浅谈短波监测车测向性能指标的测试方法
2015-05-07董斐斐
万 峻,董斐斐,陈 良
(国家无线电监测中心成都监测站,成都 611136)
1 引言
移动监测测向车是逼近查找干扰源的重要手段,监测车测向性能对于圆满完成移动监测工作至关重要。监测测向设备通过安装、架设,与车辆融为一体,组成监测测向车系统,其各项性能指标,尤其是测向指标会受到一定的影响。工作中,我们常需要对监测车系统测向性能进行有效地测试,确保监测车测向性能指标达到厂家标称参数,工作状态良好。
根据多次验收、维护短波监测测向车的工作经验,参考国内外标准、规范,并结合无线电监测技术理论研究,笔者粗浅地总结出有关短波监测测向车测向性能指标(地波测向精度、测向灵敏度、测向最小持时间)的测试方法,在此进行介绍。
2 测试条件
2.1 测试环境要求
测试时场地天气应符合被测系统对工作环境的要求:
(1)环境温度:-10℃~45℃。
(2)环境湿度:10%~80%。
(3)大气压强:86kPa~106kPa。
2.2 测试场地要求
(1)地面平坦开阔,远离高压线、河流、厂房、高大障碍物、强辐射源。
(2)场地大小至少需要20λ长、10λ宽(以3MHz为典型值,约需2km长,1km宽)。
2.3 监测测向车状态
(1)测试应在车辆启动时进行。
(2)在测试与角度无关的项目时,应将监测测向车天线标称“N”方向(通常是车头方向)对准信号源系统。
(3)测试前,应将被测系统进行充分预热,并开启测向系统设备自检,验证硬件状态正常。
2.4 测试设备技术指标要求
所使用的测试设备均应取得计量合格证书,并在有效期内。
(1)短波信号源系统具有可编程能力;频率范围(包含HF频段)为3MHz~30MHz;功率可调为-60dBm~6dBm;频率精度为1Hz;频率稳定度为≤1×10-7;天线极化方式与被测系统天线极化方式一致,架设高度与被测系统相当;具有功率放大模块,最大输出功率≥100W。
(2)GPS系统定位精度为1m~3m。
(3)转台位置指示器测量误差≤0.2°。
3 测试方法
3.1 地波测向精度测试
通过测量已知信号源的地波信号,计算移动监测测向系统实际测量示向度与理论示向度之间的角度偏差(均方根值),用以标称系统地波测向准确度。
3.1.1 测试系统结构
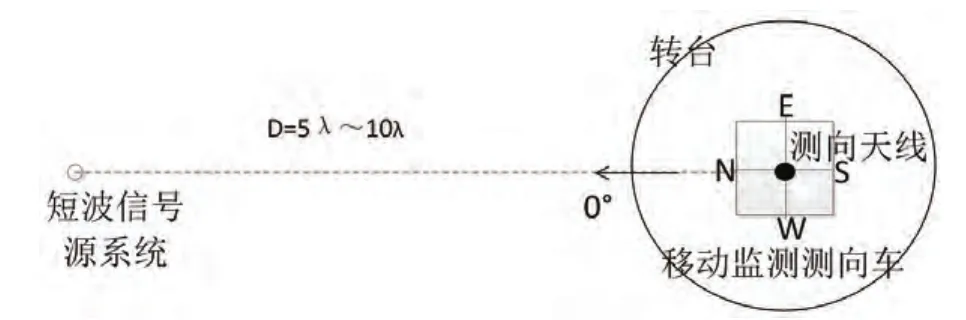
图1 测试系统结构图
3.1.2 测试步骤
(1)按1MHz的频率间隔选取频率f(避开干扰)共27个,形成测试频率列表。
(2)选定信号源架设位置,利用GPS准确测量发射天线经纬度。
(3)将被测系统置于转台上,将测向天线中心与转台中心重合,利用GPS准确测量测向天线中心经纬度。
(4)利用经纬仪观测,将测向天线的“N”方向与转台方位角“0°”调整一致,并对准信号源发射天线方向。
(5)通过2处天线的经纬度,计算出天线之间的距离。
(6)被测系统参数设置建议:自动增益控制AGC为开,设置衰减为0,测向平均时间为1s,测向带宽设置为3kHz,屏蔽电子罗盘功能。
(7)设置信号源发射频率为当前测试频率f,发射输出为标准单载波信号,当被测系统上监测到地波信号的信噪比≥9dB,且示向度稳定时,记录信号频率、时间、示向度θ等数据。
(8)根据测试频率列表改变频率,重复(7),直至所有测试频率测试完毕。
(9)控制转台顺时针旋转15°,重复(7)~(8),直至转台顺时旋转到345°,记录在24个方位角上测得的所有数据。
(10)根据监测数据,计算地波测向均方根偏差:
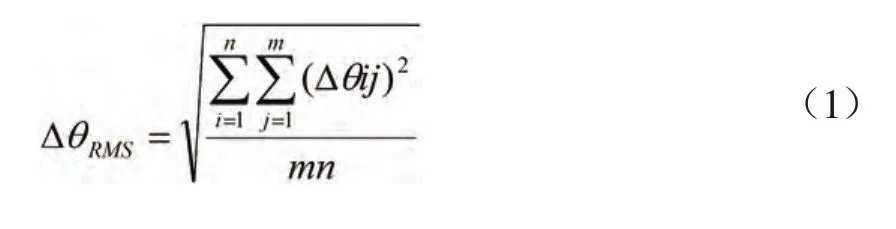
式中,m为转台位置数;n为测量频点数; 为第j个转台位置处第i个测量频点的示向偏差。
3.1.3 测试数据记录及结果

表1 地波测向精度测试数据表
3.2 系统测向灵敏度测试
通过测试已知信号源的地波信号,在给定的方位波动角度条件下,读取移动监测测向系统的场强值,用以标称监测测向车系统整体(包括天线、馈线、测向设备)对小信号稳定测向的能力。
3.2.1 测试系统结构

图2 测试系统结构图
3.2.2 测试步骤
(1)按1MHz的频率间隔选取频率f(避开干扰)共27个,形成测试频率列表。
(2)被测系统参数设置建议:自动增益控制AGC为开,设置衰减为0,测向平均时间为1s,测向带宽设置为1kHz,实时中频带宽为系统提供的最小值。
(3)设置信号源发射频率为当前测试频率f,发射输出为标准单载波信号,调整其输出功率,使被测系统监测到的信噪比≥20dB,测向质量精度≥95%,并且示向度稳定,记录此时的示向度θ。
(4)逐步减小发射系统输出功率,直到示向度90%偏离θ,且方向波动角度达到б时(б一般取±3°),此时被测系统信号场强值即为系统在该频点的测向灵敏度,记录测试数据。
(5)根据测试频率列表改变频率,重复(3)~(4),直至完成所有频率的测试。
3.2.3 测试数据记录及结果

表2 系统测向灵敏度测试数据表
可将表2中的测量数据生成系统监测灵敏度曲线图,形式如图3所示:
图3 系统测向灵敏度曲线图
3.3 系统测向最小持续时间测试
通过测试移动监测测向系统完成准确测向时所需要的信号最短存在时间,用以标称系统对瞬时信号的捕获和测向能力。
3.3.1 测试系统结构(图2)
3.3.2 测试步骤
(1)按5MHz的频率间隔选取频率f(避开干扰)共6个,形成测试频率列表。
(2)被测系统参数设置建议:自动增益控制AGC为开,衰减为0,测向带宽为1kHz,实时中频带宽为系统提供的最小值。
(3)设置信号源发射频率为当前测试频率f,发射输出为标准单载波信号,调整其输出功率,使被测系统监测到的信噪比≥20dB,且示向度稳定(测向质量精度≥95%)。
(4)保持发射功率和频率不变,使用信号源发射脉冲宽度为ι(ι为系统测向最小信号时长标称值的一半),脉冲周期为10ι的脉冲信号,在保持占空比1∶9的情况下逐步增加信号源脉冲宽度,直到被测系统能够准确稳定地给出示向度(测向质量精度≥95%),此时脉冲宽度ι′即为系统在此频率上的测向最小信号时长,记录测试数据。
(5)根据测试频率列表改变频率,重复(3)~(4),直至完成所有频率的测试。
3.3.3 测试数据记录及结果
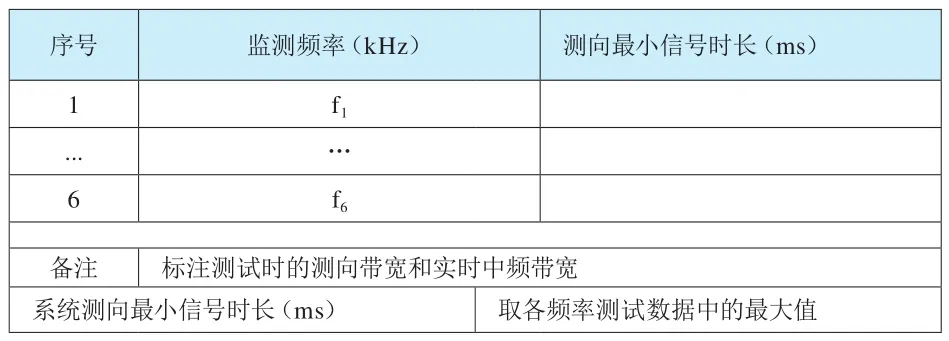
表3 系统测向最小信号时长测试数据表
4 结束语
本文介绍了短波监测测向车测向性能指标的测试方法,可作为监测车改装验收、维护检查、定期校准的技术参考。
[1] 张洪顺,王磊.无线电监测与测向定位[M].西安:西安电子科技大学出版社,2011
[2] ITU-R SM.2125-1建议书.高频/甚高频/特高频监测接收机和电台的参数和测量程序
[3] ITU-R SM.377-4 建议书.国际监测站频率测量的精确度
[4] 朱庆厚.接收机无互调和无虚假响应动态范围.中国无线电,2008.11
