基于传动比计算的行星转向器控制原理分析
2015-05-07李开龙姚金声刘东亚
李开龙, 姚金声, 刘东亚
(中国人民解放军装甲兵学院,安徽蚌埠233050)
0 引言
坦克的转向是依靠两侧履带的速度差来实现的,控制两侧履带的速度差可以通过转向离合器、双变速箱和行星转向器等方法来实现,但目前我军所使用的大部分坦克,如96式坦克还是通过在坦克左右两侧各安装一个行星转向器来控制主动轮的转速,从而达到控制两侧履带的速度差来实现转向的。坦克上的行星转向器除控制坦克转向以外还可以使坦克制动和停车。
1 行星转向器的工作
坦克上的行星转向器由行星传动器、闭锁离合器和制动器(大小制动器)组成,具有直接传动、减速传动和制动3种方式,保证坦克直线行驶、转向和停车。图1是坦克行星转向器的工作原理示意图。其中周转齿轮3是输入构件(齿数76),行星架H是输出构件,它与制动器中的大制动鼓以及闭锁离合器中的外鼓在结构中联成了一体,另外太阳齿轮1(齿数32)与制动器中的小制动鼓以及闭锁离合器中的内鼓在结构中联成了一体。直接传动、减速传动和制动3种方式对应坦克上操纵杆的位置分别是最前位置、第一位置和第二位置。如果坦克上两侧的操纵杆都在最前位置或第一位置时,坦克就直线行驶;如果坦克上一侧的操纵杆在最前位置或第一位置时,另一侧的操纵杆在第一位置或第二位置时,坦克就实现转向;如果坦克上两侧的操纵杆都位于第二位置时,坦克就停车。
机构的自由度为 F=3n-2pL-ph=3×4-2×4-2=2。
因此,行星转向器需要2个输入构件,其工作才是确定的,但坦克上的行星转向器只有一个输入构件3,它是如何实现这3种传动方式的呢?

图1 行星转向器工作原理示意图
2 基于传动比的工作状态分析
2.1 直接传动
直接传动时,行星转向器中的行星架H与太阳齿轮1联为一体,如图2所示。
机构的自由度为 F=3n-2pL-ph=3×3-2×3-2=1。

图2 直接传动时工作原理示意图
机构的运动是确定的。
行星转向器各构件转速关系式为:
式(2)说明当行星转向器中的行星架H与太阳齿轮1联为一体时,输出构件H的转速与输入构件3的转速相同,整个行星转向器相当于一个刚体,实现了直接传动,此时,闭锁离合器中的内鼓与外鼓联成了一体,因此,直接传动时行星转向器中的闭锁离合器必须为闭锁状态。
2.2 减速传动
行星转向器减速传动时,工作原理示意图如图3所示,太阳齿轮1固定。
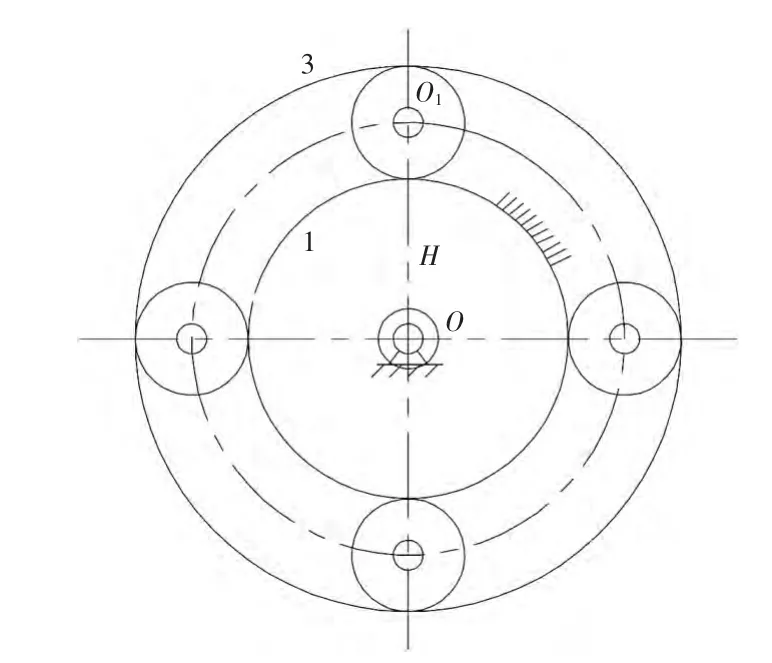
图3 减速传动时工作原理示意图
机构的自由度为 F=3n-2pL-ph=3×3-2×3-2=1。
机构的运动是确定的。
因为 n1=0,代入式(1)得传动比

式(3)说明当行星转动器中的太阳齿轮固定时,输出构件行星架H的转速小于输入构件周转齿轮3的转速,实现了减速传动,此时,由于行星转向器中的行星架H与太阳齿轮3未联为一体,闭锁离合器中的内鼓与外鼓未联成一体,但太阳齿轮固定,即小制动鼓固定,因此行星转向器减速传动时,闭锁离合器为开锁状态,小制动器为制动状态。
2.3 制动
行星转向器制动工作时,工作原理示意图如图4所示,行星架H固定。

图4 制动时工作原理示意图
机构的自由度为 F=3n-2pL-ph=3×3-2×3-2=1。
机构的运动是确定的。
因为 nH=0,代入式(1)得传动比

式(4)说明当行星转向器中的行星架H固定,即输出构件H固定时,整个机构无动力输出,实现了制动,此时,由于行星转向器中的行星架H与太阳齿轮3也未联为一体,闭锁离合器中的内鼓与外鼓未联成一体,但行星架H固定,即大制动鼓固定。因此行星转向器制动时,闭锁离合器为开锁状态,大制动器为制动状态。
3结语
坦克上的行星转向器实现直接传动,闭锁离合器为闭锁状态,大小制动器均为未制动状态;减速传动和制动时,闭锁离合器为开锁状态,只是减速传动时,小制动器为制动状态,大制动器为未制动状态;制动时,小制动器为未制动状态,大制动器为制动状态。
[1] 白海威.ZTZ96式坦克构造与使用[M].北京:解放军出版社,1998.
[2] 孙成立.装甲车辆基础[M].蚌埠:装甲兵学院,2013.
[3] 孙桓.机械原理[M].北京:高等教育出版社,2001.
[4] 杨可桢.机械设计基础[M].北京:高等教育出版社,1999.
