船舶水下外形实时自动测量系统研究与应用
2015-05-06陈明辉
陈明辉
(京杭运河江苏省交通运输厅苏北航务管理处,江苏淮安223002)
0 引言
我国京杭大运河苏北段全长404 km流域内建有28座大型船闸,这些船闸每天承担着数以百计的船只通行任务。面对如此巨大的工作量,实现高效、自动、快速的过闸船舶外形自动化测量技术来代替原有的人工测量方式,为工作人员实时地提供船舶的长度、宽度、吃水深度以及干舷高度等数据,从而提高船闸的服务效率和保障船闸运行安全,对我国水路运输事业的发展具有重大意义。
对于水上航行的船舶,由于测量条件的不同,水下部分外形的量测与水上部分外形的量测在手段和方法上有所不同,难度更大。此外,经检索和查新没有发现国外有关船舶水下部分外形测量系统的正式文献和报道,无法借鉴和参考国外的有关资料。本文将介绍1套利用多波束与单波束技术相结合,从而得到船舶水下部分外形的测量系统。
1 基于水声测距测量水下点位位置的原理
水声测深仪换能器向待测点所在位置发射某一频率的声波信号,声波在水中以1 500 m/s左右的速度传播。当声波到达该点时,部分声波的能量反射回来。当反射声波到达换能器表面时,换能器将声波信号转换成电波信号,通过信号放大和数据处理,将信号转换为待测点到换能器之间的直线距离。根据换能器的指向性可确定该点的坐标。
水声测深仪的声波发射端为一宽波束角(大于60°)换能器,接收端为一窄波束角换能器,仅接收波束角内的回波,可近似为垂直于接收换能器面的中心线。声学测距原理图如图1所示。
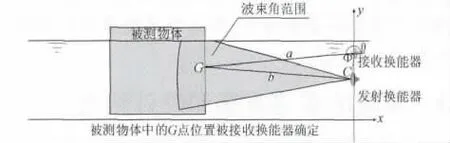
图1 声学测距原理图
发射换能器在其波束角范围内“照亮”被测物体,其中声波沿线b传播到被测物体,经G点的反射沿线a方向(垂直于接收换能器面的中心线)传播到接收换能器。可测得声波经发射换能器到G点与被其反射到接收换能器的声波传播时间t有以下关系:

式中:v为声波在水中传播速度。
由换能器的安装位置可测得发射、接收换能器之间的距离c,以及夹角Φ,根据三角形几何关系有以下方程:

解算出:

相对于图1定义的坐标系,θ为换能器与水平方向夹角,最终得到G(x,y)点坐标位置:

式中:x1、y1为换能器1的坐标位置。
如布置更多接收换能器,可得到被测物体外部形状不同点的位置:

2 系统的设计思想和研究思路
水声测深仪主要有单波束测深仪和多波束测深仪。目前商用的单波束测量系统和多波束测量系统主要是针对水下测深或水下地形测量,无法直接应用测量船舶水下部分。单波束系统在船形测量中主要问题是测量速度慢,对运动中的船舶进行截面外形测量时,无法获得足够多的采样点;多波束系统的测量范围无法覆盖船舶水下部分,并且价格昂贵,将大大增加仪器成本。因此,为了同时测量船底和船侧面外形数据,并且考虑到测量系统的安装不能影响船舶的通行,船舶运动对测量精度产生的影响以及仪器的成本等问题,单波束系统和多波束系统并不适用于单独对船舶水下部分进行测量。
经过多次实验,研究人员最终决定采用单波束、多波束综合测量系统。单波束系统主要测量船舶底部外形及船舶吃水深度,多波束系统测量船舶侧面外形及水下宽度。
3 系统的实施方案和硬件组成
3.1 单波束测量系统
单波束传感器阵在河道测量断面一字排开,间距2 m,共布设6套,垂直向上测量通过船只的底部,采用循环扫描的测量方式。由于传感器数量少,测得船舶断面的边界不确定性可忽略。
船舶的底部外形一般比较平坦,因此对于船舶的底部外形测量,可以通过测量到的几点关键数据来近似推算出整个船底外形。船舶底部外形测量点位置按以下公式确定:

式中:Xn为换能器在测量截面的X方向坐标;Yn为换能器到船舶的测量距离。
3.2 多波束测量系统
船舶水下侧面外形采用多波束测量方式。多波束测量阵由1只宽波束发射换能器和12只接收换能器组成。根据水下声纳多波束测量的结果,完成对船舶侧面的外形测量。
3.3 船舶水下外形测量系统的硬件组成
测量系统由多波束测量系统及单波束测量系统组成,其硬件主要有:1台多波束主控制器、1套PXI板卡机箱、1套信号发生器、2套8通道信号处理板卡、1套I/O控制器、1套功率放大器、1套宽波束高功率发射换能器、12套接收换能器、1套电气机柜、1套多波束换能器安装支架、1套姿态仪、1套高压水系统、1套单波束控制器、1套单波束信号转换控制器、7套单波束收发换能器。
4 船舶水下外形测量系统的误差分析
4.1 多波束测量系统的误差分析
(1)接收换能器的波束角(指向性)带来的测量误差
在本系统内接收换能器的波束角为3°。在接收换能器的波束角内的较强发射被记录为波束角中心线方向的测量距离a。
据现场换能器阵安装的相对位置,Φ为90°。由于波束角为3°,a值实际长度在如下范围内:

式中:c为接收换能器到发射换能器的距离。
a的最大误差约为15 mm。
(2)时间采样带来的测量误差
本装置信号采集器测时精度为10-6s,按声速1 500 m/s计算,带来的测量误差为0.15 mm;软件计算带来误差约为15 mm,声速可按声速计测得,系统总体误差可控制在30 mm内。
4.2 单波束测量系统的误差分析
本系统采用美国FFT测深仪作为船舶吃水深度的测量仪器,其测量精度为70 mm。
在本方案中采用测深仪垂直向上测量来确定船舶吃水深度及船底外形,因此,换能器的安装精度直接影响系统测量精度。
换能器事先固定在水泥基础上,由水准仪检测其安装水平度,确保6只换能器在同一水平线上。
水泥基础上安装姿态传感器,在安放横梁过程中实时监测横梁姿态。本次安装横梁的左右横滚角度为0.635°,前后俯仰角为0.237°,安装带来的测量误差为6 mm。单波束测量精度为70 mm。该装置总体测量误差小于80 mm。
5 系统的实验验证
根据图1及式(6)、式(7)可知,各点位的精度取决于所测得的反射点G到接收换能器之间的距离值a的精度。为了验证船舶水下部分外形测量系统的可行性,项目组就系统对该距离值的测量进行了实验。
5.1 实验过程
项目组在京杭运河淮安2号船闸处进行了实验。本次实验采用的是NI-PXI综合测试仪。通过测量发射换能器及接收换能器的实时信号数据,记录发射声波及回波的波形,得到测量波形1~波形10。本文以波形10、波形4进行分析。波形10、波形4测量到对岸距离分别如图2、图3所示。
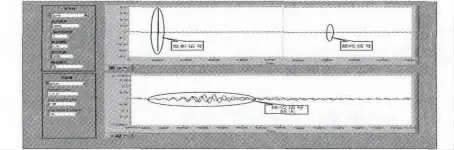
图2 波形10测量到对岸距离
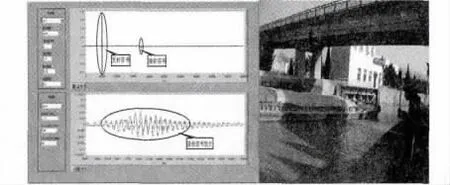
图3 波形4测量到船舶距离
5.2 实验结果
根据实验数据波形10,换能器回波信号有两种不同的信号。实验中,两接收换能器同步接收到回波信号。因安装位置及发射角度关系,二者存在相位差,证明多波束测量技术方案是可行的。
记录发射及接收换能器的波峰时刻,计算出时间差、声波传播距离及接收端到被测物体的距离。波形10发射信号、接收信号处理分别如图4、图5所示。
根据波形10实验数据,推算出接收端到对面河岸的距离约为30 m,与实际尺寸大致相等。
波形4发射信号、接收信号处理分别如图6、图7所示。
波形4在船舶通过时测量到船舶距离约为12.5 m,根据实验波形图可见船舶的运动未对测量系统带来大的影响,可清晰区分出回波信号。
6 结语
本文介绍了一种实时自动的船舶水下部分形状测量系统,该系统基于单波束与多波束测距技术,可得到船舶水下部分的外形、宽度以及吃水深度。船舶水下部分形状测量系统通过试验验证,该系统稳定性较好,精度较高。
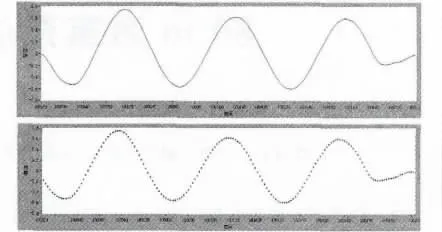
图4 波形10发射信号处理
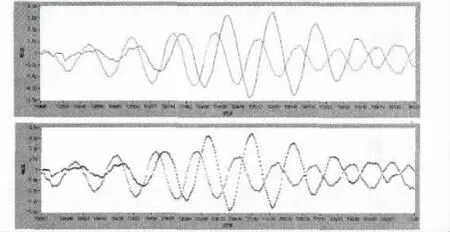
图5 波形10接收信号处理
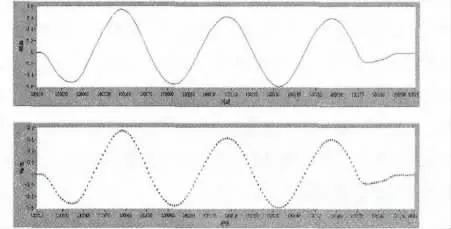
图6 波形4发射信号处理
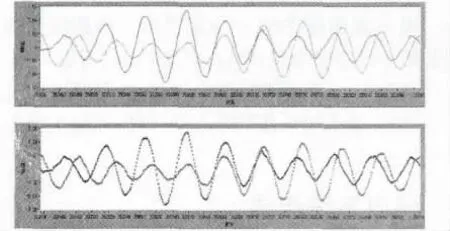
图7 波形4接收信号处理
[1] 张玥,陆英.基于巨磁阻传感器的无线船舶航向自动测量系统研究[J].上海船舶运输科学研究所学报,2014(3):15-18.