基于LabVIEW探测车运动功能的设计
2015-05-05谢丽蓉常一峰胡婷婷
路 朋, 谢丽蓉, 常一峰, 胡婷婷
(新疆大学 电气工程学院, 新疆 乌鲁木齐 830047)
基于LabVIEW探测车运动功能的设计
路 朋, 谢丽蓉, 常一峰, 胡婷婷
(新疆大学 电气工程学院, 新疆 乌鲁木齐 830047)
设计了一台多功能探测车,介绍了探测车的各项功能设计过程。该设计以PC机和DaNI探测车的硬件平台为基础,以LabVIEW 2013为主软件开发平台,以LabVIEW Robotics、FPGA、Real-Time为辅助软件,并配备了超声波传感器。通过LabVIEW Robotics 2013软件编写程序,可以控制探测车的运动,完成自动避开障碍物、手动运行、正多边形运行和S形轨迹运行等多种功能。
探测车; LabVIEW; DaNI平台; 运动控制; 避障功能
为了使探测车顺利完成探测任务,通常要求探测车的移动具有灵活避障、越障、爬坡和较好被动适应地形的能力。先进的导航技术和控制技术固然可使探测车的避障能力得以加强,然而发展先进的移动系统、提高移动系统在执行任务中的行驶性能和工作稳定性也是探测车研制的重要内容[1]。在很多文献中都有利用LabVIEW软件进行实验系统设计的记载[2-13],本文根据这些文献的思路,以LabVIEW 2013为主软件,以DaNI为测试平台,以LabVIEW Robotics、FPGA、Real-Time为辅助软件,完成了探测车自动避障、手动控制、S形行走轨迹等功能的设计。
1 硬件系统介绍
采用的硬件为PC机和美国NI公司开发的DaNI探测车测试平台(见图1)及其配套设备。NI LabVIEW探测车起步包,也被称为DaNI(NI公司研制的小型运动机器人),是一类工业级、现成的探测车平台,在设计上既适合传授探测车和机电一体化概念,也适合探测车系统的原型开发。该套件提供了传感器、电机以及用于嵌入式控制的NI Single-Board RIO设备,采用LabVIEW图形化开发环境,可对套件内含的探测车进行编程。

图1 DaNI 2.0探测车测试平台
控制模块以NI Single-Board 9632为核心模块,以FPGA模块、Real-Time模块为辅助模块。电机采用2个12 V直流电机,分别驱动探测车的左右轮。所需电流范围为0~4.66 A和堵转电流4.6 A。Single-Board RIO嵌入式控制器的输出电流为3 mA;传感器采用频率为40 kHz的超声波传感器,可以探测障碍物的最小距离为2 cm、最大距离为3 m。超声波传感器可在伺服电机的带动下转向,在运动过程中可以探测到前方180°范围内的障碍物。
2 运动功能系统总体设计
探测车多功能运动测试系统由DaNI测试平台、Single-Board RIO、超声波传感器和系统软件构成,总体设计结构框图如图2所示。

图2 探测车运动功能总体设计框图
NI sbRIO-9632嵌入式控制器是DaNI探测车的核心,具有400 MHz工业处理器,内部嵌有FPGA模块,110条3.3 V(容限SV/兼容TTL)数字I/O线,32路单端/16路差分电路、16位分辨率、最高采样速率达250 kS/s的模拟输入通道,4路16位分辨率、最高更新率达100 kS/s的模拟输出通道。另外还有3个连接器,适用于使用板卡级NIC系列I/O模块的扩展I/O。
可重新配置的I/O功能允许为DaNI探测车pigtail扩展设计和开发所需的各种传感器,如雷达、红外线、陀螺仪等。sbRIO-9632在设计上能够轻松嵌入高容量应用,实现灵活性、可靠性和高性能。
超声波传感器可测量到距离2 cm~3 m的障碍物,频率为40 kHz。有一个伺服电机控制其扫描角度,可以扫描180°的周围环境。
本系统采用NI sbRIO-9632嵌入式控制器作为整个测试系统的执行单元,通过超声波传感器实时采集现场模拟信号。信号经过控制器内部调理后,便可下达执行指令。控制器内置10/100 Mbit/s以太网端口,可实现网络与主机内置式Web(HTTP)和文件(FTP)服务器上的编程通信。也可使用RS232串行端口来控制周边设备。本文选用GPIB接口进行通信,数据传输速度可以达到1.5 Mbit/s,且传输距离远、可靠性好。连接方式为总线并行式,仪器直接并联在总线上,可与符合国际标准的各类程控仪器连接,构成自动化测试系统网。
3 系统软件设计
3.1 软件开发平台
采用LabVIEW 2013作为探测车运动功能开发平台。LabVIEW的图形化编程容易,具有丰富的扩展函数库和分析子程序,使之在开发虚拟仪器上具有独特优势。辅助软件用NI推出的LabVIEW Robotics 2013,该软件是图形化系统设计(GSD)软件的新成员,提供了标准的开发平台,用于设计探测车和自主控制系统。此外,LabVIEW Robotics 2013还提供了丰富的探测车函数库,可以连接标准探测车的传感器和执行机构,集成了智能操作和感知的基础算法,拥有探测车和自主式车辆的运动控制函数。以上软件的配合编程,使用起来方便、快捷,大大提高了系统的开发效率。
3.2 软件设计
为使测试系统具有良好的扩展性并便于升级,采用了模块化、结构化的软件设计方法,使功能程序和驱动程序相对独立。软件包括系统初始化、系统参数配置、传感器数据采集和数据保存等模块,系统设计流程如图3所示。当用户启动运动系统后,系统进行初始化,然后输入功能参数,数据输入正确后将执行选定的功能。如果数据输入错误,则系统重新初始化。

图3 系统设计流程图
3.2.1 多功能环节设计
本文一共设计了4个功能,分别是自动避障功能、手动控制功能、正多边形运动以及S形轨迹运动功能。考虑到便于管理和操作方便等原因,结合了LabVIEW Robotics自带的基础程序,汇编出了一个总程序。在该总程序中,可以方便地选择不同的功能,不仅直观、方便,还可以使得界面更为美观。
3.2.2 自动避障功能设计
在自动避障功能的设计中,首先给DaNI多功能探测车初始化,设定伺服电机带动超声波传感器的转向角度。用一个周期为20 ms的定时循环来编写程序,保证电机在运行控制过程中的连续性和实时性。在程序中,采用了4个移位寄存器,分别将车与FPGA通信数据流、车运动数据流、扫描障碍数据流和错误数据流在每次循环的终点又送回下一次循环的起点,以保证每次循环正确、可靠地进行。自动避障程序图如图4所示。

图4 自动避障程序图
3.2.3 手动功能设计
在手动控制功能程序的前面板中,垂直指针滑动杆和水平指针滑动杆分别代表探测车的前进速度和转向角速度。此外,前面板中还有布尔量开始按钮、暂停按钮、停止按钮、读取距离按钮。其中,布尔量开始按钮用来控制探测车运行,停止按钮是用来结束整个程序,读取距离按钮用来显示探测车行走的距离。手动控制功能程序图如图5所示。

图5 手动控制功能程序图
3.2.4 S形轨迹功能设计
在探测车的S形轨迹设计中,前面板设计较简单,选取2个数值量分别表示探测车行走轨迹的半径和速度,有一个布尔量表示停止。在前面板改变速度即可改变探测车行走一个半圆弧的时间,改变半径即可改变探测车行走的一个半圆弧。首先通过半径求出第一个弧长,根据弧长和速度求出行走时间t,由t来延时第一帧平铺顺序结构,用时间t计算出转弯时需要的角速度ω,先设计出1/2圆弧,计算公式如下:
(1)
将所求出的角度和运动时前进的速度,一同合并成数组并分别对应X坐标数值和Y坐标数值,延时时间的单位用毫秒(ms),所以要进行单位转换,把s换成ms。S形轨迹程序图如图6所示。

图6 S形轨迹程序图
3.2.5 正多边形轨迹功能设计
采用2级平铺顺序结构设计正多边形轨迹,利用正多边形内角和、外角和计算出角度,输入角度后需要转化为弧度,之后给舵机赋值为“0”,这样可以保证探测车的初始位置正好为0°。调用一个While循环,定时为20 ms,保证程序的连续性。当程序执行到While循环时,首先读取角度,转化为弧度后即可按特定多边形运行。正多边形程序图如图7所示。
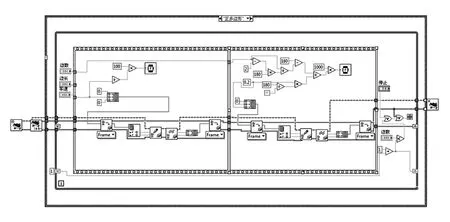
图7 正多边形程序图
4 结束语
本文利用图形化编程软件LabVIEW进行了探测车运动功能的开发及其程序设计,分别完成了自动避障功能、手动功能、S形轨迹功能、正多边形轨迹功能的设计。通过DaNI 2.0探测车平台进行现场演示,表明设计是成功的。
References)
[1] 尚伟燕,李舜酩.六轮腿式探测车行走机构结构设计及动力学分析[J].机械制造,2010(10):15-18.
[2] 黄豪彩,杨灿军,陈道华,等.基于LabVIEW的深海气密采水器测控系统[J].仪器仪表学报,2011(1):40-45.
[3] 王芃,高震,董景新.一种物美价廉的基于LabVIEW的PID控制实验装置设计[J].实验技术与管理,2014,31(1):107-109.
[4] 聂影,冯向军,廖瑛,等.基于LabVIEW的状态机模型研究[J].计算机测量与控制,2007(9):1166-1168,1171.
[5] 葛亚明,于鑫,李军,等.基于LabVIEW和PCI-1711的过程控制实验系统设计[J].实验技术与管理,2015,32(1):108-111.
[6] 王建群,南金瑞,孙逢春,等.基于LabVIEW的数据采集系统的实现[J].计算机工程与应用,2003(21):122-125.
[7] 罗建,雷勇,黄昊,等.基于LabVIEW的远程电机实验台的构建[J].实验技术与管理,2014,31(3):122-125.
[8] 李伟,陈国明,张传荣,等.基于LabVIEW的ACFM网络实验平台开发与测试[J].实验技术与管理,2013,30(3):65-67,73.
[9] 纪仁杰,刘永红,吴宝贵,等.基于LabVIEW的电火花放电状态检测实验平台开发[J].实验技术与管理,2015,32(2):73-76.
[10] 岳洪伟.基于LabVIEW的数字信号处理虚拟实验平台实现[J].实验技术与管理,2011,28(8):70-72.
[11] 齐羽.基于LabVIEW的嵌入式系统实验平台设计与实现[J].实验技术与管理,2011,28(11):50-51,56.
[12] 周雅,殷志锋.LabVIEW环境下信号处理类课程信息化实验仿真平台[J].实验技术与管理,2013,30(11):137-140.
[13] 师青梅,皮伟.基于虚拟仪器技术的太阳能电池实验教学创新[J].实验技术与管理,2013,30(2):94-96,100.
Design of rover sport function based on LabVIEW
Lu Peng, Xie Lirong, Chang Yifeng, Hu Tingting
(College of Electrical Engineering, Xinjiang University, Urumqi 830047, China)
This design adopted in PC hardware platform and DaNI robot, mainly 2013 LabVIEW software development platform, LabVIEW Robotics, FPGA, Real-Time for the auxiliary software, and cooperated with ultrasonic sensor to constitute a multifunctional machine sports car. Through LabVIEW Robotics 2013 software program, the movement of the robot can be controlled, to realize automatically avoiding obstacles, manual operation, regular polygon running and S-shaped path and other functions.
robot; LabVIEW; DaNI platform; motion control; obstacle avoidance
2015- 04- 21
国家自然科学基金项目(51264036);新疆大学“运动控制系统”精品课程建设项目(XJU201202)
路朋(1989—),男,河南周口,在读硕士研究生,主要研究方向为控制系统优化设计
E-mail:xjdxlu@163.com
谢丽蓉(1969—),女,湖南衡阳,硕士,副教授,主要研究方向为控制系统优化设计.
E-mail:wzywwwxr@163.com
TP242.6
A
1002-4956(2015)12- 0143- 03
