能量回馈式异步电机测试平台设计
2015-05-05王秀莲郭瑞光毕大强
王秀莲, 郭瑞光, 毕大强
(1. 沈阳理工大学 自动化与电气工程学院, 辽宁 沈阳 110168; 2. 清华大学 电机系,电力系统国家重点实验室, 北京 100084)
能量回馈式异步电机测试平台设计
王秀莲1, 郭瑞光1, 毕大强2
(1. 沈阳理工大学 自动化与电气工程学院, 辽宁 沈阳 110168; 2. 清华大学 电机系,电力系统国家重点实验室, 北京 100084)
设计了一种功能全、上位机界面友好的具有能量回馈功能的异步电机测试平台,对测试平台的整体硬件结构和上位机实时监控界面进行了详细阐述。该测试平台采用能量回馈技术,将陪试电机在加载过程中产生的电能回馈到电网,增强对电能的利用率。减少了测试工具,改进了堵转实验方法,使实验更加便捷。设计的基于LabVIEW的上位机监控系统易于控制被试机与陪试机各项功能,实现对测试结果的实时波形化监测。该平台实现简单、控制精确,可方便实现对三相异步电机的教学实验研究。
异步电机; 测试平台; 能量回馈; LabView
电机是国民经济中应用最广泛的一种发电设备、动力设备和自动控制元件[1]。随着电力电子技术、先进控制技术的快速发展,异步电机成了主要的传动电机。验证异步电机工作特性是大学电机学课程中重要的实验内容,其目的是验证电机正常带载工作的情况。
该测试平台主要由被试电机部分、加载部分组成。传统加载部分是一个耗能制动器,例如电涡流测功机、水力测功机、磁滞测功机、磁粉测功机等[2],加载时耗能制动器散热耗能,造成能量的浪费。文献[3]提出了一种用直流电机作为测功机,对其进行控制用来模拟机械负载,但直流电机的电刷损耗大、维修难。浙江天煌公司的DDSZ-1 型电机及电气技术实验装置由于采用发电机电阻箱负载,加载范围较窄,负载调节不方便,动态实验时不能保持恒转矩加载特性[4]。文献[5]利用仿真验证了电力测功机的能量回馈式功能,但缺少实物验证。文献[6]介绍了一种能量回馈型陪试机加载测试平台,利用上位机采集分析数据,但没有给出上位机的具体实现功能。
本文设计了一种在被试机部分采用一台变频器控制被试电机,加载部分采用可控整流模块+变频器控制陪试电机的电机测试平台。并设计了基于LabView的上位机监控系统。针对节能环保理念,采用有源前端AFE(active front end)作为可控整流模块,提高电能利用率。利用恒转速、恒转矩加载实验验证电机的稳定性。为改进异步电机的堵转实验方法,利用闭环转速控制方式使陪试机处于零速控制。根据负载实验分析电机的人为机械特性。本文设计的实验平台减少了机械夹、电压电流表和功率表等传统工具,改进了实验方法。上位机监控系统对电机测试平台的控制与检测达到了良好的效果。
1 异步电机实验平台结构设计
1.1 整体系统构成
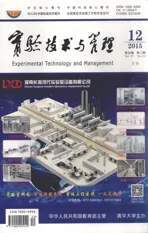
如图1所示,整体平台由被试机部分、陪试机部分和上位机组成。被试机部分主要由变频器1和被试电机组成;陪试机部分主要由陪试电机、变频器2和有源前端整流单元(AFE)组成。工作状态的监控主要是有上位机来完成。
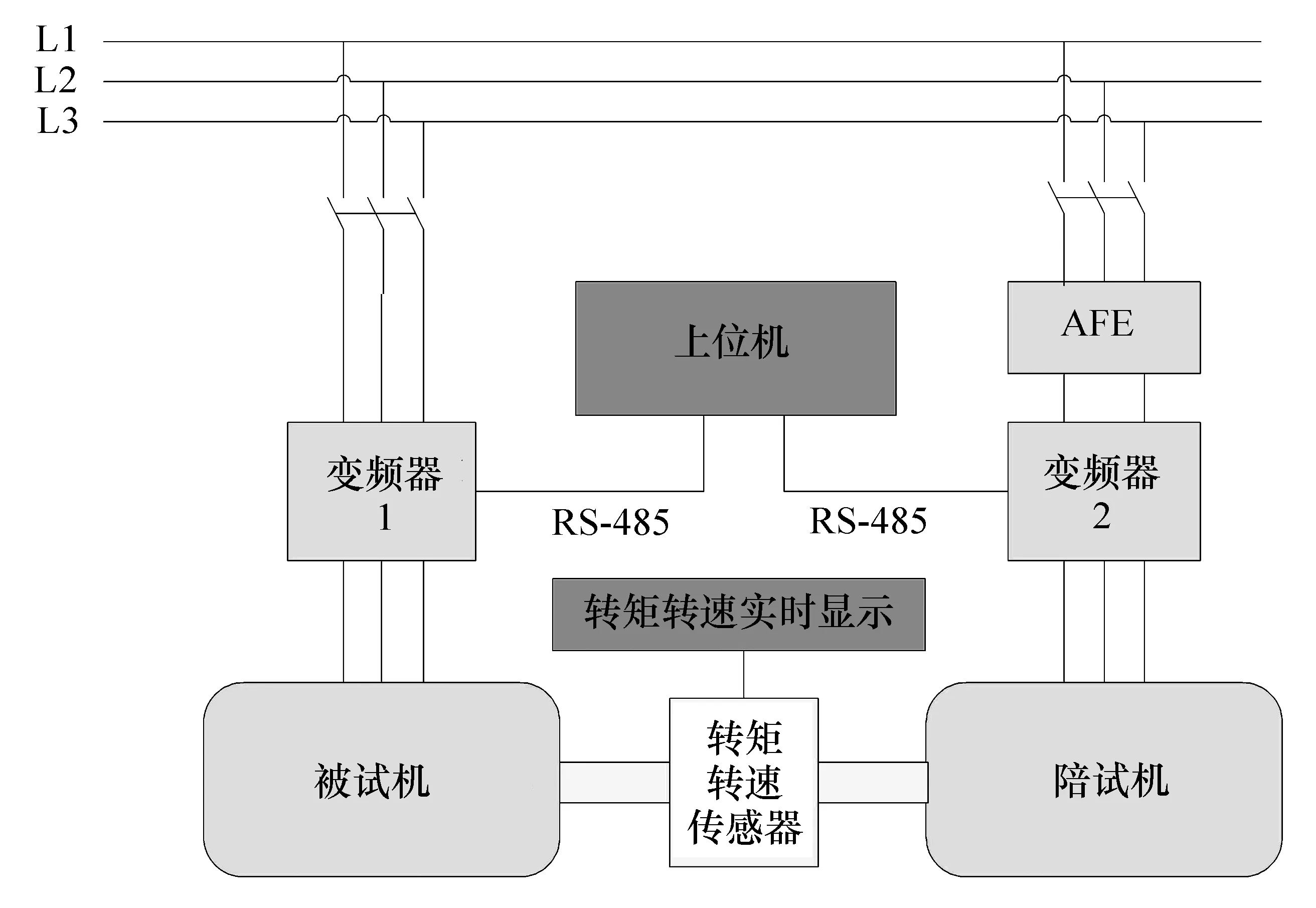
图1 实验平台整体结构
1.2 主要部件及作用
1.2.1 变频器
变频器1与变频器2的功能类似: (1)可以拖动电机稳速运行,且稳速精度好;(2)可以拖动电机恒矩运行,为负载实验提供恒定的负载转矩,且恒矩精度良好;(3)拥有良好的追踪启动能力,能方便地起动旋转中的变频电机;(4)变频器带有MODBUS总线接口,实验系统采用上位机技术,通过RS-485串口通信与上位机连接,根据MODBUS协议对工作参数进行设置,对运行状态进行监视。
1.2.2 有源前端整流单元
AFE从结构上看相当于一个逆变器,不同的是其输入为交流,输出为直流。由于它位于电源进线端,所以被称为前端。AFE能消除高次谐波,提高系统功率因数,具有卓越的动态性能。另外还具有稳压功能,保证变频器输出直流母线电压达到570 V。当电机处于再生发电状态时,能量由电机侧回馈到直流侧,导致直流母线电压升高。当直流母线电压超过AFE预设工作电压时,AFE将能量从直流侧回馈电网。
1.2.3 上位机
上位机可以看作一个控制与检测电机实验平台工作状态的虚拟监控界面。利用上位机监控下位机,将实验结果实时地返回到上位机,通过上位机实时检测界面来检测和分析实验结果。
2 实验平台工作原理
2.1 三相异步电机原理
异步电机是一种交流电机,主要由定子、转子和它们之间的气隙构成[1]。在给定子绕组注入交流电后会产生一个旋转磁场,其磁场转速与转子转速有如下关系:s=(ns-n)/ns,s为转差率,ns为磁场的转速,n为转子的转速。根据转差率的不同,异步电机可运行在发电机、电动机和电磁制动3个状态下,如图2所示(图中Te为转矩)。

图2 异步电机运行状态
2.2 被试机与陪试机的平衡关系
被试机和陪试机采用联轴器刚性连接,所以被试机和陪试机的转速相等。
被试电机的转矩平衡方程为
(1)
式中,TM为被试机电磁转矩,TL为负载转矩,JM为被试机转动惯量,RM为被试机阻力系数,ω为转速。
陪试机的转矩平衡方程为
(2)
式中,TD为陪试机电磁转矩,JD为陪试机转动惯量,RD为陪试机阻力系数。
陪试机的转矩为负号时,表示陪试机处于发电状态。当被试机与陪试机处于稳定的平衡状态时,由式(1)和式(2)两式相加得:
TM=RMω+RDω-TD
(3)
因此改变陪试机输出的电磁转矩,就能调节被试电机的负载转矩。通过对陪试机电磁转矩的直接控制,间接地调节了被试电机的负载转矩,实现被试电机的加载。
2.3 能量回馈的可控整流单元
2.3.1 AFE数学模型
AFE由 PWM 整流部分和 PWM逆变部分组成,可实现能量双向流动[7],AFE主电路的拓扑结构如图3所示。图3中的ea(t)、eb(t)、ec(t)为电网三相电动势,L为网侧滤波电感,C为直流侧滤波电容。
通过Clark与Park变换对交流电压、电流进行解耦,将三相对称正弦量转换为两相静止直流量,从而简化控制设计。
AFE两相旋转坐标系下数学模型:
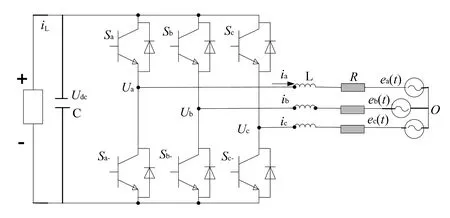
图3 AFE拓扑结构
(4)
式中:Udc为直流母线电压;ud=ed-vd,uq=eq-vq,vd和vq分别为交流输出侧输出电压的d、q分量。
2.3.2 AFE的控制方法
根据AFE数学模型给出控制方法,整个AFE的控制系统分为电压外环控制和电流内环控制的两环控制,如图4所示。直流母线电压环和d轴电流环负责将陪试机所发电的有功功率传递到电网,q轴电流环根据电网的需求产生所需的无功功率。如果q轴电流应为0时AFE运行在单位功率因数状态。

图4 AFE控制方式
3 实验平台的搭建与分析
3.1 异步电机实验平台和功能设计
(1) 被试机与陪试机都采用异步电机,被试电机额定功率为1.5 kW,额定电压为380 V,额定电流为3.7 A额定转速为1 440 r/min;陪试电机额定功率为1.5 kW,额定电压为380 V,额定电流为3.15 A,额定转速为1 403 r/min。
(2) 变频器1控制方法采用恒压/恒频控制和闭环转速控制;变频器2控制方法采用转矩控制。上位机监控系统通过RS-485通信与变频器1、变频器2相连,利用上位机控制并检测他们的工作状态。
(3) AFE直流侧预设电压为570 V。并联一个预充电模块,当直流侧电压达到额定电压的0.8倍时启动AFE单元。
(4) 能完全实现三相异步电机教学实验功能。通过上位机控制和检测测试平台的具体实验步骤实现。在陪试机处于发电状态时,AFE将能量回馈给电网。
3.2 异步电机实验平台的实验监控
随着虚拟仪器技术极大的发展,减少了传统测量技术在硬件设备上的投资[8-12],本文基于LabView软件设计研发了测试平台的上位机监控系统。该系统能控制被试机和陪试机的启停状态、正反转状态和故障复位状态,并且对被试机和陪试机的电压、电流等参数进行实时监控。电机测试上位机监控系统界面分为参数设置界面和实时监控界面。
图5为回馈式异步电机实验平台的上位机参数设置界面。该参数设置界面包括3个子界面:被试机参数设置界面、陪试机参数设置界面和AFE界面。参数设置界面功能主要是设置串口参数、电机基本参数、直流侧电压和电机控制方法。
图6为上位机监控实验平台界面,控制并监测电机实时状态。
图5 上位机基本参数设置界面
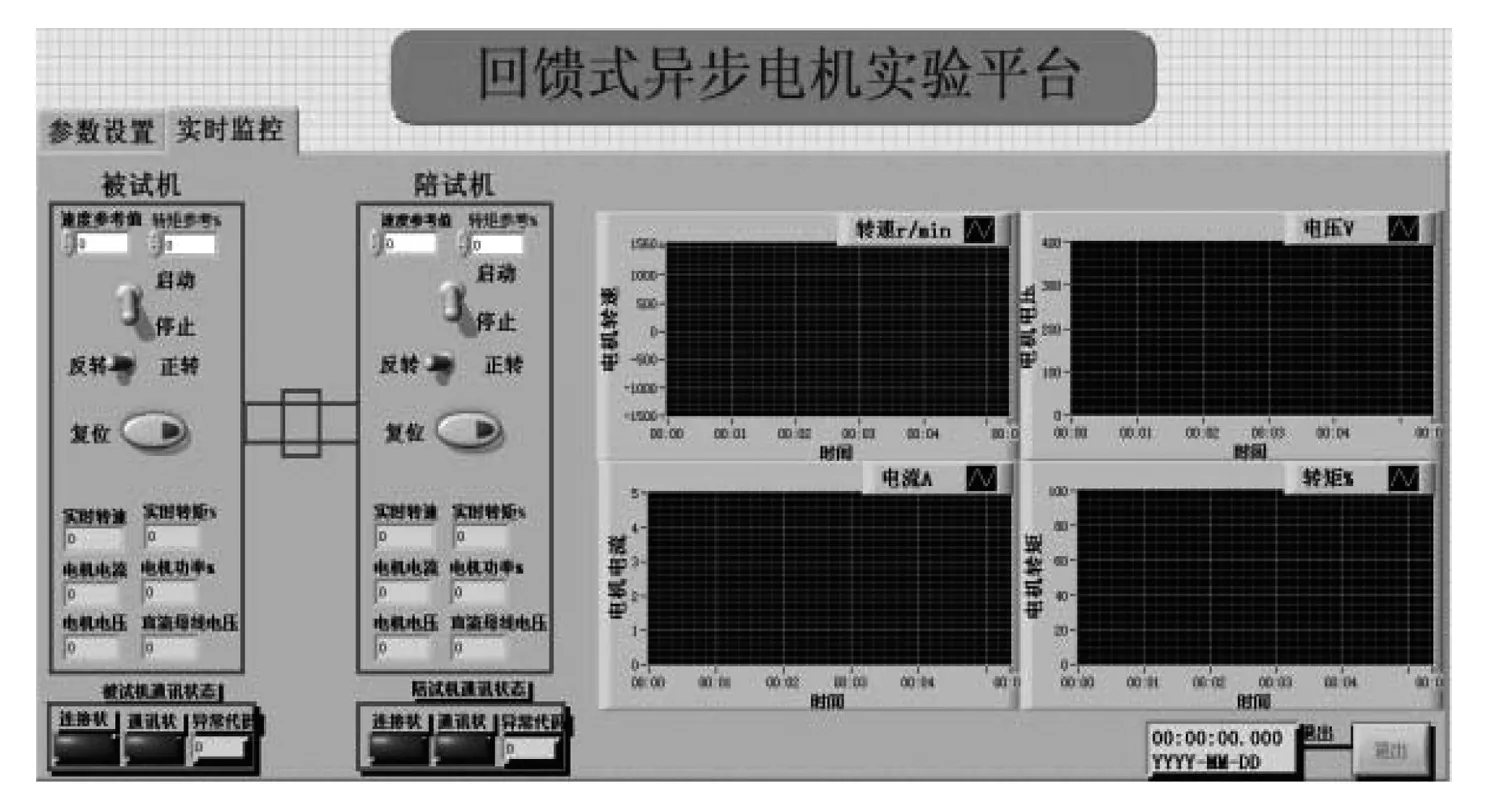
图6 上位机实时监控界面
利用LabVIEW后面板的程序设计实现测试系统界面功能,后面板程序设计包括串口配置设计、根据MODBUS协议实现电机控制与参数调试程序设计和实时监控程序设计,分别见图7中的(a)、(b)、(c)。
3.2.1 恒转速、恒转矩加载实验的监控与分析
为了测试恒转速、恒转矩状态下电机的稳定性,被试机采用转速控制,陪试机采用转矩控制。图8为被试电机在恒转速状态下,陪试电机给其提供不同负载时的上位机波形曲线。图9为被试电机在恒转矩状态下,被试电机转速变化的上位机波形曲线。
(1) 由图8异步电机处于恒转速运行时的工作曲线可知,控制被试机的转速恒定,转速为600 r/min;改变陪试机的电磁转矩,被试机分别依次加载被试机额定转矩的10%、18%、25%、38%、44%、60%、20%、70%。可知不管被试机负载如何变化其转速恒定不变,验证不同转矩下电机的稳定性。
(2) 由图9可知,被试电机空载运行在13 s时,由陪试机给被试机加载恒定转矩为陪试机额定转矩的30%;然后改变被试机转速,给被试机转速依次为600、800、1 000、500、300、700 r/min,在速度变化时被试机的电磁转矩基本保持不变,验证不同转速下电机的稳定性。

图7 界面功能程序设计

图8 恒转速状态波形曲线

图9 恒转矩状态波形曲线
3.2.2 异步电机堵转实验监控与分析
陪试机处于闭环转速控制,且参考转速设为0,省去机械夹、电压电流表等传统工具。图10为被试机处于堵转实验时的波形曲线。

图10 堵转实验波形曲线
由图10可知,被试机转速为0,定子相电流和电磁转矩随着线电压的增大而增大。调节被试电机电流从0到额定电流值,记录相关数据,能够快速方便地绘制堵转特性曲线,如图11所示。

图11 堵转特性曲线
3.2.3 异步电机负载实验监控与分析
被试机采用恒压/恒频控制,陪试机采用转矩控制。异步电机有固有机械特性与人为机械特性之分,通过负载实验分析改变电源频率的人为机械特性。
由图12可以直观地看出,改变电源频率,控制被试机起始速度为600 r/min,随着负载转矩的增加,异步电机转速下降、转差率会增大。根据所占额定转矩的百分比可以算出不同转差率下的转矩。由图12可得到被测电机机械特性如表1所示。

图12 负载实验波形曲线
表1 被试电机改变电源频率的人为机械特性
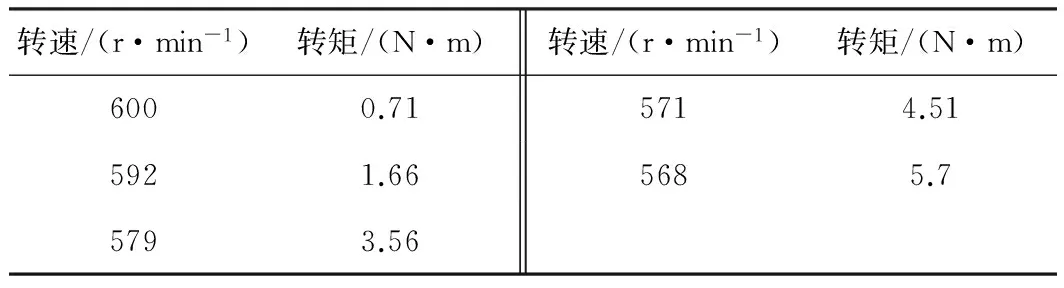
转速/(r·min-1)转矩/(N·m)转速/(r·min-1)转矩/(N·m)6000.715714.515921.665685.75793.56
3.2.4 可控整流单元AFE电网端波形的分析
图13为AFE在不同状态下稳态运行的电压和电流的波形图。图13(a)是陪试机工作在电动模式时,AFE处于整流状态。电网A相电压波形与电流波形相位近似一致,实现了近似单位功率因数且波形较好。图13(b)是陪试机给被试机加载负载转矩时,陪试机工作在发电模式、AFE处于逆变状态。电压与电流波形反相,实测功率因数绝对值≥0.95陪试机发出的电能回馈给电网,且波形接近正弦,降低了对电网的污染程度。

图13 AFE网侧A相电压与电流的波形
4 结束语
为了异步电机测试实验的研究,建立了回馈式异步电机测试平台,该平台较理想地完成了设定的控制目标。实现了利用上位机对测试过程的全自动化监控,同时还克服了传统电机测试系统负载调节繁琐、能量浪费严重等缺点,具有操作简单、维护方便等优点。去掉了机械夹、电压电流表、功率表等工具和仪表。采用AFE整流单元进行能量回馈设计,提高了电能利用率,实现了单位功率因数逆变,也减小了对电网的谐波污染,整个平台系统可靠。
References)
[1] 汤蕴璆,罗成立.电机学[M].北京:机械工业出版社,2010:1-5.
[2] 赵泉明.全封闭交流异步电力测功机系统研究[D].长沙:湖南大学,2005:2-4.
[3] Hewsonewson C R, Sumner M, Asher G M, et al. Dynamic mechanical load emulation test facility to e-valuate the performance of AC inverters[J]. Power Engineering Journal,2000,14(1):21-28.
[4] 郑玲玲.天煌教仪系列产品介绍[J].电气电子教学学报,2005,27(1):117-119.
[5] 王学之,王明渝.能量回馈式异步电力测功机系统的研究[J].微电机,2010,42(2):87-90.
[6] 周鹏,王英.能量回馈型异步电机测试系统[J].电机与控制应用,2011,38(4),57-60.
[7] 张广辉.三相 PWM 整流器控制策略的研究[D].贵阳:贵州大学,2009.
[8] 陈桂友, 柴远斌. 单片机应用技术[M]. 北京: 机械工业出版社. 2008.
[9] 闫群民. 基于LabVIEW的超文本报表生成方法[J]. 自动化仪表, 2010,31(7): 29-31.
[10] 黄永红, 王恒海, 陈照章,等. 基于LabVIEW的温度监控与介电谱测试系统研制[J]. 仪器仪表学报2008,29(7):1544-1547.
[11] 李江全,刘恩博,胡蓉,等. LabVIEW虚拟仪器数据采集与串口通信测控应用实战[M]. 北京: 人民邮电出版社, 2010.
[12] 杨乐平,李海涛,肖相生,等. LabVIEW程序设计与应用[M].2版.北京:电子工业出版社,2006.
Design of energy feedback based test platform for induction motor
Wang Xiulian1, Guo Ruiguang1, Bi Daqiang2
(1. College of Automation and Electrical Engineering, Shengyang Ligong University, Shengyang 110168, China; 2. State Key Laboratory of Power Systems, Department of Electrical Engineering, Tsinghua University, Beijing 100084, China)
This paper designs an induction motor test platform with energy feedback function, which has full functions, and its human-computer interface is friendly. This paper describes in detail the structure of the overall hardware and the real-time monitoring interface of designed test platform. The experimental platform uses energy feedback technology and makes the power, which is generated by the motor during the loading process, back to the grid, and enhances the utilization of electrical energy. Improving the blocked-rotor test method to make the experiment more convenient, the LabVIEW based monitoring system can control various functions and show experimental results of the real-time waveform monitoring easily. The realization of platform is simple, and its control is accurate. The teaching experimental platform of three-phase induction motors can be completed conveniently.
induction motor; test platform; energy feedback; LabView
2015- 04- 27 修改日期:2015- 06- 19
王秀莲(1965—),女,辽宁沈阳,博士,教授,硕士生导师,研究方向为电力系统自动化、智能电网及新能源技术.
E-mail:wxiulian_wang@163.com
TM343;G642.0
A
1002-4956(2015)12- 0073- 06