考虑相位失配量的电力系统动态状态估计方法*
2015-04-28吴亚联
吴亚联, 李 戈, 龙 辉
(湘潭大学 信息工程学院,湖南 湘潭 411105)
考虑相位失配量的电力系统动态状态估计方法*
吴亚联*, 李 戈, 龙 辉
(湘潭大学 信息工程学院,湖南 湘潭 411105)
针对当前电力系统中数据采集与监视控制系统(Supervisory Control And Date Acquisition,SCADA)和相量测量单元(Phasor Measurement Units,PMU)并存,以及不同规格的PMU之间不能实现完全同步的现状,引入了一种基于不完全同步PMU的电力系统动态状态估计模型,与SCADA组成混合量测系统,在此基础上提出了一种考虑相位失配量的线性动态状态估计算法.结合线性定常系统卡尔曼滤波原理,分别对相位失配量和系统状态进行滤波处理,实现对系统状态的估计.相比于传统方法,该算法的雅可比矩阵为常数阵,缩短了状态估计时间,减少了不必要的迭代.采用Matlab平台在IEEE 30节点系统上进行仿真实验,结果表明,在PMU不完全同步的情况下,提出的方法较传统的线性算法具有更好的性能,在很大程度上减小了状态估计产生的误差.
混合量测系统;线性动态状态估计;相量测量单元;相位失配量;卡尔曼滤波
电力系统状态估计按方式可分为静态状态估计和动态状态估计两种类型.动态状态估计能实时提供系统运行状态的预测值和估计值,为实现电网实时调度、安全评估和预测控制[1,2]等在线功能提供有效的数据保障,能更好地描述电力系统的本质,因此在近年来受到了广泛关注.但由于存在滤波过程复杂等缺点,故电力系统动态状态估计一直停留在理论阶段,其工程价值还有待考究.
广域测量(Wide Area Measurement,WAM)是近年来发展的一项新技术,其关键在于通过为电力系统提供一个动态交互平台,进而加强了智能电网的安全实时性.相量测量单元(Phasor Measurement Units,PMU)作为WAMS的关键组成部分,能提供高精度的电压、电流量测值,引入PMU为实时监控电力系统动态行为带来了新的思路.PMU提供了一种同步相量测量技术,通过线性模型来进行状态估计,较传统的数据采集与监视控制系统(Supervisory Control And Date Acquisition,SCADA)具有更高的预报率和更快的估计速度,将PMU用于状态估计成为了最近的一个研究热点[3].
可以预见,PMU能解决状态估计中预报精度和计算速度的问题.然而,大规模配置PMU要使用来自多个供应商的PMU,由于每个供应商都采用不同的标准,不同规格的PMU是否能实现同步将是一个棘手的问题.试验表明,来自多个供应商的PMU产生约47 ms的时间同步误差[4],文献[5]表明PMU的同步时钟需精确到500 ns才能为其提供ms级的精度等级,所以PMU的精确性是十分重要的[6].
当PMU不能完全同步,那么考虑相位失配的传统量测模型便不再准确,随着同步误差的增大,传统估计方法会显著恶化.为了解决这个问题,文献[7]定义了一种估计模型,该方法牵涉到另外一个通过xk推出的时延参数tk,最佳的滤波方案是需要计算忽略时延参数的未知状态的后验分布,这是十分困难的.
本文引入了一种考虑PMU的相位失配量的状态估计模型,并提出了运用并行卡尔曼滤波的动态状态估计算法,最后考虑当前电网实际情况,以PMU与SCADA量测构成的混合量测系统下[8]的IEEE30节点系统验证该方法,证实了本文提出的算法较传统算法更具优势,具有很好的应用价值.
1 混合量测系统的构建
1.1 传统混合量测系统
1.1.1 WAMS量测系统 WAMS的量测系统由PMU来完成,它主要测量节点处的电压与相邻支路电流,在t∈R+时刻,支路{p,q}上的支路电流相量为:
(1)
节点p上t∈R+时刻节点电压相量为:
(2)

本文是基于离散时间序列展开的研究,即
其中,T为PMU的刷新周期,k∈N+.在直角坐标系下变换为:
由式(1)、式(2)可以得出,节点电压以及支路电流均为间接量测量,对应的测量方差可以通过文献[9]中提到的间接量测误差公式计算得到.


(3)

为了充分利用其数据,增加冗余度,这里同样采用之前的量测变换技术,将SCADA系统下的节点注入功率量测变换为节点注入电流相量,其变换模型如下:

(4)

由式(3)、式(4)可以得出:等效电流相量同样为间接量测量,也可采用间接量测的误差公式对应的量测方差来获得相应量测量的权重系数.


(5)

1.2 考虑相位失配量的混合量测系统

节点电压与支路电流模型如图1所示,定义节点p侧的电纳为Bp,{p,q}支路的导纳为ypq,电导为gpq,电纳为bpq,这些参数均为已知常数.
节点p在kT+tp,k时刻的电压相量为:
(6)

由于tp,k≪T,式(6)近似成立.
定义相位失配量为θk=2πfctk,延迟电压相量的实部和虚部分别表示为:
(7)
(8)
延迟电流相量的实部和虚部表示为:
(9)
(10)
(11)


2 动态状态估计的数学模型及算法设计
2.1 系统状态和时间延迟的动态模型
2.1.1 系统状态的动态模型 在网络拓扑结构未发生变化的情况下,得出状态变量和混合量测量之间的关系是线性关系,可以用如下随机线性系统来表示动态状态估计问题:
xk+1=Fs,kxk+Gs,k+ws,k,
(12)

2.1.2 时间延迟的动态模型
(1) PMU量测时延模型

tk+1=Ft,ktk+Gt,k+wt,k
(13)
其中,wt,k为以分布式同步机制的拓扑结构为基础的高斯白噪声分布[11].
(2)SCADA量测时延模型
文献[12]为了在状态估计中有效协调SCADA与PMU,通过建立SCADA量测延迟的均匀分布模型来处理各个量测量的不同时延,并分析了各个量测数据所反映的时间断面对状态估计精度的影响,通过量测时延期望值来选择量测量的取用时刻,基本上消除了量测延迟差别对其精度的影响,具体方法可参照该文献.
2.2 动态状态估计的算法设计
卡尔曼型滤波被广泛应用于电力系统状态估计[13,14],用于估计系统状态xk和相位失配量θk.本文的仿真实验表明,将并行卡尔曼滤波(ParallelKalmanFilter,PKF)[9]用于估计上述两个变量,不仅简单易用,而且能产生精确的估计结果.
本文将对双线性混合量测系统中的两个变量,分别进行估计,其方案满足[15]:


(14)
(15)
将考虑相位失配量的混合量测系统分解为系统状态和相位失配量两个子系统,系统状态子系统的模型如式(12)和式(14)所示,相位失配量子系统的模型如式(13)和式(15)所示.将式(13)中的时间单元转换为相位单元,用Fs,k,Gs,k来表示相位失配量的参数矩阵和控制变量矩阵.
根据两个子模型耦合两个卡尔曼滤波器——一个用于估计系统状态,另一个则用于校正相位失配量.
3 仿真实验
3.1 仿真描述
本文在IEEE 30节点系统上进行仿真.系统负荷是按照线性增加的趋势并叠加服从正态分布的随机扰动,其线性变化率介于30%~50%之间,标准差为线性变化率的2%,负荷的功率因数保持恒定不变,系统每10 min实行一次状态估计,并且采用144点的日采样形式.
参数设定:SCADA系统有功和无功功率误差的标准差为0.02,均值为0;PMU幅值的标准差为0.002,相角和支路电流的标准差为0.005[16].两参数的取值通过多次试验优选,得出αH=0.85,βH=0.05最为合适.根据需要,本文配置PMU的节点为IEEE30节点系统中的发电机母线1,2、13,22,23,27和变电站母线10,11,13.
3.2 仿真实例
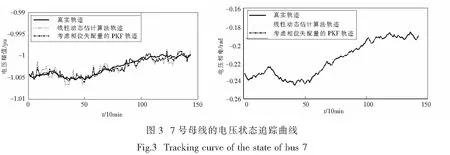
在MATLAB 8.1平台上对本文算法进行了仿真,并将其与线性动态状态估计算法[8](Linear Dynamic State Estimation,LDSE)进行了分析比较.图3给出了上述两种算法在7号母线上的电压幅值和相角的追踪曲线,从图中可以看到,PKF算法较LDSE算法能够显著地提高状态估计的性能,表1为两种方法的比较结果.

表1 两种动态状态估计算法的性能指标比较
4 结论及展望
结合当前研究现状,本文提出了一种新的电力系统动态状态估计算法,引入相位失配量的概念,运用并行卡尔曼滤波算法将相位失配量校正与系统状态估计有机结合,在PMU不能实现完全同步的情况下,保证了动态状态估计的速度和精度.通过仿真实验表明,本文算法能实时追踪电力系统状态,较线性动态状态估计算法可以更加显著地提高估计性能.
[1] 张剑驰, 谢先斌.电力系统测温中光纤光栅的应用研究[J]. 湘潭大学自然科学学报, 2013, 35 (3): 106-110.
[2] 吴亚联, 段斌, 胡洪波, 等.变电站自动化远程通信多粒度访问控制系统设计[J]. 湘潭大学自然科学学报, 2007, 29 (1): 96-101.
[3] 李虹, 李卫国, 熊浩清. WAMS 中计及量测函数非线性项的电力系统自适应动态状态估计[J]. 电工技术学报, 2010, 25 (5): 155-161.
[4] MELIOPOULOS A P. Synchrophasor measurement accuracy characterization[C]//Proceedings of the SynchroPhasor Initiative Performance & Standards Task Team, North Amer: 2007.
[5] KEMA, Inc. Substation Communications: Enabler of automation/an assessment of communications technologies, United Telecom Council: 2006.
[6] BEGOVIC M, NOVOSEL D, DJOKIC B. Issues related to the implementation of synchrophasor measurements[C]// Proceedings of the Annu, Hawaii: 2008.
[7] TOP M,BELL E. Wasynczuk.Observing the power grid: Working toward a more intelligent, efficient, and reliable smart grid with increasing user visibility[C]//IEEE Signal Process, 2012: 24-32.
[8] 卫志农, 李阳林, 郑玉平. 基于混合量测的电力系统线性动态状态估计算法[J]. 电力系统自动化, 2007, 31(6): 39-43.
[9] GLIELMO L,MARINNO P,SETOLA R,et al.Parallel kalman filter algorithm for state estimation in bilinear systems[C]//Proceedings of Decision and Control Conference,1994:1 228-1 229.
[10] 贺觅知. 基于卡尔曼滤波的电力系统动态状态估计算法研究[D]. 成都: 西南交通大学, 2006.
[11] GIORGI G, NARDUZZI C. Performance analysis of Kalman-filterbased clock synchronization in IEEE 1588 networks[J]. IEEE Transactions on Instrumentation and Measurement, 2011, 60(8): 2 902-2 909.
[12] 赵红嘎, 薛禹胜, 高翔, 等. 量测量的时延差对状态估计的影响及其对策[J]. 电力系统自动化, 2004, 28(21): 12-16.
[13] 李大路, 李蕊, 孙元章. 混合量测下基于UKF的电力系统动态状态估计[J]. 电力系统自动化, 2010, 34(17): 17-21.
[14] 赵洪山, 田甜. 基于自适应无迹卡尔曼滤波的电力系统动态状态估计[J]. 电网技术, 2014, 38(1): 3 790-3 794.
[15] BASAR T, OLDSER G J. Dynamic noncooperative game theory[M]. London: Academic, 1989.
[16] SILVA A,FILHO M,CANTERA J M.An efficient dynamic state estimation algorithm including bad data processing[J]. IEEE Transactions on Power Systems, 1987, 2(4): 1 050-1 058.
责任编辑:龙顺潮
Power System Dynamic State Estimation Considering Phase Mismatch
WUYa-lian*,LIGe,LONGHui
(Institute of Information Engineering of Xiangtan University, Xiangtan 411105 China)
Aiming at the coexistence of the supervisory control and data acquisition (SCADA) and phasor measurement units (PMU) available for power system, and inaccurate synchronization is an inevitable problem that large scale deployment of PMUs has to face. This paper introduces a model for power system state estimation using PMUs with phase mismatch to mix with the measurements of SCADA and presents a linear dynamic state estimation (DSE) algorithm considering phase mismatch. Phase mismatch and system state are processed using Kalman filter respectively in the algorithm to estimation the state. The algorithm has a constant Jacobian matrix, shortening the estimated reduction in computation time, and reducing unnecessary iterations. The simulation shows that, in the case of incomplete synchronization PMU, the method presented in this paper has better precision than the traditional linear algorithm, reducing the state estimation error largely.
mixed measurement system; linear dynamic state estimation; PMU; phase mismatch; Kalman filter
2014-11-20
国家自然科学基金项目(61170191)
吴亚联(1973— ),女,湖南 株洲人, 副教授, 硕士生导师.E-mail:yalian_wu@163.com
TM 721
A
1000-5900(2015)01-0087-05
