煤矿救灾机器人防爆视觉系统设计与分析
2015-05-07孙辉辉张伟杰
孙辉辉,丁 军,张伟杰
(华北科技学院机电工程学院, 北京东燕郊 101601)
0 引言
救灾机器人是机器人的一个新兴发展领域,属于危险作业机器人的一个分支,具有其危险作业机器人的特点[1]。在灾难发生后,救援人员很难在短时间内对遇难者进行搜救,耽误了生命救援的最佳时机。在这种紧急而危险的环境下,救灾机器人可以为救援人员提供帮助[2-3]。因此,将具有自主智能视觉系统的救灾机器人用于危险和复杂地灾难环境下“搜索和营救”幸存者,是机器人学中的一个新兴而富有挑战性的领域[4-5]。
但是,针对煤矿救灾机器人,由于灾难现场环境十将更加的恶劣。首先,煤矿井下无线通信困难,巷道煤壁对信号吸收严重,而且巷道转弯多,无线电波难以穿透煤层和岩层[6-7];其次,煤矿井下导航困难,没有GPS定位导航信号,这样就使得现有一些定位技术不能适用于或者不能直接用于矿井救灾机器人。其次,煤矿爆炸事故一旦发生,矿井下的爆炸性气体、粉尘浓度依然很大,煤矿就在机器人视觉系统在转动时产生的电火花随时有可能引发再爆炸的可能,对救护队员的生命安全造成极大的威胁[8-9]。因此对救灾机器人视觉系统的防爆设计将是系统设计的一个重要部分。
1 视觉系统建立
煤矿救援机器人全方位视觉系统是为煤矿救援机器人提供全方位视觉信号的设备,是典型的机电一体化系统,为煤矿救灾机器人上具有很重要的设备。目前,研究机构研制的煤矿救援机器人有多种多样。基本由机器人本体、驱动器、传感器和控制系统组成。如图1所示。机器人本体是承载视觉系统的一个机器人平台,可以在救灾工作面水平移动。全方位视觉系统机械机构提供一个多自由度的旋转平台,用于装视觉传感器。驱动器用来驱动步进电机旋转,带动视觉系统水平轴和垂直轴转动。视觉传感器是图像传感的一个重要部分,负责将采集的图像送到上位机。控制系统为整个系统的中心控制部分。

图1 视觉系统功能结构图
救灾机器人视觉系统机械机构性能是测量系统一个重要指标,它由测量系统的机械结构决定,并直接影响到测量系统的机动性。在煤矿救援机器人上使用的测量系统的功能是将测距仪对准需要观察的方向,以便获得观察视野。所以需要五个自由度,绕X轴和Y轴的转动和XYZ三个方向的水平移动。XYZ方向水平移动由机器人本来完成,绕X轴和Y轴的转动为视觉系统的机械部分完成。以此作为视觉系统机构设计的依据设计出救灾机器人视觉系统的结构图如图2所示。

图2 视觉系统机械结构
2 防爆设计
视觉系统建立完成后,将安装与救灾机器人前方用于视觉的探视。但煤层地质条件差,高瓦斯矿井多,煤矿各种各样的易燃易爆性气体、粉尘经常会泄露或溢散在煤炭生产、加工、运输和贮存的各个过程。这些易燃气体与空气混合后,就会形成爆炸性混合物。当混合气体达到爆炸浓度时,如果碰到火源,就会产生爆炸和火灾等严重事故。所以在煤矿使用的机电设备必须符合煤矿机电防爆要求。为了使煤矿救援机器人视觉系统符合防爆要求,要对视觉系统进行防爆设计。
防爆设计是在视觉系统的外部安装一组可以完全包围的金属防爆壳体,如图3和图4所示。视觉系统的防爆壳体分为两个部分:顶部壳体和轴部壳体。防爆壳体一方面是为了保护设备不受损害,另一方面是当视觉系统的电气设备产生电火花,并且引气金属壳体内部发生爆炸时,防爆壳体可以起到熄火作用,并且对高温气体产生降温的作用。
2.1 间隙的熄火作用

图3 垂直轴防爆壳体

图4 顶部防爆壳体
爆炸性气体混合物火焰存狭小间隙中熄灭的理论是建立在管道中火焰传播界限的实验研究基础上的。对于不同的爆炸性气体混合物,都有对应的临界熄火直径值DL。当管道的直径超过临界值时,这种爆炸性气体混合物的火焰即可沿着这个管道传播,否则火焰熄灭。管道中心火焰温度最高为Tmax,沿火焰表面的温度为Tmin,即气体燃烧所需最低温度。在火焰外一定距离到管壁之间气体的温度为Tn,Tn<Tmin,所以这个区域的气体不燃烧,这是因为反应产生的热量被管壁及未燃气体吸收所致。随着火焰的传播,火焰前力的气体相继开始燃烧,而靠近管壁的区域气体因为温度较低始终不燃烧。若管子的直径再减小一点时,火焰的传播就不可能了,这个直径即称为:临界直径DL

式中,α为气体混合物热扩散率,v表示火焰波传播速度,e为瓦斯气体的活化能,δ代表传播常数。
2.2 间隙的冷却作用
当临界问隙大于接合间隙时,壳内的爆炸火焰通过间隙就被熄灭,但是穿出间隙的爆炸产物的温度达到外部爆炸性气体混合物的燃点时,仍然能够引起外壳周围的爆炸性气体混合物爆炸。
燃爆炸性混合物的必要条件是在有限的燃烧生成物中有足够的能量。当法兰间隙足够长,火焰通过其中时,由于间隙的冷却作用,穿过间隙的火焰得到充分的冷却,其温度降低到外壳外部的爆炸性混合物所需要的燃点以下,所以不会传爆。试验表明,从外壳喷出的爆炸产物温度高于燃点以上温度时才能点燃瓦斯气体。可燃性气体通过间隙时的冷却程度可利用热损失ΔQ与爆炸时产生的热量Q0之比ΔQ/Q0来衡量。以结合面圆周上的一段圆弧d1作为单位长度。爆炸生成物从接合面单位长度上喷出的数量为:

式中;VH是外壳的净容积,L代表法兰接合面周长,dl代表法兰接合面单元长度。
在以下的试验中令部采用浓度为85%的沼气—空气混合物。沼气的燃烧值为892.6 kJ/mol,所以容积为VH的沼气与空气混合物完全燃烧放出的热量为:

式中,ξ代表的是瓦斯的浓度,q代表瓦斯气体的燃烧值,M代表摩尔质量。
当高温气体气流通过壳体法兰接合面间隙时,由于法兰的热传导作用,气体产生的热损失可以表示为:

式中,C为气体的定压比热容;T1为外壳内气体进入间隙时的平均温度;T2为气体出口时的平均温度。
根据公式:由式(3)和(4)可得:
3 视觉系统的防爆数值分析
视觉系统的防爆主要涉及间隙熄火和间隙冷却两个方面,根据理论计算,查阅资料并且选择合适的参数,对防爆壳体的临街间隙进行计算。由于壳体法兰面为平面联接,取公式(2)临界直径的1/2作为法兰联接面的临界间隙。得出临界间隙为0.63 mm。参数选择如表1所示。

表1 临界间隙计算参数
为了验算防爆壳体的间隙冷却作用,采用浓度为85%的甲烷-空气混合物进行实验。针对不同的壳体间隙,0.2 mm,0.3 mm,0.5 mm,1.5 mm,得到法兰冷却壳体的冷却作用如表2所示。

表2 爆炸后壳内外的温度与热损失的关系
通过以上分析计算可以看出:随着间隙的加大,热损失降低,隔爆外壳间隙处的出口温度增加,防爆壳体逐渐失去隔爆冷却作用。
4 隔爆壳体有限元分析
根据爆炸性气体环境用电气设备国家标准的要求,隔爆型外壳需要进行外壳耐压试验。可以使用有限元软件模拟外壳耐压试验,验证设计的正确性,同时为外壳改进提供理论依据。隔爆壳体的必须承受最少5 MPa均布压力,并保持30 s以上,分析类型可以按静力学分析。定义相关参数,然后利用ANSYS软件进行计算,得到的结果为:
在有限元分析过程中,网格划分大小为4 mm,材料选择合金铝,弹性模量为 70 GPa,剪切模量为26 GPa,然后进行计算,结果如图5所示。
如图5过应力分布图所示,隔爆壳体各部分的受力都清楚的表示出来。隔爆壳体最薄弱的部位在壳体的顶部,应力为55 MPa左右,小于材料的许用应力220 MPa,满足防爆的强度要求。法兰连接的应力分布,从图中可以看出最大应力为167.51 MPa,也远小于材料的许用应力220 MPa。满足防爆的强度要求。

图5 顶部隔爆壳应力分布图
在水平轴壳的有限元划分时,网格的划分和材料选择和顶部轴壳相同,设置好基本参数后,进行仿真计算,得到结果如图6所示。通过图6水平轴壳应力分布图可以看出,隔爆壳体最薄弱的部位在壳体的中间部分,应力为31.22 MPa左右,局部应力的最大值为40.05 MPa左右,远小于材料的许用应力220 MPa,满足防爆的强度要求。在有限元分析基础上,此防爆壳体的数据还需要进步做其它试验进一步验证。
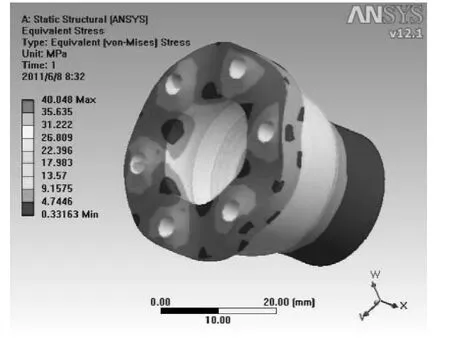
图6 水平轴壳应力分布图
5 结论
本文以煤矿救灾机器人全方位防爆视觉系统为研究目标,建立了全方位视觉系统的物理结构,分析了适用于全方位视觉系统的间隙隔爆原理和间隙熄火原理形式,并以此为依据对视觉系统进行了隔爆结构设计。最后,利用有限元仿真软件,模拟爆炸过程所产生的压力,验证隔爆壳体等关键部位的防爆性能。结果表明全方位视觉系统的防爆结构合理,性能满足设计要求,为防爆壳体的进一步研究提供理论基础。
[1] Li Y W,Ge S R,Zhu H.Explosion-Proof Design for Coal Mine RescueRobots[J].Advanced Materials Research,2011:211-212.
[2] 李允旺,葛世荣,朱华,等.煤矿救灾机器人隔爆壳体的设计与加工[J]. 煤矿机械,2009:104-106
[3] 朱晓飞.煤矿救灾机器人的惯性/视觉组合导航方法研究[J]. 矿山机械,2010,4:12-14.
[4] Niu S G,Wang X L,Jiang X M,et al.New Structural Design of Coal Mine Rescue Robot[J].Mechanical Engineering Materials Science& Civil Engineering II,2013,470:650-653.
[5] Yunwang LI,Shirong GE,Zhu H,et al.Mobile platform of rocker- type coal mine rescue robot[J].Mining Science &Technology,2010,20:466 –471.
[6] Junyao G,Xueshan G,Wei Z,et al.Coal Mine Detect and Rescue Robot Design and Research[C]//Networking,Sensing and Control,2008.ICNSC 2008.IEEE International Conference on.IEEE,2008:780-785.
[7] Retallack G J,Morante V R.Global coal gap between Permian- -Triassic extinction and Middle Triassic recovery of peatforming plants[J].Geological Society of America Bulletin,1996,108(2):195-207.
[8] Liu J.Coal Mine Rescue Robot Suspension Mechanism Modeling and SimulationExperiment[J].Journal of Shandong University of Science& Technology,2014.
[9] Pan F W.Parallel Structure Based Mine Rescue Robot DynamicsAnalysis[J].Coal Mine Machinery,2014.
