基于两级滤波的车辆相对加速度估计
2015-05-08汤文成张为公
宋 翔 汤文成 李 旭 张为公
(1东南大学仪器科学与工程学院,南京210096)(2东南大学机械工程学院,南京210096)
基于两级滤波的车辆相对加速度估计
宋 翔1汤文成2李 旭1张为公1
(1东南大学仪器科学与工程学院,南京210096)(2东南大学机械工程学院,南京210096)
针对智能交通中汽车防追尾碰撞预警技术难以准确获取车辆间相对加速度,从而影响预警准确性的不足,提出了一种基于两级卡尔曼滤波的相对加速度估计方法.首先建立准确描述车辆间相对加速度变化的车辆相对运动模型,利用卡尔曼滤波递推方法初步估计出相对加速度值.然后进一步结合相对速度信息,利用第二级卡尔曼滤波估计相对加速度的误差,对初步估计的相对加速度值进行修正,从而获取较为准确的相对加速度信息.实车试验结果表明,该方法的准确性和可靠性好,加速度估计误差小于0.5 m/s2.
智能交通;相对加速度估计;两级卡尔曼滤波;误差修正;防追尾碰撞系统
事故的统计资料表明,车辆追尾碰撞事故是高速公路上最主要的事故形态.因此追尾碰撞预警系统是智能交通系统的重要组成部分,而准确、合理、全面、科学的防追尾碰撞预警算法则是其核心和关键.当前的防追尾碰撞算法主要分为基于安全时间和基于安全距离的碰撞算法,无论哪种算法,都需考虑自车与前车间的相对加速度.相对加速度信息影响着安全距离和安全时间的取值,其准确与否直接影响算法的准确性和有效性[1].由于缺乏有效的相对加速度获取途径,已有研究的算法中往往忽略了相对加速度这个信息,或者认为相对加速度为0或其他常数[2],与实际行驶状况相差较大,从而导致算法的准确性不高,虚警率和漏警率较高.
当前的研究中,相对加速度的获取有3个可能的途径:① 自车与前车都安装加速度计,通过车车通信的方式交互信息,从而计算出相对加速度[3-4],但车车通信尚处于研究阶段,尚未投诸于实际应用,仅限于理论研究.② 通过对雷达所测得的相对车速信息进行微分以获取相对加速度[5],但由于微分计算本身的特点,这种方法所获取的相对加速度信息准确性低,误差大,且存在数据丢失和延时的情况,不适宜于预警安全系统.③ 在车辆跟踪领域里,建立车辆相对运动的模型,通过滤波估计的方法获取相对加速度信息[6-7],但这种方法的有效性取决于模型的准确性和观测信息的有效性.现有的研究中,常用的模型是匀速模型与匀加速模型,以及利用多模型[8-9]方法结合这2种模型建立状态空间方程.假设匀速模型相对加速度为0,并且假设匀加速模型相对加速度恒定,都无法准确描述车辆相对加速度的变化,同时由于缺乏有效的加速度观测信息,从而估计出的相对加速度信息误差较大.
本文提出一种基于两级卡尔曼滤波的车辆相对加速度估计方法,通过建立更为准确描述车辆间相对加速度变化的运动模型,以雷达传感器输出的相对距离和相对速度作为观测向量,利用卡尔曼滤波递推初步估计出相对加速度值,进一步利用相对速度信息估计相对加速度误差,修正初步估计的相对加速度值,从而获取较为准确的相对加速度信息.
1 相对加速度估算方法
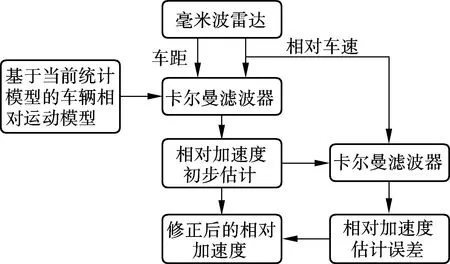
图1 估计方法流程图
本文所提出的车辆相对加速度估计方法如图1所示.以毫米波雷达所输出的自车与前车间的距离和相对速度作为观测变量,利用能够描述车辆相对加速度变化的“当前”统计模型建立车辆相对运动模型,通过卡尔曼滤波递推获取初步估计的相对加速度ar,e,将ar,e与雷达传感器所获取的相对速度信息相结合建立卡尔曼滤波模型,以估计相对加速度误差,从而对ar,e进行修正,获取最终估计的相对加速度值ar.
1.1 相对加速度初步估计
建立用于描述车辆相对运动的状态空间方程的一个难点是如何描述车辆相对加速度的变化.本文借鉴导航领域机动载体的“当前”统计模型用以描述车辆相对加速度的统计分布.该模型认为,当目标现正以某一加速度运动时,它在下一瞬时的加速度取值范围是有限的,只能在“当前”加速度的邻域内.建立离散化后的系统状态方程和观测方程为
(1)


且其中的相对加速度方差σ2的确定方法为
(2)

对式(1)所描述的系统状态方程和测量方程,运用卡尔曼滤波理论[10],建立下面的标准滤波递推过程,估计出车辆间相对加速度的初步估计值:
U1(k-1)
(3)

(4)

(5)
(6)
(7)
1.2 相对加速度修正
由于初步估计出的相对加速度信号存在偏差,通过其积分得到的相对速度也会有偏差.考虑到雷达传感器能提供较为精确的相对速度信息,因此将雷达传感器所获取的相对速度信息与所估计出的相对加速度信息相结合,得到相对加速度误差.
以初步估计的相对加速度ar,e作为输入,以雷达传感器所测量的相对速度vr,r作为输出,取系统状态变量为X2=[vre]T.e表示初步估计出的相对加速度的误差.假设e具有缓变特征,则可建立离散化后的系统状态方程和观测方程,即
(8)
W2与V2是互不相关的零均值系统白噪声和观测白噪声向量,其协方差矩阵分别为Q2与R2.对式(8)所描述的系统状态方程和测量方程,通过标准卡尔曼滤波递推过程,估计出加速度初步估计的误差,进而用所估计出的误差来修正相对加速度初步估计值,获取较为准确可靠的相对加速度值.
2 试验验证
试验采用德尔福(Delphi)公司推出的多模式电子扫描雷达(ESR)获取相对速度和相对距离信息,ESR雷达输出频率为20 Hz,能够提供处理后较为准确的相对距离和相对速度信息.利用基于PC104的工控机实时同步采集数据,借助采集软件的时钟功能,同时采用2个MEMS-INS传感器同步采集自车和前车的加速度信息,从而实时计算出实际的相对加速度信息作为真值,以验证算法的准确性.
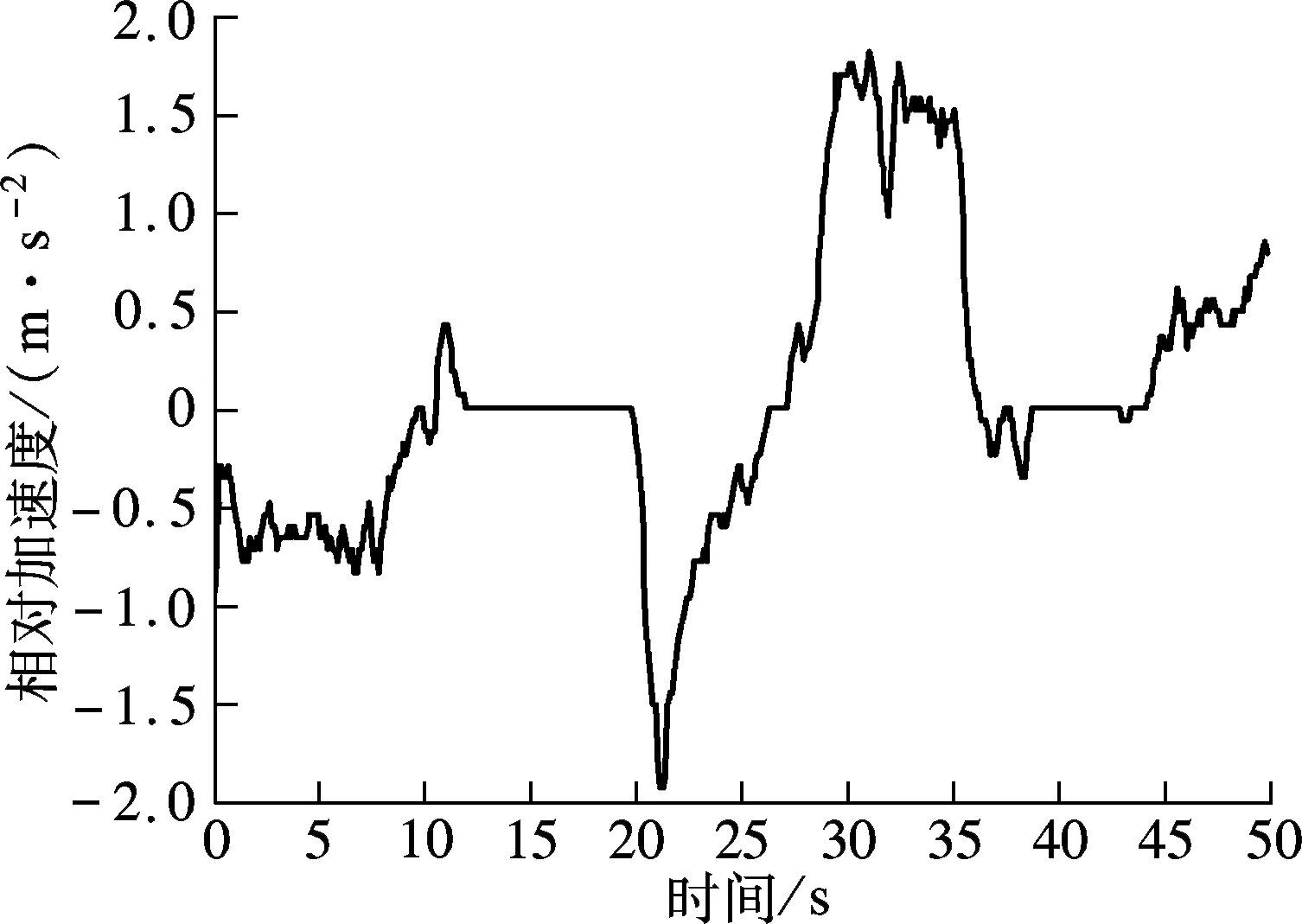
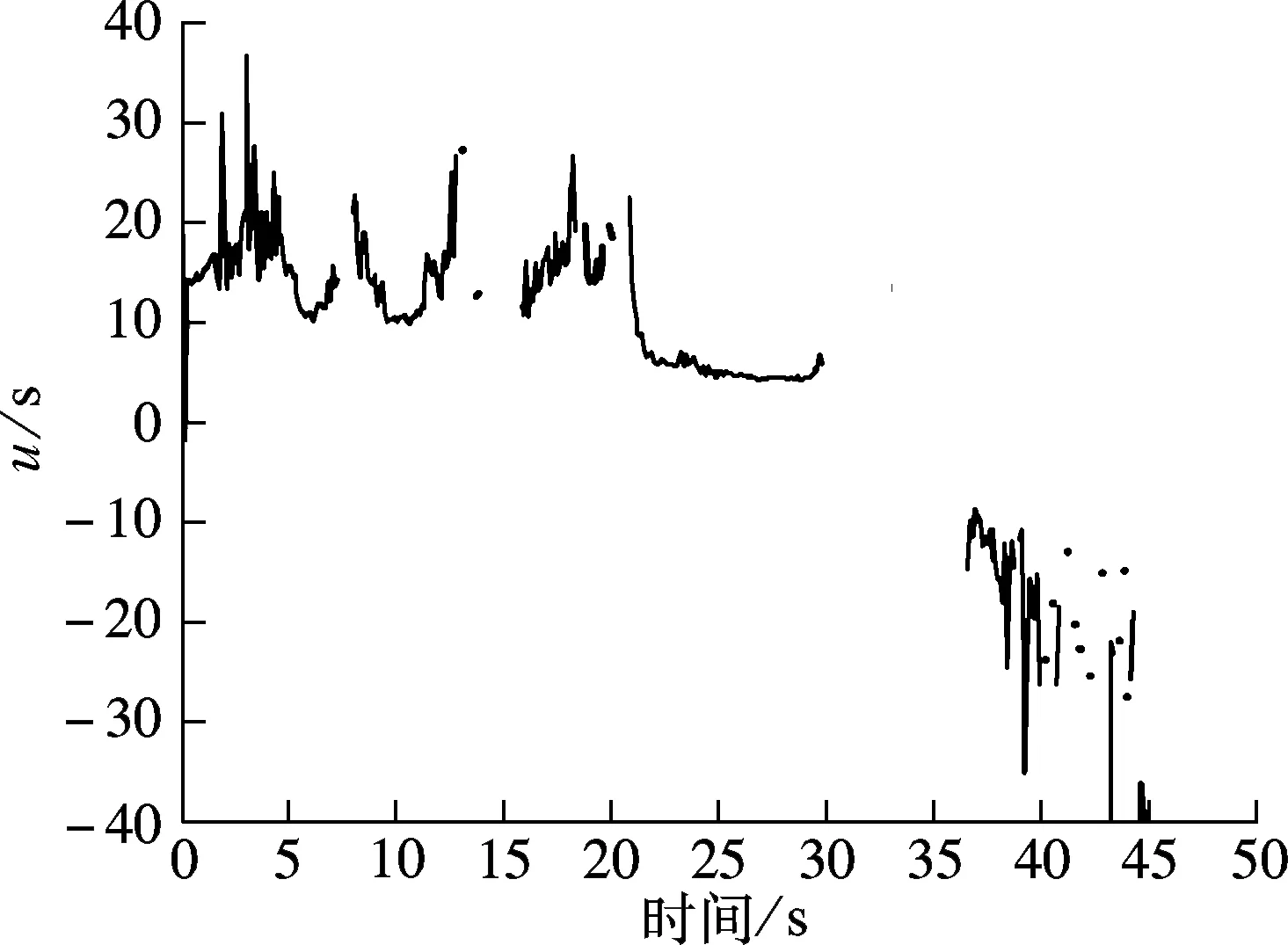
以某次试验为例,时长为50 s,雷达所采集的信息见图2.图3为相对加速度的估计信息,为了进行比较,同时利用五点欧拉前向差分法对相对加速度信号进行估计,并将利用2个MEMS-INS传感器实时同步采集自车和前车加速度信息所计算出相对加速度信息作为真值与本文方法所估计结果进行比较.由图3可见,基于差分的相对加速度估计值误差较大,存在数据丢失现象且存在延时,导致曲线不连续,但符合相对速度变化的趋势.初步估计(即基于模型的方法)无延时和数据丢失,曲线连续,但在某些点处不符合相对速度变化的趋势,而修正后的相对加速度估计值则结合了这2种方法的优点,具有较高的准确性且符合相对速度变化的趋势.以27~30 s处为例,相对速度处于上升趋势.相应的相对加速度应大于0,基于差分方法估计结果为大于0,而修正前的相对加速度却小于0,通过修正,所估计的相对加速度具有更高的准确性.图4为估计值与真值之间的误差,可见本文方法误差较小,加速度误差小于0.5 m/s2,能够满足车辆防碰撞算法的需求.同时可注意到,相对加速度信息变化较大,而本文所提出方法对不同变化情况都具有良好的适应性.卡尔曼滤波方法的实时性也保证了该方法能够应用于实际系统.
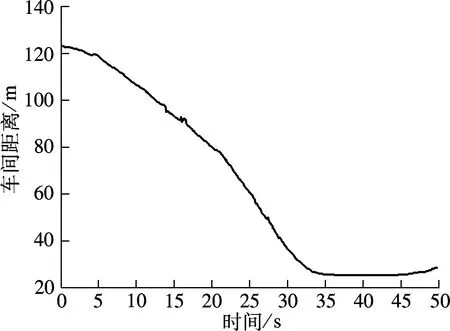
(a) 车距信息
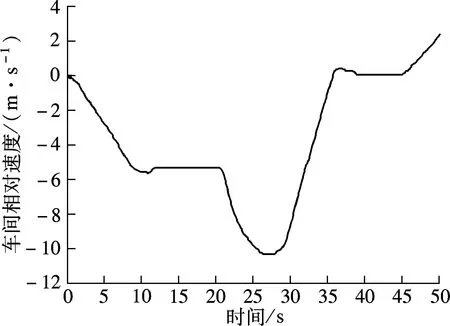
(b) 相对速度信息

(a) 基于本文方法的相对加速度估计
(b) 基于差分法的相对加速度估计
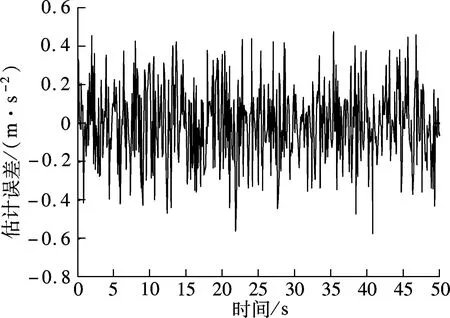
图4 估计误差
下面以基于安全时间的TTC(time to collision)追尾碰撞预警算法为例,说明所估计出的相对加速度信息对于防碰撞预警算法的重要性.TTC定义为车辆保持此时的相对运动状态、距离所发生碰撞的时间.传统的TTC计算方法为
(9)
式中,u表示TTC值.由式(9)可见,该方法忽略了车辆间的相对加速度信息.考虑车辆间相对加速度信息后,有
d+vru+0.5aru2=0
(10)
解式(10),可得
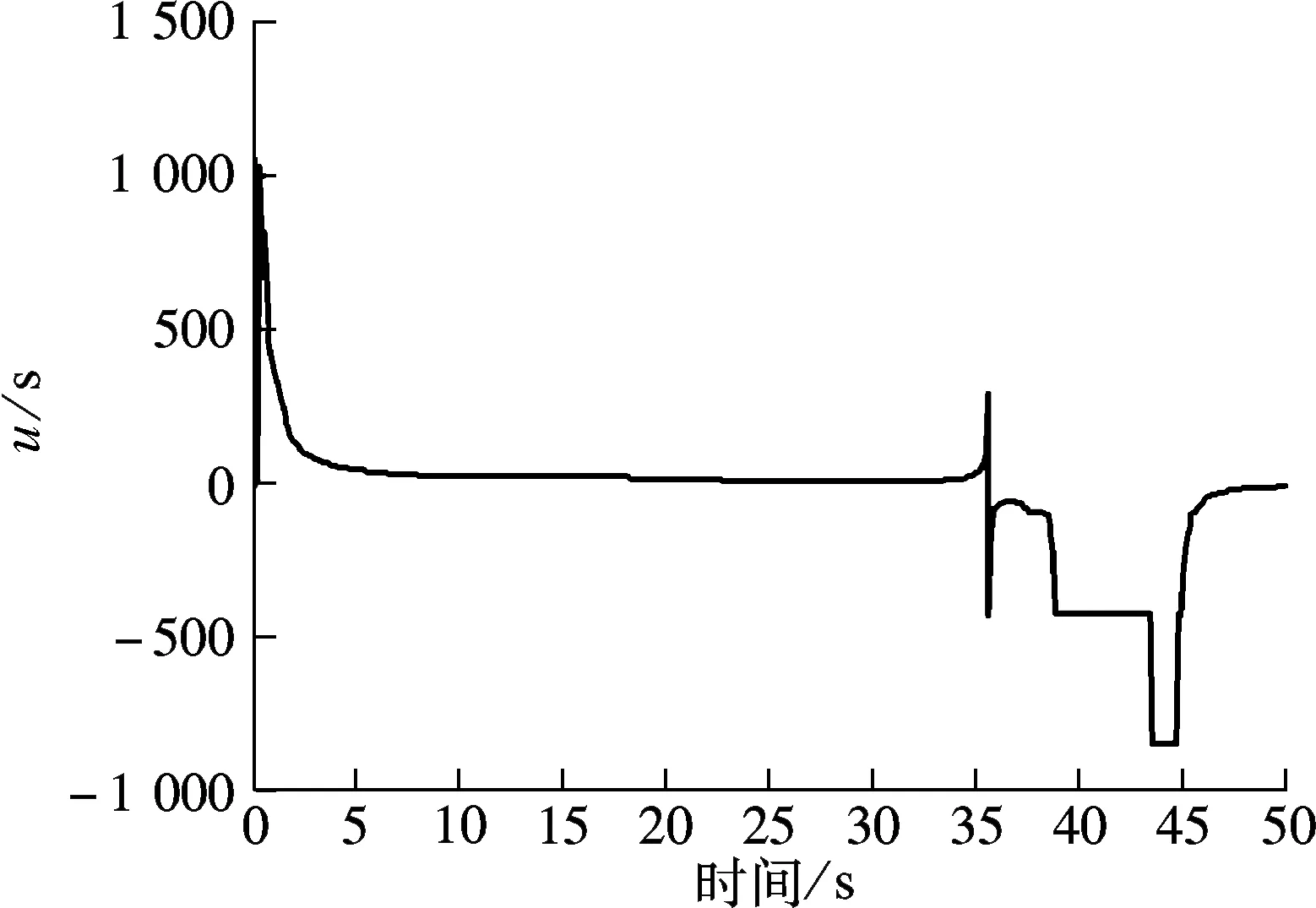
(a) 传统的TTC计算方法
(b) 改进后的TTC计算方法
3 结语
本文提出了一种基于两级卡尔曼滤波的车辆间相对加速度估计方法,以满足车辆防追尾预警系统的需求.实车试验结果表明,该算法具有较好的准确性、可靠性和适应性,误差小,能够为汽车防碰撞预警系统提供准确、可靠的相对加速度参数,且仅需毫米波雷达传感器,不需要其他附加传感器,有效地降低了成本.卡尔曼滤波方法也保证了该方法的实时性.该方法的关键是利用雷达所获取的较为准确的相对速度信息来对相对加速度估计值进行校正,因此,进一步研究的重点是对雷达传感器所提供信息进行更为有效的处理,以进一步减小估计误差.
References)
[1]Chang T H, Hsu C S, Wang C, et al. Onboard measurement and warning module for irregular vehicle behavior[J].IEEETransIntellTransportSyst, 2008, 9(3): 501-513.
[2]Jansson J, Gustafsson F. A framework and automotive application of collision avoidance decision making[J].Automatica, 2008, 44(9):2347-2351.
[3]Toledo-Moreo R, Zamora-Izquierdo M A. Collision avoidance support in roads with lateral and longitudinal maneuver prediction by fusing GPS/IMU and digital maps[J].TransportationResearchPartC:EmergingTechnologies, 2010, 18(4): 611-625.
[4]Taleb T, Benslimane A, Ben Letaief K. Toward an effective risk-conscious and collaborative vehicular collision avoidance system[J].IEEETransVehicleTech, 2010, 59(3): 1474-1486.
[5]Park S, Hwang J P, Kim E, et al. Vehicle tracking using a microwave radar for situation awareness[J].ControlEngineeringPractice, 2010, 18(4): 383-395.
[6]Edelmayer A, Miranda M, Nebehaj V. Cooperative federated filtering approach for enhanced position estimation and sensor fault tolerance in ad-hoc vehicle networks[J].IETTransIntellTransport, 2009, 4(1): 82-92.
[7]Gustafsson F, Gunnarsson F, Bergman N, et al. Particle filters for positioning, navigation and tracking[J].IEEETransSignalProcessing, 2002, 50(2): 425-437.
[8]Kim Y S, Hong K S. An IMM algorithm for tracking maneuvering vehicles in an adaptive cruise control environment[J].InternationalJournalofControlAutomationandSystems, 2004, 2(3): 310-318.
[9]Rodriguez S A F, Frémont V, Bonnifait P, et al. An embedded multi-modal system for object localization and tracking[J].IEEEIntelligentTransportationSystemsMagazine, 2012, 4(4): 42-53.
[10]李旭,宋翔,张为公.基于扩展卡尔曼滤波的车辆状态可靠估计[J].东南大学学报:自然科学版,2014,44(4):740-744. Li Xu,Song Xiang,Zhang Weigong.Reliable vehicle state estimation based on improved extended Kalman filter[J].JournalofSoutheastUniversity:NaturalScienceEdition,2014,44(4):740-744.(in Chinese)
Estimation of vehicle relative acceleration based on two-level filter
Song Xiang1Tang Wencheng2Li Xu1Zhang Weigong1
(1School of Instrument Science and Engineering, Southeast University, Nanjing 210096, China) (2School of Mechanical Engineering, Southeast University, Nanjing 210096, China)
The accurate relative acceleration is difficult to obtain by vehicle rear-end collision warning algorithm in intelligent transportation. In order to meet the accurate requirement of the relative acceleration, an estimation method based on two-level Kalman filter is proposed. The relative motion model of vehicles is established, which can accurately describe the relative acceleration changes. The relative acceleration is preliminary estimated by using Kalman filter. Then the relative speed is employed to estimate the relative acceleration error by using the second level Kalman filter. Therefore, the preliminary estimation results of relative acceleration can be corrected. And an accurate and reliable relative acceleration is accurately and reliablely obtained. The real vehicle test results show that the proposed estimation method has advantages with high accuracy, good reliability and strong adaptability. The acceleration estimation error is less than 0.5 m/s2.
intelligent transportation; relative acceleration estimation; two-level Kalman filter; error correction; rear-end collision avoidance system
2014-09-09. 作者简介: 宋翔(1984—),男,博士; 李旭(联系人),男,博士,副教授,博士生导师, lixu.mail@163.com.
国家自然科学基金资助项目(61273236)、江苏省自然科学基金资助项目 (BK2010239)、 江苏省博士后科研资助项目 (1401012C).
宋翔,汤文成,李旭,等.基于两级滤波的车辆相对加速度估计[J].东南大学学报:自然科学版,2015,45(1):51-55.
10.3969/j.issn.1001-0505.2015.01.010
U467.4
A
1001-0505(2015)01-0051-05
