减摇鳍在百吨级渔政船上的应用效果分析
2015-05-08游贵标孙义平张春龙张先宇
朱 航, 游贵标, 孙义平, 张春龙, 张先宇
(上海羽翼船舶设备有限公司, 上海 201612)
减摇鳍在百吨级渔政船上的应用效果分析
朱 航, 游贵标, 孙义平, 张春龙, 张先宇
(上海羽翼船舶设备有限公司, 上海 201612)
百吨级渔政船没有安装减摇装置时在三级以上海况下会发生剧烈横摇,对人员以及设备都会有严重影响。结合百吨级渔政船实际使用海况,详细对比计算了有无减摇装置时的横摇运动特性,并以安装减摇鳍装置为例,指出了减摇鳍装置应如何针对本船特点进行优化设计。计算分析表明,安装合适的减摇鳍后,这类船的横摇幅值会显著减小,通常减摇效果达60%~80%,能明显改善船员的生活作业环境,提高执法出勤率。
渔政船 减摇鳍 陀螺减摇器
1 前言
百吨级渔政船作为各省市以及海区渔政管理部门的主力执法公务船,主要执法区域是沿海近海海区以及内河航道,工作海况大都在2~3级,极少数在4级,极端情况下可能达到5级。尽管大多数情况下,工作海况不算太恶劣,但因船的吨位不大,加上船体瘦长,船的横摇运动仍然比较严重。如果没有安装减摇设备,船员可能感到晕船,对设备的安全运行也会带来不利影响,导致船员和船只的出勤率严重下降。
适合轻小型船只使用的减摇装置主要有减摇鳍和陀螺减摇器。前者的优势是按照设计航速正常巡航时减摇效果十分明显,后者的优势是可以在任意航速下减摇。本文以某渔政船安装固定式减摇鳍装置为例,详细分析减摇鳍的应用效果。
2 减摇鳍装置基本工作原理
为减小船的横向摇摆运动,必须施加给船一个稳定力矩Mst。该稳定力矩应与波浪扰动力矩相位相反,用于抵消波浪力矩对船体的作用。减摇鳍就是能对船有效产生稳定力矩的一种装置。
减摇鳍是装在船舶左右舭部水线下剖面形状呈对称的流线型水翼。当船舶以速度V航行时,若一舷鳍相对于来流速度方向偏转α角度,如图1(a)所示,则因上下翼面来流流速之差导致的压力差在鳍上产生一向上的升力P,升力的值为
(1)

若另一舷的鳍向反方向偏转同样的角度,则产生一个向下的升力P,如图1(b)所示。左右两舷鳍升力的作用下将对船形成一个稳定力矩Mst。
(2)
R为鳍升力作用点至横摇轴线的距离。
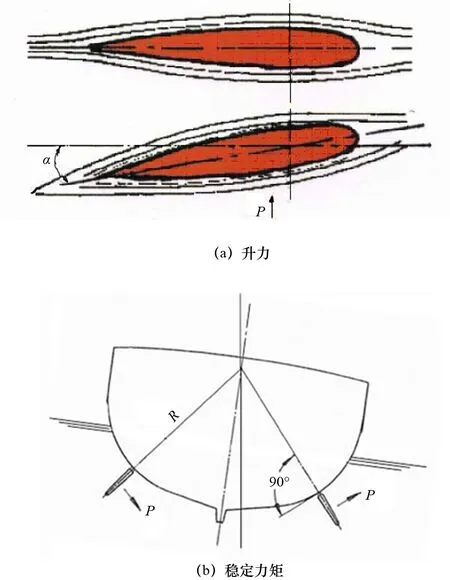
图1 升力及稳定力矩
对于安装有减摇鳍的船舶,减摇鳍控制系统根据需要不断调整鳍角α的大小和方向,使鳍对船产生减摇力矩,最大限度地抵消波浪对船的扰动力矩,从而起到稳定船舶、减小摇摆的作用。
3 船舶横摇运动性能预报
3.1 某例渔政船主要参数
船长L: 35.4m;
吃水T:1.90m;
船宽B: 6.2m;
初稳心高h: 0.671m;
排水量D:215.06t;
水线面系数CWP: 0.734;
方形系数CB: 0.432;
舭龙骨面积Sb: 17m2;
设计航速V: 16kn=8.231m/s;
船舶自摇周期: 6.08s;
海况(三一浪高)ξ1/3:3~5级海况,0.5~4m。
3.2 减摇前船舶的横摇运动性能预报
通常为了计算简便,海浪谱取ITTC单参数谱[1],其表达式如下:
(3)

(4)
以恒定航速在海浪中航行的船舶,通常在某一个航向上发生的横摇最为剧烈。这个航向称为共振航向,共振航向角可以由下式计算:
(5)
式中:ω0为船的自摇频率。同时,当船舶以一定的航速航行时,作用在船舶上的干扰力频率与真实波浪频率并不相一致,这种现象叫做多普勒频移。因此,船舶在共振航向下航行时的遭遇频率为
(6)
船舶具有一定的船宽和有限吃水,因而真正作用于船舶的波倾角与波面角并不相等,而是波面角乘以一定的修正系数,称之为有效波倾角[2],有效波倾角谱与波面角谱有如下关系:
(7)
式中:XB、XT分别为船宽修正系数和吃水修正系数,可由有关资料查得。
由此可以得到未减摇船舶横摇角谱
(8)
式中:μ为设计航速下无因次横摇阻尼系数,根据有关资料[3]查得。
未减摇横摇角的统计特性与横摇角谱之间有如下关系:
(9)
(10)
(11)
由公式(9)、(10)、(11)即可计算出本船在不同海况下以16kn航速沿着共振航向角航行时未减摇的横摇角,如表1所示。
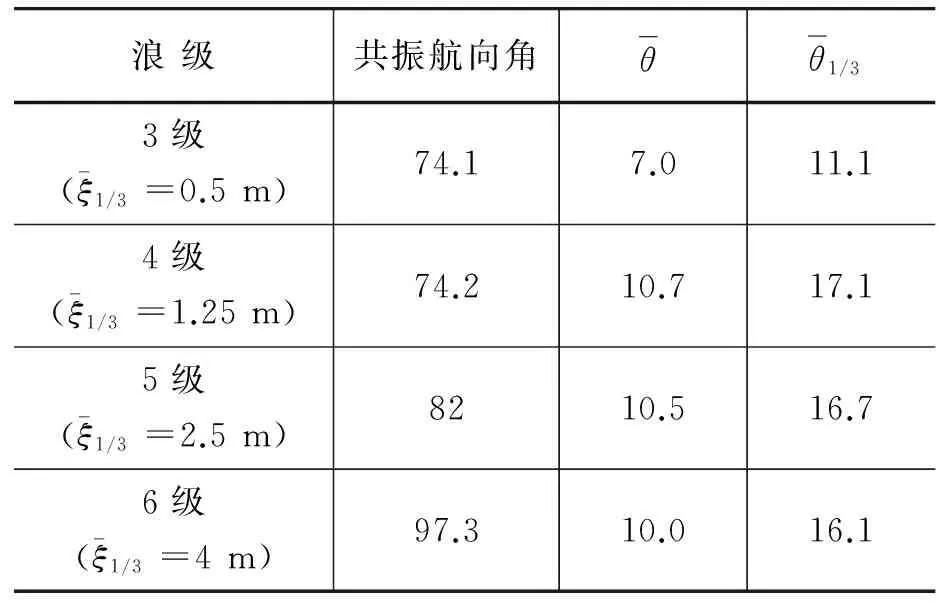
表1 本船在不同海况下未减摇的横摇状态参数表 单位:(°)
由表1可知,本船在4级海况下发生的横摇摇摆幅值最大,这主要是因为在这个海况下波浪的平均频率比较接近船舶的自摇频率而发生谐摇导致的。随着海况的增加,波浪的平均频率向低频移动,偏离船舶的共振频率,船舶的摇摆增加并不明显甚至减少。
3.3 减摇后船舶的运动性能预报
减摇鳍工作后,船舶的横摇角谱如下:
(12)
式中:μs=μ+μ0是减摇鳍工作以后,船舶整体的横摇阻尼;μ0是减摇鳍工作带来的附加阻尼。
根据横摇角谱可以计算得到减摇以后的船舶横摇角的统计特性如下:
(13)
(14)
(15)
由此可得本船在不同海况下减摇后的剩余横摇角以及减摇效果,如表2所示。
表2 本船在不同海况下减摇后的横摇状态参数表
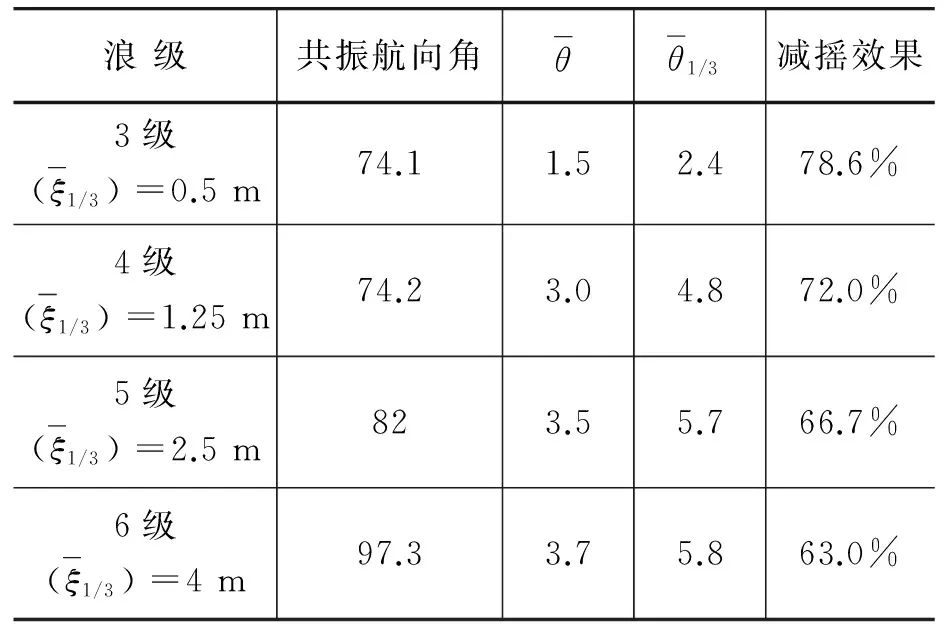
单位:(°)
4 减摇装置效能分析
上述计算是以共振航向角航行状态计算得出的最严重的预报结果,实际航行以共振航向角状态航行概率很小,实际的未减摇横摇角度和减摇后的剩余横摇角度都要比计算值小。由以上对比分析可以看出,安装减摇鳍后,本船在通常工作海况下,平均剩余横摇角能满足用户通常提出的小于4°的要求,减摇效果基本在60%~80%之间,能显著改善船舶的适航性。
将谱分析方法用于船舶运动的预报计算,可以获得较为准确的结果,这种方法在近些年已被广泛应用,预报结果与实船情况相符很好。本文也采用了该方法,使计算结果更准确,可以成为设计人员对减摇设备进行精确选型计算时的重要参考。
5 减摇鳍参数
根据满足上述减摇要求的μ0,由下式可以确定所需减摇鳍单鳍的面积[4]:
(16)
式中:k为放大系数,由经验选取,通常取9~14。
根据以上计算分析,并结合鳍在船上布置的实际情况,可以确定本类渔政船型最合适的鳍的几何要素如下:
[][]
鳍型:NACA-0015;
展弦比:0.70;
展长:529 mm;
平均弦长:756 mm;
鳍面积:0.4 m2;
装置外形尺寸:
执行机构+鳍:~857×1 364×1 106 mm;
液压机组:~900×500×750 mm;
控制箱:~500×600×250 mm;
面板:~226.5×163×36 mm;
装置总重量:~450 kg;
装置消耗功率:~5.5 kW。
这种单鳍面积较小的减摇鳍体积较小,重量较轻,所消耗的功率也较小,十分适合安装于该型号的渔政船上。尽管国内单鳍面积在0.5 m2及以下的减摇鳍还没有实船安装的案例,但是在外国游艇市场这种超小型减摇鳍(最小单鳍面积达到0.2 m2)应用得十分普遍,有几家甚至对鳍翼采用非金属材料利用压铸模批量制造。非金属鳍翼的好处是能显著改善鳍表面的线型以及光洁度,提高升阻比和美观度。
6 结语
通过以某百吨级渔政船为例进行的详细计算分析可以看出,该船安装一对单鳍面积为0.4 m2的减摇鳍后,船的横摇幅值明显减小,通常减摇效果达60%~80%,能显著改善船员的生活作业环境,有利于提高执法出勤率。
[1] 陶尧森.船舶耐波性[M].上海:上海交通大学出版社,1985.
[2] C.H.勃拉哥维新斯基著,魏东升译.船舶摇摆[M].北京:高等教育出版社,1959.
[3] 金鸿章,姚绪梁. 船舶控制原理[M].哈尔滨:哈尔滨工程大学出版社,2001.
[4] A.H.霍洛季林著,许百春译.船舶的耐波性和在波浪上的稳定措施[M].北京:国防工业出版社,1980.
The Application Effect Analysis of Fin Stabilizer in 100 t Fishery Administration Vessel
ZHU Hang, YOU Gui-biao, SUN Yi-ping, ZHANG Chun-long, ZHANG Xian-yu
(Shanghai Yoyeah Marine Equipment Co., Ltd., Shanghai 201612, China)
100 t fishery administration vessel without stabilizer will shake violently at more than 3 class sea condition, which results in a bad effect to personnel and equipments. This article combines with the actual sea conditions of 100 t fishery administration vessel, contrasts and calculates the rolling motion features of the vessel with stabilizer or not. Taking the vessel with stabilizer as an example, the proper optimized design of stabilizer based on the vessel characteristics are pointed out. The calculation result shows a 60%~80% reduction of the amplitude of roll with suitable fin stabilizer, the living and working environment of sailors are improved, and the rate of attendance is enhanced.
Fishery administration vessel Fin stabizer Gyrostablizer
朱 航(1983-),男,高级工程师。
U
A
