基于MRAS和ADRC混合无速度传感器PMSM直接转矩调速控制系统研究
2015-04-26栾东雪许鸣珠李申山
栾东雪, 许鸣珠, 李申山
(石家庄铁道大学 机械工程学院,河北 石家庄 050043)
0 引言
永磁同步电机以其卓越的性能优势在现代交流伺服驱动控制中占有重要地位。在PMSM的调速系统中,直接转矩控制[1-3]是继矢量控制后出现的一种新型高性能变频调速技术,它能直接跟踪转矩和磁链,不涉及复杂的电机解耦,响应速度快,且能解决矢量控制中计算复杂、性能易受电机参数变化影响等重大问题。传统的直接转矩控制为实现高精度的速度和位置控制一般采用机械式传感器来测量转子的速度和位置。但机械传感器的存在也会给系统带来很多缺陷和不足,如增加了系统的接口电路,其使用易受温度、湿度等条件的影响,降低了系统的可靠性与稳定性,增加了系统的成本和体积等,这些都不同程度地限制了电机的应用场合。因此,对永磁同步电机无速度传感器的研究已成为现阶段的热点。
近几年,国内外学者就如何辨识电机的转速做了大量的研究工作,使得无速度传感器交流调速有了很大的发展,其中应用模型参考自适应[4-13]系统辩识转速的方法倍受研究人员的重视。MRAS将不含未知参数的方程作为参考模型,将含有待估计参数的方程作为可调模型,两个模型在同时工作时,输出相同物理意义的参量,利用其输出量的差值,并根据适当的自适应律在线实时调节可调模型的参数,以达到被控对象输出跟踪参考模型的目的。MRAS需要准确估计偏差,虽然电机参考模型是精确的,但是估计精度依然受到电机参数变化的影响,无法摆脱对电机参数的依赖性。
自抗扰控制技术[14-18]是一种不依赖系统模型的控制技术,其最大的优点在于它能实时估计并补偿系统的内外扰动总和,具备对参数摄动和扰动变化的鲁棒性。因此,本文给出一种新型的复合控制算法,将ADRC应用到MRAS的永磁同步电机直接转矩调速系统中,可解决MRAS对电机参数的依赖性问题。仿真结果也验证了此种MRAS与ADRC复合永磁同步电机调速控制算法的正确性和有效性。
1 基于MRAS的PMSM无速度传感器控制
采用实际的永磁同步电机作为参考模型,将含有待估算转速和电流参数的电机模型作为可调模型,两个模型同时工作且都输出电流值,根据PMSM实测电流和估算电流的差值来采用适当的自适应律对可调模型中的参数进行实时调节,使估算值跟踪实际值,最终达到电机稳定运行的目的。
永磁同步电机在d-q坐标系下的电压方程[19]为

将式(1)、式(2)进行变换、整理可得无速度传感器控制系统的可调模型为

根据Popov超稳定定理,可得MRAS系统的自适应辨识算法,如下所示

式中,kp、ki≥0;id、iq由电机本身检测后转换得到;、由可调模型计算得到;为辨识的转速为辨识的转子位置。由以上理论可得MRAS系统的结构图,如图1所示。
在Matlab中搭建系统的MRAS仿真框图,如图2所示。

图1 MRAS转子速度和位置辨识框图
2 基于MRAS与ADRC的PMSM无速度传感器控制
2.1 一阶ADRC控制理论
自抗扰控制由传统的PI控制发展而来,通过非线性跟踪微分器(TD)、扩张状态观测器(ESO)和非线性状态误差反馈控制器(NLSEF)能实现更优的控制效果。根据PMSM的特点,采用不含非线性跟踪微分器的一阶自抗扰控制器,鉴于设计的简化性与实用性,再将自抗扰控制器进行线性化处理,此过程的可行性已在文献[20]中进行了详细的论述,且线性自抗扰控制器适于数字化实现,其控制算法具体如下

式中,w*是给定的输入转速信号;w1是一阶TD安排过渡过程后的输出转速;z1是观测的转速输出;z2是ESO观测的系统总扰动,用于系统的前馈补偿,补偿系数为1/b;u0是非线性反馈控制律输出的控制信号;u是经扰动补偿后的控制信号,即输出的给定转矩值;r,β1,β2,β3为线性ADRC的4个可调参数;b是唯一需要参数的量,它表示控制输入的增益,b=npψr/J。

图2 MRAS仿真模型
2.2 永磁同步电机的MRAS与ADRC混合控制算法
ADRC是一种不依赖系统精确模型的现代控制算法,其核心思想是把系统的未建模内扰和不确定性外扰作用都归结为系统的“总扰动”对此进行估计和补偿,使被控对象参数发生变化或遇到未知扰动时都能得到很好的控制效果。MRAS不断地获取系统的状态、性能或参数信息,并将系统当前的性能指标与期望的参考指标进行比较,根据适当的自适应规律来调节控制器的结构、变量、参数等,以实现较优的控制。
永磁同步电机直接转矩无传感器控制系统需要根据当前电机的运行状态估算其转速和转子位置,并且期望该估算过程不受参数、环境的干扰。综合ADRC和MRAS两种控制方法,将其有机整合并用于PMSM转子速度和位置的估算,基于MRAS和ADRC的混合无速度传感器控制结构图如图3所示。
系统由永磁同步电机、逆变器、开关表、磁链估计、转矩估计、扇区判断、MRAS模块、ADRC模块、滞环比较器和坐标变换等组成。控制系统利用MRAS模型得到估计转速,与系统给定转速比较得实际值与估算值的偏差,此偏差经ADRC调节器,其输出作为转矩给定,再与经磁链和电流计算得到的估计转矩一同进入转矩滞环比较器中进行调节。同时系统利用变换得到的电流电压进行磁链估计,结果与磁链的给定值进行比较,差值进入磁链滞环比较器进行调节。最后根据它们的状态选择适当的逆变器开关矢量表,使电机能按要求调节输出转矩,最终达到控制PMSM速度的目的。
3 仿真研究与分析

图3 MRAS与ADRC混合无速度传感器PMSM控制图
本文在Simulink环境中搭建PMSM伺服系统直接转矩控制的调速系统仿真模型[21-22],再将MRAS算法、ADRC算法和MRAS与ADRC相结合的无速度传感器控制算法添加到PMSM的仿真模型中,并进行仿真研究。PMSM参数:定子电阻Rs=3Ω,转子磁链ψf=0.175 Wb,转动惯量J=0.8×10-3kg·m2,粘滞系数B=0,极对数np=3,直、交轴等效电感Ld=Lp=8.5×10-3H。
为检验MRAS速度辨识算法的估计效果和ADRC转速调节器在各速度区的控制性能和抗干扰性,仿真中使永磁同步电机空载启动,给定转速为80 rad/s。0.3 s时突加负载至1 N·m,0.7 s再给定速度阶跃为100 rad/s。
3.1 单一MRAS或ADRC控制算法仿真
首先进行了MRAS无速度传感器和ADRC有速度传感器控制算法的电机直接转矩调速研究,其转速、转矩响应轨迹如图4~图7所示。

图4 MRAS转速响应曲线
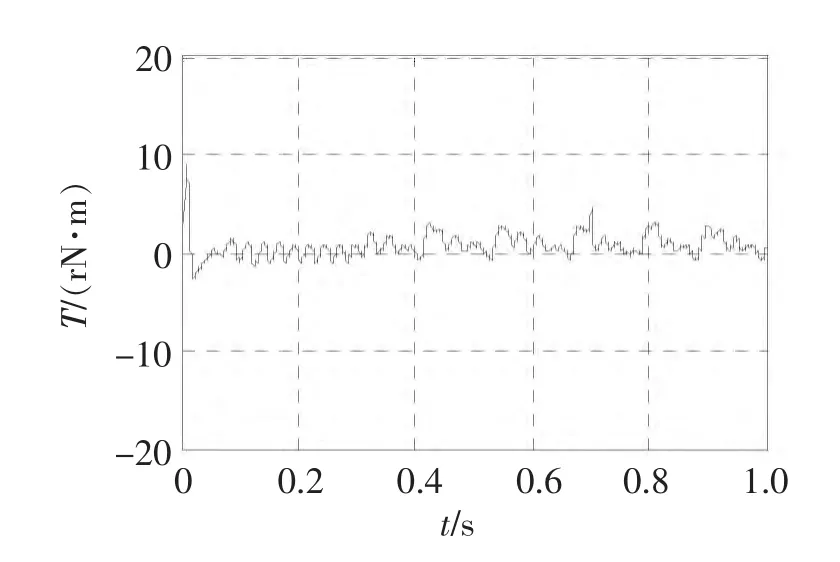
图5 MRAS转矩响应曲线

图6 ADRC转速响应曲线

图7 ADRC转矩响应曲线
图4和图5为PMSM基于MRAS无速度传感器控制的转速、转矩轨迹图,从图上可知,无速度传感器控制系统能基本完成电机调速控制和转矩估计的要求,但是在系统突加负载和改变给定转速时,控制效果一般,曲线波动稍大,这也体现了MRAS算法存在对电机参数依赖性大、抗扰动能力弱的不足;图6和图7为ADRC有速度传感器仿真时的转速、转矩曲线图,由图可得,该算法的抗干扰性和鲁棒性都较强,在电机出现内扰和外扰时,系统都能做出相应的反应和调节,使PMSM克服“总扰动”实现良好的控制效果,但是该算法需要增加速度传感器硬件配置,安装应用系统比较复杂,适用范围有限。
综合分析以上永磁同步电机无速度传感器和有速度传感器调速控制的仿真结果,可以得出无速度传感器和有速度传感器都能基本完成PMSM的调速控制要求,但基于MRAS的无速度传感器控制效果没有基于ADRC的有速度传感器的调速效果好,在整个调速过程中虽能跟踪稳定值,但存在一定的波动,曲线的平滑度也不高。考虑到应用无速度传感器能完全解决安装传感器带来的系统复杂度提高,成本增加,体积加大等问题,电机的无速度传感器调速控制是有一定的优越性的,更重要的是它还能消除传感器对应用场合的限制,增加电机的实用性,因此,本文针对MRAS和ADRC的混合无速度传感器综合调速控制进行了深入研究。
3.2 混合MRAS和ADRC控制算法仿真
通过上述实验仿真和理论分析,已掌握单一两种控制算法的优缺点,为实现高精度、高品质的PMSM调速控制,将两种算法进行有机的整合,并在仿真中进行MRAS与ADRC控制算法的仿真研究。新型复合算法的转速、转矩仿真结果见图8和图9所示。

图8 MRAS与ADRC转速响应曲线

图9 MRAS与ADRC转矩响应曲线

图10 MRAS与ADRC定子磁链轨迹图
从图8和图9可以看出,MRAS与ADRC混合控制算法可使系统的转速响应迅速跟踪给定值,电磁转矩稳态误差控制在很小的范围内。在给定速度发生阶跃变化和突加负载转矩时,曲线略有波动但能较快收敛于新的转速、转矩值,鲁棒性较强,稳态时基本与给定值吻合,由此可得该控制算法能实现较理想的控制效果。除了以上的转速与转矩图外,通过仿真还可以得到PMSM直接转矩控制调速系统的基于MRAS与ADRC混合控制算法的定子磁链波形,如图10所示。
从图10可以看出,PMSM定子磁链轨迹近似为圆形,在电机的转速和负载发生变化时,磁链幅值无明显变化,这表明在整个电机的调速过程中系统性能稳定,能较好地实现PMSM的励磁和转矩解耦,且不需要安装速度传感器,规避了ADRC在安装和实现方面的难题,实现了高品质、高性能的调速设计要求。
4 结论
将基于MRAS和ADRC的无速度传感器调速技术应用于PMSM调速控制系统中,MRAS采用电机的电流模型法,并使用并联结构进行辨识,建立适当的自适应律,能够较精确的估计出转子的速度和位置。该方法弥补了MRAS算法中对电机参数、干扰敏感等不足,使PMSM在某些参数会发生变化的工作环境下也能得到良好的调速效果。仿真结果验证了所提算法的有效性,该混合控制算法控制反应速度较快,动静态性能较好,且抗干扰性和鲁棒性较强,对实际应用具有较好的参考价值。
[1]Pekka Tiitnen.The next generation motor control method,DTC direct torque control[J].Power Electronics,Drives and Energy Systems for Industrial Growth,1996,(1):37-43.
[2]田淳,胡郁文.永磁同步电机直接转矩控制系统理论及控制方案的研究[J].电工技术学报,2001,17(1):7-11.
[3]周扬忠,胡育文.交流电动机直接转矩控制[M].北京:机械工业出版社,2011.
[4]Fan Shicai,Luo Wuqiao,Zou Jianxiao,Zheng Gang.A hybrid speed sensorless control strategy for PMSM based on MRAS and fuzzy control[C]//Conference Proceedings-2012 IEEE7th International Power Electronics and Motion Control Conference-ECCE Asia.Beijing:Institute of Electrical and Electronics Engineers(IEEE),2012:2976-2980.
[5]Wang Lipeng,Zhang Huaguang,Liu Xiuchong.Robust sensorless of ADRC controlled PMSM based on MRAS with stator resistance identification[C]//Proceedings of the 30th Chinese Control Conference.Yantai,2011.
[6]French C,Acamley P.Control of permanent magnet motor drives using a new position estimation technique[J].IEEE Trans.on Ind,1996,32(5):1089-1097.
[7]张双宏,钱祥忠.基于 MRAS的永磁同步电机直接转矩控制系统的研究[J].电子世界,2013(2):37-39.
[8]Meng Zhang,Yongdong Li,Zhichao Liu,et al.A speed fluctuation reduction method for sensorless PMSM in air-conditioners[C]//Proceedings of the Eighth International Conference on Electrical Machines and Systems.Nanjing:IEEE,2005:1633-1637.
[9]Maiti S,Chakraborty C.A new instantaneous reactive power based MRAS for sensorless induction motor drive[J].Simul.Modell.Pract.Theory,2010,18(9):1314-1326.
[10]汤正袆.基于模型参考自适应的永磁同步电机无速度传感器直接转矩控制[J].科技广场,2007(3):19-20.
[11]Choon Hoe Ng,Rashed M,Vas P.et al.A novel MRAS current-based sensorless vector controlled PMLSM drive for low speed operation[C]//IEEE International Electric Machines and Drives Conference.IEEE Xplore,2003:1889-1994.
[12]Jinsong K,Xiangyun Z,Ying W,et al.Dabing.Study of position sensorless control of PMSM based on MRAS[C]//IEEE International Conference on Industrial Technology.IEEE Xplore,2009:1-4.
[13]Madadi H Kojabadi,Ghribi M.MRAS-based adaptive speed estimator in PMSM drives[C]//9th IEEE International Workshop on Advanced Motion Control.Piscataway,N.J:IEEE2006:27-29.
[14]韩京清.自抗扰控制技术[M].北京:国防工业出版社,2008.
[15]韩京清.从PID技术到“自抗扰控制”技术[J].控制工程,2002,9(3):13-18.
[16]刘子建,吴敏,王春生,等.基于自适应观测器和自抗扰控制的PMSM直接转矩控制[J].系统仿真学报,2010,22(11):2702-2707.
[17]孙亮.自抗扰控制技术在交流永磁同步电机伺服系统中的应用研究[D].杭州:浙江工业大学信息工程学院,2010.
[18]孙凯.自抗扰控制策略在永磁同步电动机伺服系统中的应用研究与实现[D].天津:天津大学电气与自动化工程分院,2007.
[19]袁登科,陶生贵.交流永磁同步电机变频调速系统[M].北京:机械工业出版社,2011.
[20]崔晓光.基于自抗扰控制技术的永磁同步电机速度控制研究[D].济南:山东大学电气工程学院,2013.
[21]王成元,夏加宽,孙宜标.现代电机控制技术[M].北京:机械工业出版社,2008.
[22]李华德.交流调速系统[M].北京:电子工业出版社,2003.
