串联预稳压并联全桥逆变电路仿真
2015-04-28郭子强李云峄
刘 嘉,郭子强,李云峄
(北京工业大学 机械电子与应用电子技术学院,北京100124)
串联预稳压并联全桥逆变电路仿真
刘 嘉,郭子强,李云峄
(北京工业大学 机械电子与应用电子技术学院,北京100124)
以逆变焊机为研究对象,为提高逆变焊接电源系统动态特性和控制精度,提出一种串联Boost预稳压输入,全桥逆变并联输出的逆变焊接电源主电路结构。分析了电路系统的功率传输原理和工作模态,进行了基于Matlab/Simulink的电路系统仿真设计,能更加直观地分析了电路的动态特性,并与传统的全桥逆变电路的仿真结果进行了对比。
焊接电源;Boost预稳压;全桥逆变;Simulink仿真
0 前言
焊机的主要部分就是焊接电源,而焊接电源的性能决定了焊机的主要性能。从电源的角度看,焊机属于一种二次电源,所谓二次电源就是将电网的电能转换为工作负载所需的电压、电流的电能转换装置。在电能转换中有三种基本方法:变压、整流和逆变[1]。一台逆变焊机从交流电网到直流输出经历过了AC-DC-AC-AC-DC四个步骤的变换过程,每一个环节对焊接工艺和焊接质量都有着很大的影响。弧焊逆变电源是一种采用3×380 V供电,经全桥整流、电容滤波为540 V的直流电。传统的全桥逆变电路由540 V直流输入,两个桥臂开关管交替工作,工作模式相当于Buck降压电路,再整流为低电压、大电流的直流输出。
随着现代电力电子技术的发展,多模块串并联组合集成系统成为研究热点。串联输入、并联输出组合系统适用于较高输入电压、较大输出电流的应用场合,这种结构可以保证在低电压输出条件下,使用高频开关管,产生高功率密度和高转换效率,另外,模块化结构有很强的冗余操作能力,使整个系统的可靠性得到提高[2]。输入串联、输出并联组合系统在高输入电压的电力机车、三相电压输入的功率因数校正技术等方面有许多应用。逆变焊机作为一种典型的高电压输入、低电压大电流输出的电源系统,串联输入、并联输出组合系统有着非常理想的应用前景。
本研究针对弧焊逆变焊接电源,提出前级串联Boost预稳压输入,后级全桥逆变电路并联输出的主电路结构。三相交流电经过全桥整流,串联的两个电容分压输入,经输出可调的Boost升压拓扑进行DCDC预稳压调节,由全桥逆变并联输出到负载。
1 串联预稳压并联全桥逆变电路的结构和工作原理
串联预稳压并联全桥逆变电路结构如图1所示,它是由两个相同的电容串联作为输入,两个相同的带有预稳压结构的全桥逆变电路并联输出。
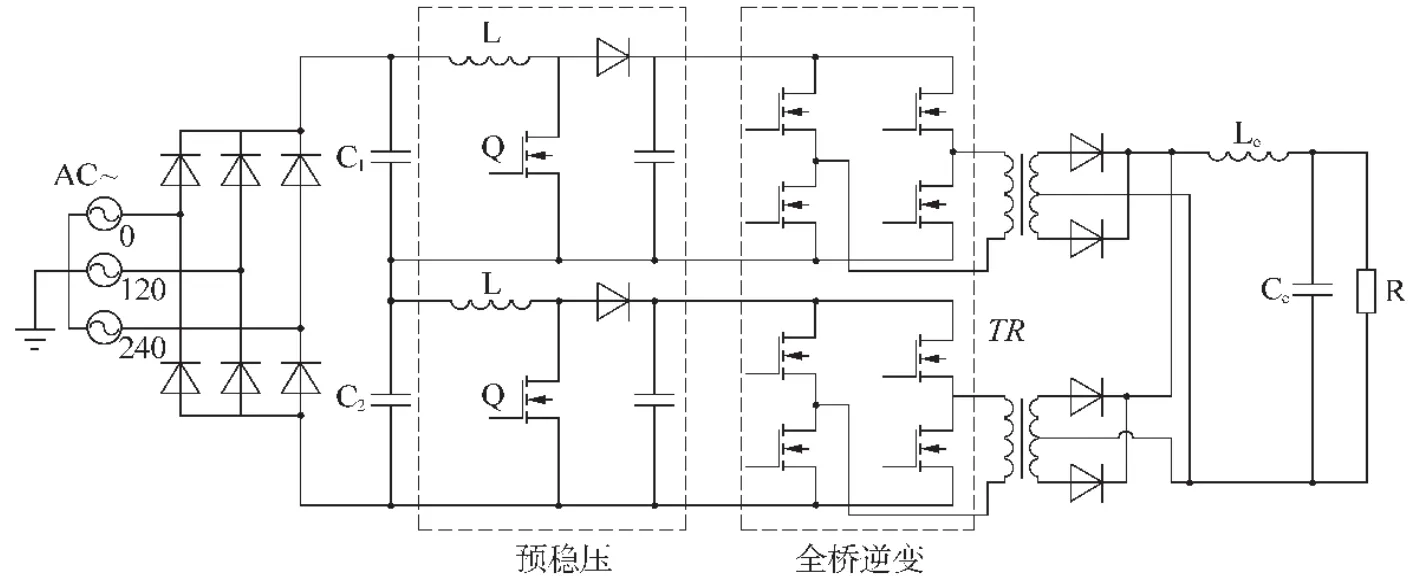
图1 串联预稳压并联全桥逆变主电路结构
在研究弧焊逆变电源的动态特性以及进行控制系统设计之前,首先必须建立电源系统的模型。弧焊逆变电源是一种线性与非线性相结合的开关电源综合系统,而开关电源中的开关管、二极管工作在通、断两个状态,是一个强非线性系统,为简单起见,使开关理想化[3],同时,本研究建模分析的前提是电感电流连续(CCM)。由文献[4]可知,全桥逆变电路的建模可以简化为Buck电路的建模,如图2所示,电路模型就可以描述为一级Boost和一级Buck串联。
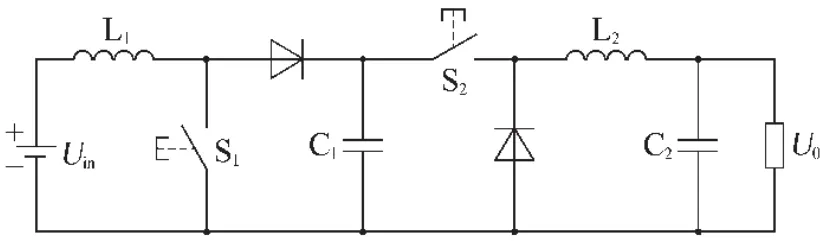
图2 串联Boost预稳压全桥逆变电路原理
通过对开关管S1、S2导通与关断的控制将功率断续的加载在储能元件上,改变储能加载在负载上电流电压的平均值,进而改变电路输出功率。为了方便表述,将开关管的通断状态用S1、S2的值(等于1或0)来表示。根据开关管S1、S2的通断状态,可以将串联电路系统分为如下四个工作模态。
模态一,S1=0,S2=1(见图3)。电路中有两个回路,输入电流经过电感L1、电容C1构成回路一,电源与L1、L2、C2和负载R构成回路二。在此过程中L1释放能量,C1、L2、C2储存能量。
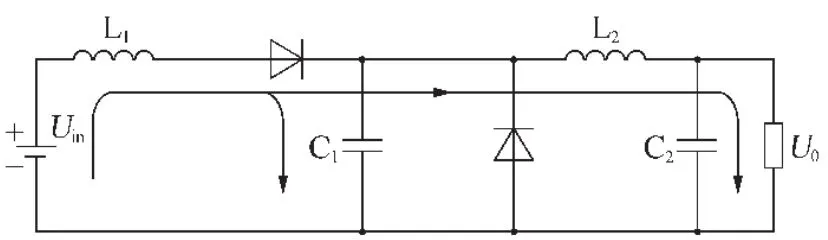
图3 电路工作模态一
模态二,S1=0,S2=0(见图4)。这时,回路一由电源与L1、C1构成,L1释放能量,C1储存能量。L2、C2释放能量,负载电流为L2与C2电流之和,并经由二极管回流构成回路。
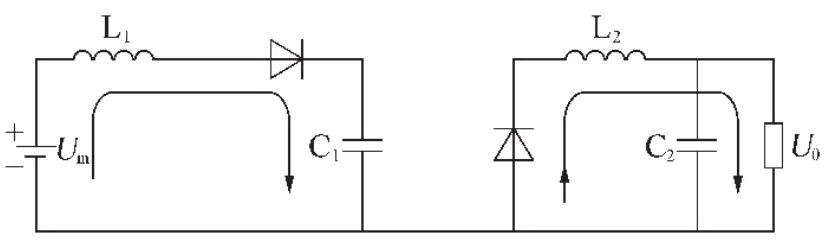
图4 电路工作模态二
模态三,S1=1,S2=1(见图5)。S1短路,电源与电感L1构成回路,L1电流迅速升高,获得较大能量。此时,C1中能量得以释放,为L2、C2和负载续流提供能量。
模态四,S1=1,S2=0(见图6)。此时电路存在两个小回路,电源为L1储能提供能量,L2、C2释放能量给负载,是负载电流连续。

图5 电路工作模态三
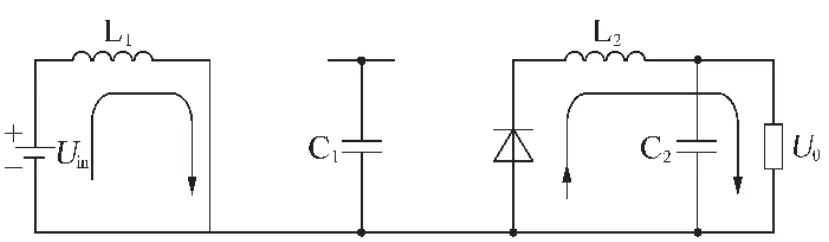
图6 电路工作模态四
2 Matlab/Simulink仿真模型建立
Matlab/Simulink提供了电源系统模块(Power System Blockset),在Power System Blockset的子模块库中包括了电源系统仿真分析所需要的模块,如电力电子子模块(Power Electronics)中的IGBT、二极管,电源库(Electronic Sources)包括各种直、交流电源,常用元器件可以在元件库(Elements)中找到其图形化模型[5]。这样方便了Power System Blockset仿真。
电力电子仿真设计时,在电源系统子模块集中选择仿真所需要的模块,直接拖动到Simulink模型文件中即可。串联预稳压并联全桥逆变电路Matlab/ Simulink主电路模型如图7所示。
进行仿真实验时,电路模型中各元件参数设置如下:分压电容C1=C2=100 μF,预稳压Boost电路电感Lp1=Cp2=60 μH,Boost拓扑输出稳压电容Cvd1= Cvd2=100 μF,变压器变比n=4.5,输出滤波电感Le= 60 μH,电容Ce=100 pF。
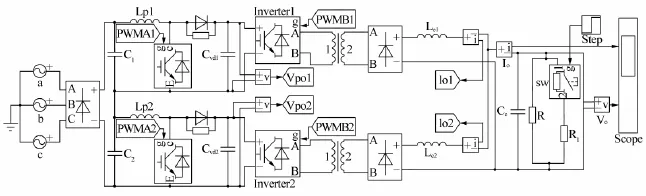
图7 Simulink仿真模型总体设计
对于电力电子技术的研究,Pspice、Saber、Orcad等仿真工具是使用最多,也非常专业。但是,它们本身在控制系统设计和仿真能力上有所欠缺或不具备这样的能力,在控制系统设计中常常要求助于Matlab或者Simulink,并且还提供Matlab的接口模块。目前Simulink集成了电源模块集,还在控制系统的研究上优于其他仿真软件,所以选择Matlab/Simulink,可以在统一的仿真环境中完成研究任务。
系统中预稳压电路和全桥逆变电路分别独立采用PI闭环控制,其控制器结构如图8、图9所示。
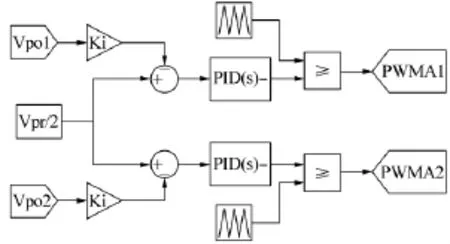
图8 Boost预稳压电路PI控制器模型
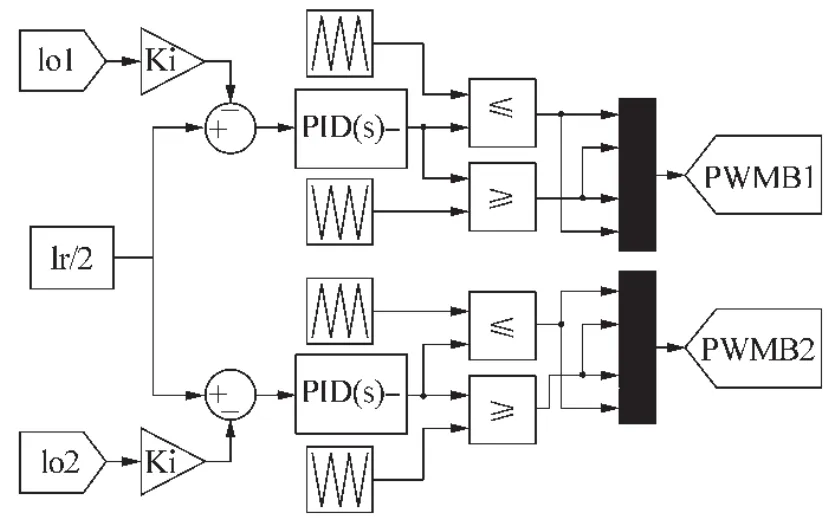
图9 全桥逆变电路PI控制器模型
在仿真研究中,开关频率设置为20 kHz,PI补偿控制器的参数设置采用Simulink优化后推荐值,可以表示为
另外,全桥逆变电路并联输出使用两个同步的PWM发生器,分别控制逆变桥两个桥臂的运行状态,并使两个控制器的PWM基波信号相差半个周期,以保证逆变器两个桥臂交错运行。
3 仿真设计和结果分析
本研究以CO2气体保护焊工艺为例,在仿真实验中分析电路的动态性能,主要分析了串联预稳压并联全桥电路系统在恒流控制下短路过渡和电流跳变过程中电流响应曲线。并在同条件下与传统的全桥逆变电路的进行电路动态特性对比研究。电源的动态特性是指:当负载状态发生变化时,弧焊电源输出电流和输出电压与时间的关系,用以表征电源对负载变化的反应能力,简称动特性[6]。
CO2焊负载曲线可以用经验公式来表示[7]
选择电流100 A、电压19 V的焊接短路和给定输出电流跳变两种情况进行研究。电流100 A、电压19 V时,焊接电源的输出回路的等效电阻为0.19 Ω,短路时假设焊接电弧的等效电阻为0.04 Ω。
具体方案为:
(1)在电流给定为100 A的条件下,初始状态的负载R=0.19 Ω,t=6 ms时,阶跃信号源step输出跳变信号1。这时理想开关Sw闭合,负载R1=0.04 Ω并联到输出回路,使等效负载变成0.033 Ω。
图10为输出恒流控制下焊接短路时电流变化波形,同样图形上方波形为带有串联预稳压电路的输出电流波形。显然,串联预稳压并联全桥逆变电路系统过渡过程更加理想,没有出现电流尖峰,调整时间可以忽略。

图10 100 A恒流条件下负载由0.19~0.33 Ω电流波形放对比
(2)当负载R=0.19条件下,电流给定值由100 A跳变到200 A,观察输出电流的响应曲线。
图11为输出电流由100~200 A跳变过渡电流波形对比,图11a是带有串联预稳压电路的电流输出波形,图11b是传统全桥逆变电路电流输出波形。图中带有串联预稳压电路系统过渡调整时间小于0.3ms,仅为传统全桥逆变电路系统的一半,且超调量更小。
(3)给定电流100 A,负载R=0.19 Ω,观察电流纹波情况。

图11 负载为0.19 Ω,电流100~200 A跳变时电流波形比较
图12b为传统全桥逆变电路输出电压有明显的跟随逆变器输入电压脉动的纹波,图12a串联预稳压的全桥逆变系统输出电流波形平滑,且纹波比例更小,约为传统全桥逆变系统的2/3。
4 结论
设计了一种串联预稳压输入、并联全桥逆变输出的模块化集成电路系统,通过平均连续法建立电路系统模型,分析了串联预稳压并联全桥逆变电路的原理,介绍了电路系统的各个工作运行模态下功率的传输回路。
建立了Matlab/Simulink平台下的仿真模型,设计仿真实验观察系统输出的动态特性,并对实验结果与传统的全桥逆变电路进行对比分析。仿真实验结果表明:串联预稳压结构能明显改善电源系统的动态特性,并消除了输入电压的脉动纹波对输出电流的影响,减小了纹波。

图12 负载0.19 Ω,输出100 A稳定时电流纹波比较
[1]中国焊接协会焊接设备分会.逆变焊机选用手册[M].北京:机械工业出版社,2012:1-2.
[2]Deshang Sha,Zhiqiang Guo,XiaoZhong Liao.Cross-FeedbackOutput-Current-Sharing Control for Input-Series-Out-Parallel Modular DC-DC Converter[J].IEEE Transactions on Power Electronics,2010(25):2762-2769.
[3]张占松,蔡宣三.开关电源的原理与设计[M].北京:电子工业出版社,2004:210-220.
[4]刘嘉.弧焊逆变电源的数字化控制[D].北京:北京工业大学,2012.
[5]黄忠霖.电工学的Matlab实践[M].北京:国防工业出版社,2010:140-175.
[6]中国机械工程协会焊接分会.焊接词典[M].北京:机械工程出版社,1997.
[7]殷树言.气体保护焊工艺基础及应用[M].北京:机械工业出版社,2012:279-282.
Simulation of series voltage regulator parallel full bridge inverter circuit
LIU Jia,GUO Ziqiang,LI Yunyi
(College of Mechanical Engineering and Applied Electronics Technology,Beijing University of Technology,Beijing 100124,China)
This article focuses on inverter welder,in order to improve the dynamic characteristics and control accuracy of the inverter welding power system,the main circuit structure of the power supply system that the Boost voltage pre-regulator in series at input and the full bridge inverter in parallel at output is proposed.Analyzes the transmission principle and working modes of the power system,designs the circuit simulation system based on Matlab/Simulink presenting the dynamic characteristics intuitively,and compares the simulation results of the new system and traditional full bridge inverter system.
welding power supply;voltage regulator;full bridge inverter;Simulink simulation
TG434.1
:A
:1001-2303(2015)10-0001-05
10.7512/j.issn.1001-2303.2015.10.01
2015-04-16;
:2015-05-20
国家自然科学基金资助项目(51375022)
刘 嘉(1969—),男,吉林省吉林人,博士,主要从事数字控制弧焊逆变电源研究工作。
