideband (ICUWB), 2010 IEEE International Conference.[s.l.]:IEEE Press,2010(2):1-4.
[6]Li Lei. Velocity Estimation In Stepped-Frequency Radar.[C].//Radar Conference, 2009 IET International,1-4.
[7]Chen Hangyong. A New Approach for synthesizing the range profile of moving targets via stepped-frequency waveforms[J].Geoscience and Remote Sensing Letters, IEEE, 2006,3(3):406-409.
[8]陈祝明,何奎,段锐,等. 基于时域解线性调频的步进频率雷达动目标检测方法[J].电子科技大学学报,2012,41(5):658-662.
A New Method of High Resolution Range Imaging for Targets with High-speed and Long-range
LI Wei
(China Electronics Technology Group Corporation No.29 Research Institute, Chengdu 610036, China)
A high resolution range imaging method based on SFPR is proposed. This technology can obtain large unambiguous velocity and unambiguous range simultaneously. According to the characteristics that the echo model of moving target in SFPR can be expressed as a multi-component LFM signal, DSE method is adopted to perform Doppler processing and obtain the target’s unambiguous velocity by which the motion in echo signal is compensated. Thus the HRRP of the target with high-speed and long-range is obtained.
stepped frequency; high-speed targets; range imaging; time dechirping
2015-06-29;修改日期: 2015-07-15
李 嵬(1979-),男,工学硕士,工程师,主要从事电子对抗系统及其信号处理方面的研究。
TN953;TN
Adoi:10.3969/j.issn.1672-4550.2015.04.009