决定手机拍照效果的三大因素
2015-04-29


随手拍改变了人们日常拍照的体验,拍照的好坏成为了评判一款手机优劣的重要参数,越发透明的参数简介与技术名称出现在我们眼前,经过洗礼后的消费者对逐渐明白像素并不是影响拍照效果的唯一参数,CMOS感光芯片、单像素感光面积、光圈大小、镜头以及成像的软件算法等才是决定手机拍照优劣重要因素。
像素不是越高就越好
自从数字成像技术成为拍摄主流后,感光芯片成为了成像画质最关键的因素。在一代代技术革新后,现阶段智能手机几乎都采用了堆栈式CMOS芯片,而索尼IMX214就是堆栈式CMOS芯片代表作,几乎所有的主流智能手机均采用这一芯片,既然都使用相同的CMOS传感器,在元器件的基础上就谈不上谁优谁劣,在我们略过这一段前还需要了解CMOS的重要参数:“单芯片感光面积”与“单像素感光面积”。
单芯片感光面积主要是感光芯片的感光总面积,索尼IMX214尺寸为1/3.06英寸,索尼Exmor RS则为1/2.3英寸,这是我们常见智能手机的CMOS尺寸,当然我们也不排除CMOS尺寸更大的智能手机的存在;单像素感光面积主要指的是单个像素在感光芯片上的感光面积,计算公式就是单芯片感光面积除以像素数量。
单芯片感光面积大的未必单像素感光面积就大,这还要取决于像素的数量。那么像素数量是否越大越好就成为了一个关键性问题,在恒定的单像素感光面积下,增加像素数量是可以提高手机的解析力的,高像素设备会比低像素设备收集到更多的细节,放大来看会更清晰。但是由于目前手机尺寸的关系,机身内部对摄像头感光元件尺寸也是有很大限制的。所以一般在提升像素数量的同时,很难再提升单像素面积,甚至是降低单像素面积,这样就会造成摄像头对光线的收集能力减弱,从而造成画质变差。再加上我们使用手机拍照的图片基本都在手机屏幕上观看,算上剪裁画面后,1300万或是2000万像素的实用性并没有比800万像素表现出色。
CMOS传感器又分为背照式和堆栈式两种,二者系出同门,技术最早都由索尼研发,索尼背照式传感器品牌名为“Exmor R”,堆栈式传感器为“Exmor RS”。背照式传感器的出现,有效地解决了传感器尺寸与体积成本成正比的问题,在相同尺寸下,它使传感器感光能力提升了100%,有效地改善了在弱光环境下的成像质量。所以,之前在选购拍照手机时,用户都会首先考虑摄像头是否应用了Exmor R背照式传感器。
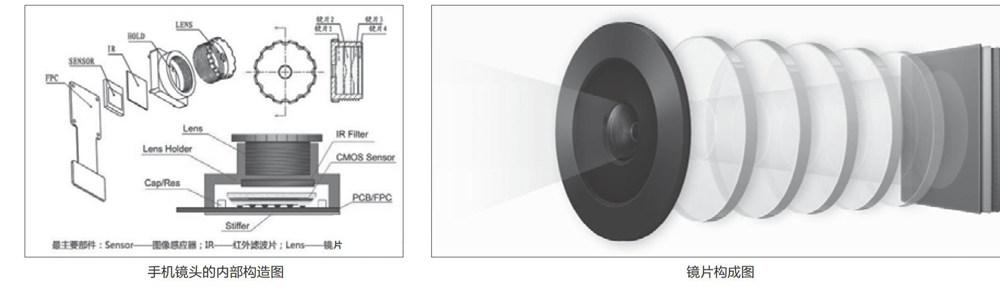
镜头决定成像
CMOS决定了手机摄像头至关重要的总像素和感光面积,而手机成像时的光圈和焦距则完全由手机镜头来控制,镜头采用的不同也是直接导致成像效果差异的主要原因。
手机镜头由于空间所限,无法做到光圈大小和光学焦距的调节,所有的手机镜头都是恒定光圈的定焦镜头。目前手机上分为自动对焦和光学变焦两种级别,最常见的便是使用AF固定焦距镜头,也就是拍照应用打开之后的默认焦距,在这个焦段下,通过镜头和CMOS协作就可以在屏幕上显示图画,并且显示的画幅是固定的,在数码变焦支持下能获得一定的变焦能力,但往往都是通过技术手段实现,最终效果并不理想。
当光圈大小和光学焦距成为恒定值后,镜片则是影响成像的重要因素。镜片一般有两种材料,一种是球面玻璃,代号为G;另一种是非球面塑胶,代号为P,手机镜头制造商在前面用数字表示镜片数量。例如6P镜片,就表示手机镜头采用了6层塑胶镜片。玻璃镜片的透光率高于塑胶镜片这是众所周知的事儿,而且光学折射和热膨胀系数远低于塑胶,但是唯一的缺点就是制造成本高、工序复杂,在成本低廉的手机上不可能大规模采用。好在目前非球面塑胶的工艺在逐渐提高,基本可以满足民用摄像领域。
图形引擎优化不可缺
CMOS感光元件和镜头是影响拍照质量的重要因素,而软件算法与调试则直接影响手机拍照质量。由于软件算法并不像硬件参数那么可感知可描述,几乎所有的用户对它都不甚了解,图像处理引擎到底是什么?它是怎样决定拍照效果好坏的呢?笔者以OPPO的PI原画引擎为例来分析。PI原画引擎主要由场景特征库和图像算法库组两部分组成。场景特征库容是一个巨大的、包含了尽可能多的摄影场景数据,比如阴天下的花朵、晴天下的花朵、阳光下的建筑、室内暖光下的人像、快速运动的物体等等,基本涵盖了你能想象的所有拍摄场景特征。每一个场景特征下,代表着不同的色彩、光线环境和白平衡等。
对应不同的场景特征,自动从数据库中选择最适应的曝光数据和成像算法,以获得最正确的曝光和成像效果。而正是这一个个对应的算法组成了图像处理引擎的算法库。现实生活中,一点点光线的变化、色彩的复杂等等都会对应一种场景特征,算起来何止成千上万。想让拍照效果变得越来越好,只有不断地丰富场景特征库和图像算法库的数据。所以,获得越来越好的拍照效果背后,是很多影像工程师苦逼的努力。因为丰富图像处理引擎是一个耗时耗力的苦活,它没有捷径,只能不断地拍摄,采集特征数据,然后成像,实验室分析优劣,进行优化,再去拍再分析优化,如此反复。
