基于霍尔效应的惯性测振实验的研究与应用设计
2015-05-07徐雅惠李欣蔚邓加军
徐雅惠,周 林,李欣蔚,邓加军
(华北电力大学a.电气与电子工程学院;b.数理学院,北京102206)

霍尔效应在物理量的测量和工程实践中应用广泛,可以直接或间接地测量磁场.在大学物理实验中,利用霍尔效应对螺线管内的磁场进行测量,在此基础上对该实验进行研究拓展,利用霍尔效应实现振动测量.如何对大型机械设备工作时的微振动进行测量是目前许多前沿科学亟待解决的问题和重要的研究方向.针对目前机械设备振动测量和评价方法存在的问题,开展对微振动测量方法的深入研究、制定评价标准或校准规范,具有十分重要的现实意义和应用价值,其成果可为大型机械设备的维护提供准确有效的技术依据[1-2].当前常用的传感器主要有电阻式传感器、电容式传感器、压电式传感器和磁电式传感器,这几类传感器分别在温度影响、灵敏度、工艺造价、结构、响应能力等方面存在缺陷[3].而霍尔式传感器装置结构简单,体积小,重量轻,其中霍尔元件频带宽,动态特性好且价格低廉.由于以上诸多优点,其在材料探伤、机械系统的故障诊断、噪声消除、结构件的动态特性分析及振动的有限元计算结果验证等方面都有很好的应用前景[4].本文介绍了基于霍尔效应的惯性式振动传感器,首先通过理论推导设计所需的磁场区,并通过实验验证其中磁场与位移的线性关系,在此基础上设计了霍尔振动传感器,并对其进行应用实验,通过数据对比证明了其可行性.
1 理论基础
1.1 霍尔效应基本原理
如图1所示,在半导体薄片两端通以控制电流I,并在薄片的垂直方向施加磁感应强度为的B匀强磁场,则在垂直于电流和磁场的方向上,将产生电势差为UH的霍尔电压.这一现象被称为霍尔效应.霍尔电压的大小UH可通过下式计算:

式中,RH为霍尔系数(与半导体材质有关),I为霍尔元件的偏置电流,B为磁感应强度,d为半导体材料的厚度,KH为霍尔元件灵敏度.
1.2 线性磁场
由式(1)可知若保持霍尔元件的工作电流I不变,则霍尔电压UH与磁感应强度B呈线性关系,因而如果令霍尔元件在线性均匀梯度的磁场中移动,必然会产生同样线性均匀变化的霍尔电压,输出的霍尔电压UH值只由它在该磁场中的位移量x来决定[5].若磁场中的磁感应强度在一定范围内沿x方向的梯度变化dB/dx为常量,则当霍尔元件沿x方向移动时,霍尔电压UH的变化为:


图1 霍尔效应示意图
式中K为位移传感器输出灵敏度.将(2)式积分后得

(3)式说明,霍尔电压与霍尔元件在磁场中的位移量成线性关系.磁场梯度越大,灵敏度越高;磁场梯度越均匀,输出线型度越好.
1.3 惯性式测振传感器
根据测试参考坐标不同,测振传感器可分为:相对式测振传感器和绝对式测振传感器两类.前者用于测量振动体相对其振动参照点的运动,后者用于测量振动体相对于大地或惯性空间的运动.绝对式测振传感器因为内部包含惯性质量块,故又称为惯性式测振传感器.一般惯性式测振传感器的示意图如图2所示.其中,x表示被测振动体及振动系统外壳的位移,称为绝对位移;y表示质量块相对于振动系统外壳的位移,称为相对位移,两者之间的关系可用二阶常系数线性微分方程描述:

式中,wn为固有角频率,为阻尼系数
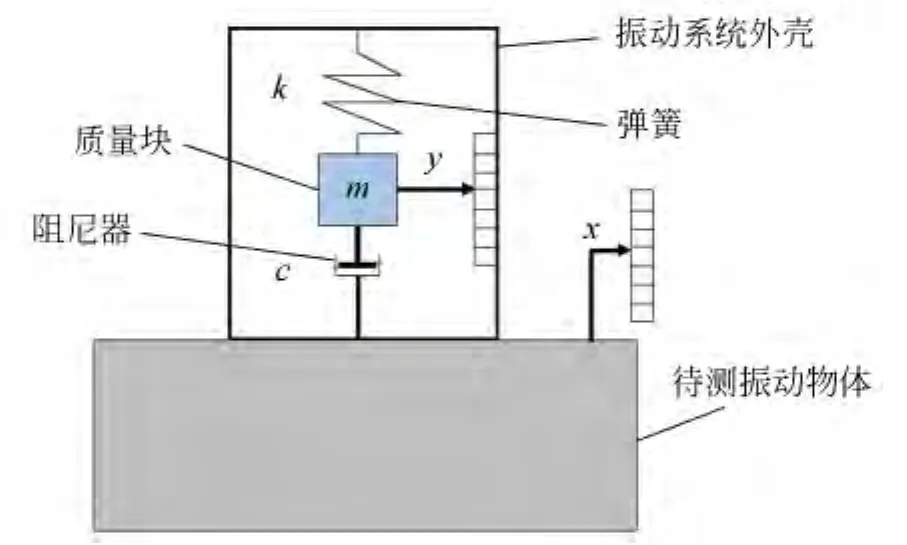
图2 振动系统原理
对(4)式利用Laplace变换可推导得出y与x的关系:
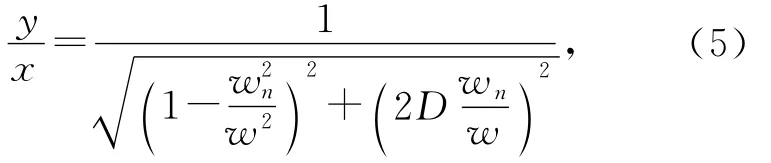
其中w为待测振动物体的振动频率,当w≫wn时,y=x.
由(5)式可实现相对位移y向绝对位移x的转化,即可求得绝对运动位移[6].
2 实验研究
2.1 霍尔元件的选择
SS495系列传感器的输出与电源电压成比率变化关系,并与磁场强度成正比.通过参量比较,实验最终选定型号为SS495A的霍尔元件,其相关参量如下:控制电压5V,输出电压范围>0.4V,灵敏度(3.125±0.125)mV/G,磁场范围-670~+670G,工作温度范围-40~+150℃.由以上参量可知,此型号的霍尔元件对控制电压要求低,电压输出灵敏度高,能够满足一般的微震动测量要求,且其工作温度范围宽,可适应多种温度环境下的测振工作.
2.2 线性磁场的选择及其线性范围的确定
根据理论为了找到满足磁感应强度变化梯度为常数的磁场,尝试用不同的磁场进行实验,通过理论推导和实验验证,最终确定对条形磁铁进行改进,将2个直角结构的铁块固定在条形磁铁两端,铁块两端间隙的磁场即为符合要求的磁场,结构如图3所示.
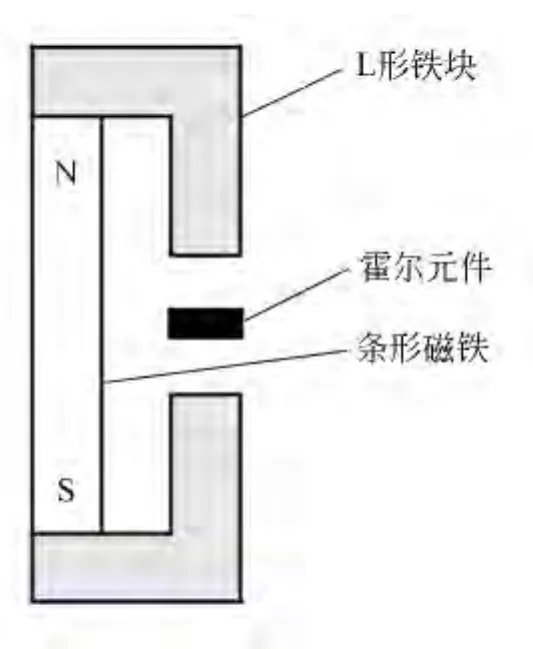
图3 线性磁场设计图
由于模型的尺寸问题,磁场线性区域的具体范围以及线性关系是不确定的,下面将通过实验的方法来探索.实验中,为了准确把握霍尔元件在磁场中的位移,实验时将霍尔元件引脚和接线固定在游标卡尺的下量爪上,同时将霍尔元件放置在磁场中,改变下量爪的位置,从游标卡尺上读取位移,每次移动0.5mm,然后读出电压表显示的霍尔电压值,实验数据记录如表1所示.
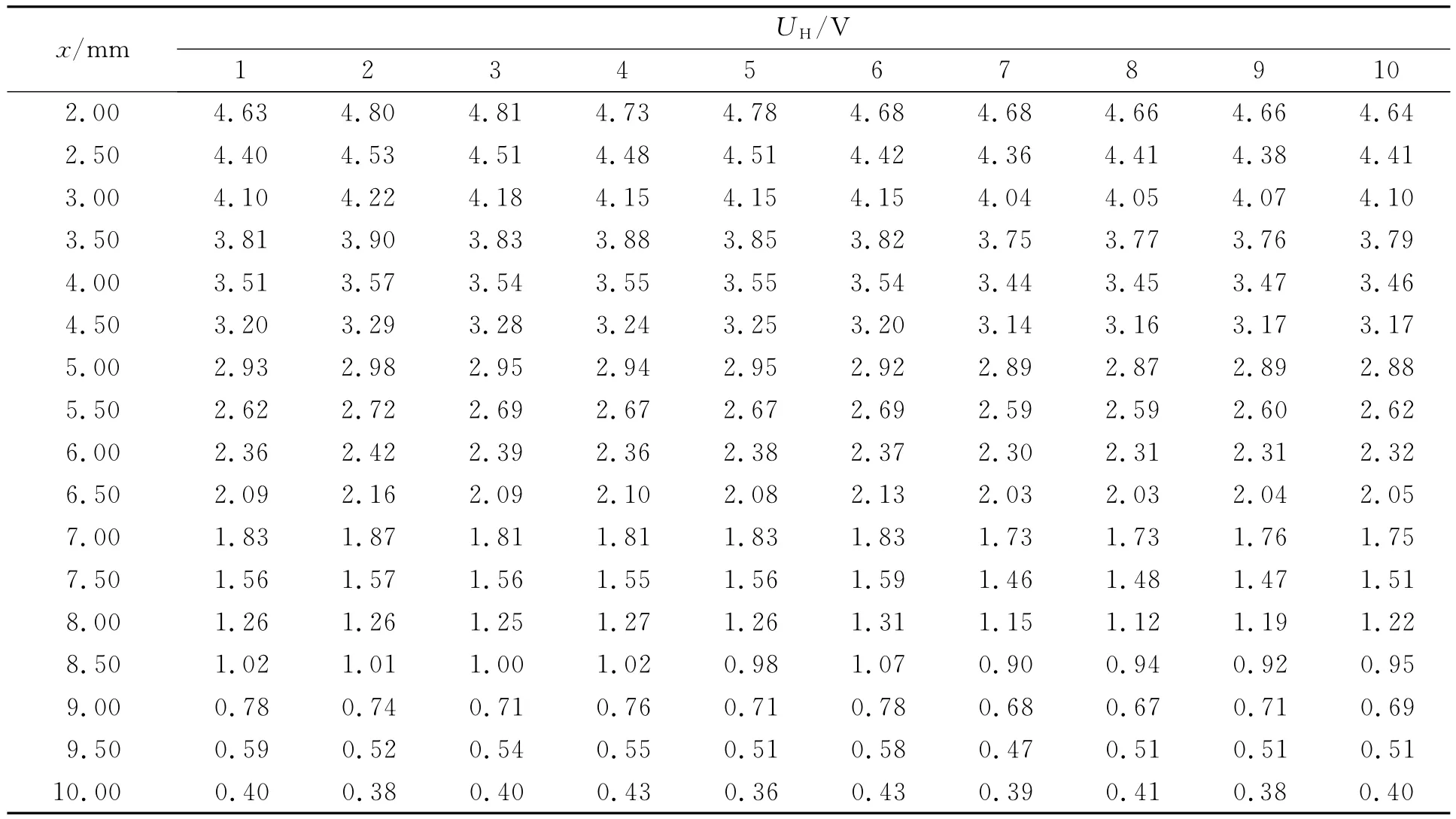
表1 霍尔电压测量值
为准确确定UH与x之间的函数关系,运用Matlab将测量数据以位移作为自变量x,将12组霍尔电压数据取平均后作为因变量,拟合线性多项式.实际值与拟合曲线对比如图4所示.根据拟合结果得到函数表达式为UH=-0.5553x+5.7370,拟合确定系数R为0.9973,表明拟合效果良好,可见UH和x线性关系较强.

图4 函数拟合图像
确定了UH和x的关系,实际振动测量中只需要记录一定时间内输出的霍尔电压最大值与最小值,得到最大差值ΔUH(V),则霍尔元件在线性磁场中的相对位移
3 振动传感器的设计与测振应用
在实验研究的基础上得到了基本磁场模型,接下来完成对惯性测振传感器的设计,最后对其进行了测振应用实验,证明测振装置的可行性.
3.1 基于霍尔效应的惯性测振传感器的设计
基于霍尔效应的惯性振动传感器示意图如图5所示.图5中2个L形铁块分别与条形磁铁两端对称固定形成组合磁铁(质量为m),组合磁铁与传感器外壳之间通过阻尼器支承,霍尔元件位于2个L形铁块之间的间隙中,霍尔元件水平放置并与塑料外壳相固定.作为另一种优选的实施方式,所述弹簧为低刚性弹簧.
霍尔元件后面的引线用于给霍尔元件提供工作电源,同时由振动参量转化得到的霍尔电压也通过引线输出.在工作时,将该传感器的外壳刚性地固定于被测振动物体上,使被测振物体的主要振动方向与磁铁的振动方向相同.当被测物体振动时,外壳和霍尔元件随其一起振动,由于弹簧和阻尼器的作用,磁铁产生相对位移.由此霍尔元件在磁场中产生位置变化,从而改变霍尔元件输出的电压.由于在组合磁铁产生的磁场中,霍尔元件的相对位移和输出电压呈线性关系,进而完成了被测物体振动位移情况向霍尔元件输出电压的转换过程.在具体装置设计中,对于实验装置各组成部分,通过设计实验测得相关参量如下:

图5 霍尔惯性测振传感器
将惯性测振原理的位移公式与线性磁场的霍尔电压公式相结合最终可推导得出被测振动物体的绝对振幅A与霍尔电压最大差值ΔUH的关系式为

考虑到一般的微振动仪器或设备的振动频率很大,远远大于此测振系统的固有频率,所以可以认为
实验中将霍尔元件的输出信号采用运算放大器加以放大,通过A/D转换信号,再利用单片机来处理输出的电压信号,通过设计程序进行数据取样,输出在足够短的时间间隔内(可近似为时间点)电压的最大值和最小值之差以及经转换得到的被测物体振幅,同时将放大器与示波器相连,显示出振动波形.测振系统原理图如图6所示.实验还设计了报警电路,一旦测得的振动幅值超过限定范围,报警指示灯亮[7].
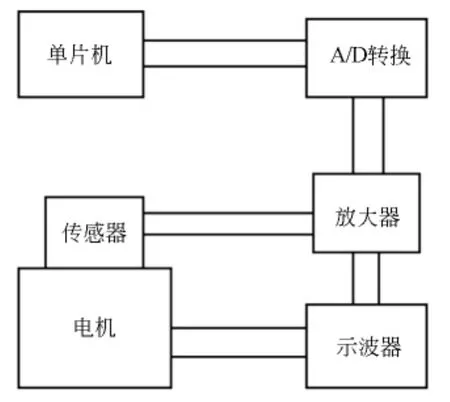
图6 测振系统原理图
3.2 测试应用与数据分析
为了测试上述测振传感器的实施效果,以直流电动机为振动源,分别对其在不同转速下的运行情况监测10min(实际测试装置如图7所示),记录测得的最大振幅并与ISO/DIS79110-2《旋转机器轴振动的测量与评定》中规定的电动机振幅限值进行对比,如表2所示.

图7 直流电动机振动监测装置图

表2 直流电动机振动监测
同时实验中还利用示波器对电机的振动情况进行了观测,选取当电机转速为1 500r/min的振动波形记录如图8所示,图中上下2条直线为标定的振动允许值,可见电机在此运行状况下振动情况稳定,基本未超出限定范围.
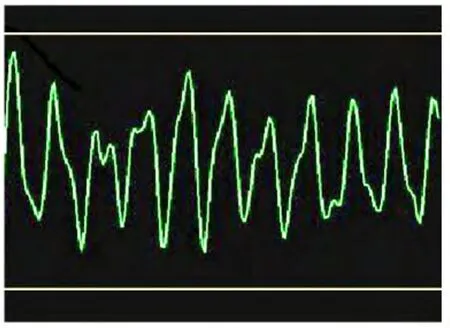
图8 直流电动机振动监测波形图
3.3 结构优势与精度分析
对比目前常用的几类传感器可知,电阻式传感器受温度影响较大(有时需进行温度补偿)、灵敏度低、工艺较复杂且造价通常比较高;电容式传感器输出阻抗高、负载能力差、传感器体积大、结构复杂、对加工工艺要求高;压电式传感器输出的直流响应差,需要采用高输入阻抗电路或电荷放大器来克服这一缺陷,而且某些压电材料价格较高且需要防潮措施;磁电式传感器频响低、体积大[6].
分析可知,本实验研究设计的振动传感器在结构上相比传统的振动传感器有较大优势.目前的测振技术主要采用相对式测振仪,但相对式测振仪具有明显的缺陷,例如当需要测量绝对振动,但又找不到绝对静止的参考点时,这类仪器就无用武之地.本文中的振动传感器利用惯性式机械测振法,将霍尔效应应用于对微振动的获取方面,即将传感器外壳与受测振动物体的测点直接固定,当传感器外壳随被测振动物体运动时,由于组合磁铁的质量较大、弹簧较软以及阻尼器的作用,对于足够高的振动频率,组合磁铁因惯性来不及随振动物体一起振动而接近于静止,在惯性作用下,由弹簧和阻尼器支承的磁铁块与固定至传感器外壳的霍尔元件之间将会发生相对运动,从而引起输出霍尔电压的变化,完成由振动参量到电压信号的转换.
同时,该传感器采用霍尔元件,霍尔元件结构牢固、体积小、重量轻、寿命长、安装方便、功耗小、频率高(可达1MHz)、耐震动、不怕灰尘油污水汽及盐雾等的污染或腐蚀,而且精度高、线性度好,其工作温度范围宽,可达-40℃~150℃,使该振动传感器具有较高的稳定性,可适用于外界温度变化较大的场所,其对温度的误差可缩小为±0.04%/℃,而且比其他需要外加电源的传感器所需要的功耗小.传感器外壳的外层为铁磁材料层,可以有效屏蔽外界的磁场对霍尔元件的干扰.由于外壳铁磁材料层屏蔽的作用,以及霍尔元件所处工作磁场相对较强,不容易受电机或变频器等外界磁场的干扰.
霍尔传感器将有较好性能的霍尔元件与线性度很高的磁场结合,可以达到很高的测振精度.通过实验测定结果可知,其对于被测物体振动幅值信息的获取可达到0.1μm的精确度,能够实现对于振动幅度较小的设备或仪器振动情况的实时监测.
4 结束语
本文是对大学物理实验中利用霍尔效应测量磁场内容进行的拓展研究与应用实践.根据以上对霍尔效应测量磁场实验的分析,研究得到具有线性特性的磁场,并且设计了对该磁场中线性关系测定的探究性实验,又在此基础上设计出基于霍尔效应的惯性式振动传感器,该传感器装置结构简单、体积小、动态特性好且价格低廉.通过对实际测振应用实验结果的分析可知,该传感器具有较高的测量精度,并且可以根据实际需要应用于不同环境,可广泛应用于各种机械设备的振动测量,满足实用性.
[1]于梅.精密仪器环境振动测量和评价方法的研究[J].振动与冲击,2010,29(8):214-216,253.
[2]张立辉,张攀,乐宏昊.利用双霍尔探头测螺线管中低频交变磁场[J].物理实验,2014,34(7):30-32.
[3]唐丽红,赖永宽,卢杰发,等.利用激光反射法探测微小振动[J].物理实验,2013,33(9):6-9.
[4]张涛.物体微小振动光学干涉测量方法的研究[D].北京:北京交通大学,2010.
[5]李浩杰,邓智泉,廖启新,等.适用于无轴承薄片电机的低成本霍尔近距离位移传感器[J].电子机械工程,2007(6):60-64.
[6]孙传友,阳成军,周月霞.惯性式测振传感器的设计思路和方法[J].传感器世界,2002,8(8):7-10.
[7]王辉林.发动机振动传感器的设计研究[D].大连:大连理工大学,2003.
