基于蓝宝石加热炉的温度控制系统
2015-04-24刘银法
刘银法, 倪 屹
(江南大学物联网工程学院,江苏无锡214122)
近年来,蓝宝石晶体的需求量大幅度增加,致使蓝宝石的研究和生产具有良好的发展前景[1]。然而,由于晶体生长过程中的不稳定性,导致晶体不能大规模生产或者出现各种缺陷,难以满足市场的要求。这种不稳定性主要体现在不能对温度实现精确控制,故无法采用温度梯度法还是其他方法生长蓝宝石晶体。因此,探讨高精度的温度控制就显得尤为重要。
影响温度控制的因素可以简单地分为电气设备和控制策略两部分。传统的晶体生长炉使用的是可控硅电源,它体积笨重、输入功率因素低、对电网电磁干扰大等缺点并不适合蓝宝石加热炉,文中使用的移相全桥电源则有它不可比拟的优点,如更加省电,效率跟高,体积小等,这些为温度控制提供了良好的电气环境。另外,工业生产过程中广泛应用PID控制策略,但常规PID因为控制算法过于简单,仅仅适用于可建立精确数学模型的确定性控制系统。考虑到蓝宝石加热炉的大滞后性、时变性、非线性和无法获取精确数学模型等特点,文中将模糊控制和常规PID控制器相结合,这样就既有模糊控制无需精确数学模型、控制灵活、鲁棒性强,又有PID控制精度高的特点。仿真实验表明,这种控制策略对加热炉温度控制更加有效。
1 晶体炉温控系统的组成部分
晶体炉的温控系统组成如图1所示。
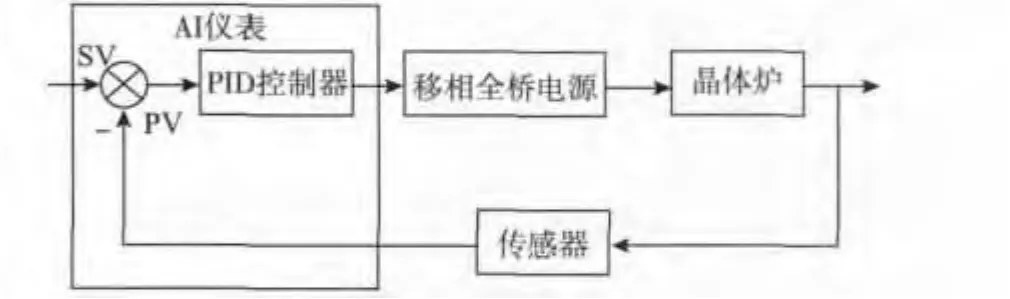
图1 晶体炉温控系统组成部分Fig.1 Crystal furnace temperature control system
图1 中晶体炉的主要控制系统是AI智能仪表,移相全桥电源提供电压电流,另外还有晶体炉、温度传感器等几部分组成。
AI智能仪表采集电流传感器的模拟量信号(此值与晶体炉内温度成线性关系),根据测量值和设定值进行PID调节,输出给移相全桥电源,进而保证炉内温度的稳定;在此基础上通过模拟量的输出改变移相角度以控制功率的大小,实现晶体生长炉的温度控制。
2 控制系统和电源系统
2.1 控制系统配置
在晶体炉中控制系统使用宇电所生产的AI智能温度调节器,它包含高通用性的硬件主板(I/O接口及模块插座、显示接口插座、A/D转换单元及电源单元),通过安装不同的软件及CPU、输入 /输出模块及显示界面,即能适应多种不同功能的过程仪表控制要求,具有无超调、高精度、参数确定简单、对复杂对象也能获得较好的控制效果等特点。
在使用过程中,AI调节器结合PID调节、自学习及模糊控制技术,实现了自整定/自适应功能,做到完成无超调的精确调节,性能远优于传统PID调节器。
在实现温度控制的环节中,温度传感器是提供温度参数的一个重要介质。文中温度传感器利用德国IMPAC生产的双色ISQ5红外测温仪。晶体炉需要两个红外测温仪进行测温,分别放置于炉壁上下的两个测温口。
其工作方式是测温仪模拟量输出4~20 mA给控制器显示温度,达到测温效果。由于实验采用温度梯度法生长蓝宝石,根据其特性设计的石墨加热元件,上下存在温差,利用两个测温仪实时监测,上温控仪起着显示观察作用,而下测温仪进行实时温度控制。
2.2 控制流程
根据晶体炉的控制要求,得到图2所示的系统控制流程。

图2 系统控制流程Fig.2 Flow chart of system control
2.3 模糊PID控制算法
由于晶体炉温度有很大的惯性和一定的滞后性,其滞后效应是影响控制效果的主要因素。系统滞后时间越大,常规PID控制器要获得理想的控制效果就越困难,而模糊控制不需要掌握精确的数学模型,过程的动态响应优于常规PID控制,对被控对象的非线性何时变性具有一定的适应能力。因此,将模糊控制与PID控制器结合能扬长补短,达到良好的控制效果。
2.3.1 模糊PID控制系统结构 模糊PID控制器是一种在常规PID控制器的基础上,应用模糊集合理论,根据控制偏差和偏差变化率在线自动调整比例系数、积分系数、微分系数的模糊控制器[2]。对于加热炉系统,采用二输入三输出的形式:以温度偏差 e和偏差变化率 ec作为输入量,以 ΔKP,ΔKI,ΔKD作为输出,其结构如图3所示。

图3 模糊PID控制结构Fig.3 Structure of a fuzzy-PID controller
2.3.2 模糊PID控制规则 常规PID控制的函数表达式为[3]

将模糊规则和常规PID控制结合,通过图3也可以看出,其函数表达式为
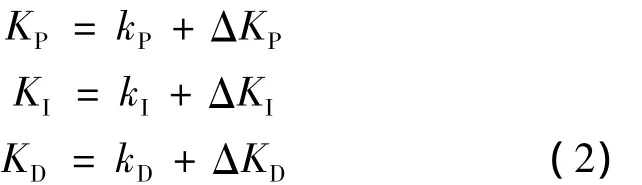
式中:kP,kI,kD为初始的PID参数;ΔKP,ΔKI,ΔKD为经过模糊规则调整的PID参数。
温度控制器将红外测温仪采样得到的温度信号与系统的温度设定值进行比较,得到系统的温度偏差 e与偏差变化率 ec,以此作为输入,ΔKP,ΔKI,ΔKD3个PID调节参数的变化量作为输出。将e,ec和ΔKP,ΔKI,ΔKD的变化范围都定义为模糊集合上的论域:{- 6,- 5,- 4,- 3,- 2,- 1,0,1,2,3,4,5,6},其模糊子集 e,ec和 ΔKP,ΔKI,ΔKD={NB,NM,NS,ZO,PS,PM,PB},e,ec和 ΔKP,ΔKI,ΔKD均服从三角形隶属函数曲线分布。
结合理论分析以及参数KP,KI,KD对系统输出特性的影响关系,在不同的|e|和|ec|时,被控对象对参数 KP,KI,KD的自整定规则为[4-6]:
1)当|e|较大时,为加快系统响应速度,同时避免e突然变大可能引起的微分过饱和,故取较大的KP和较小的KD。为防止积分饱和,一般去掉积分作用,即取KI=0。
2)当|e|和|ec|中等大小时,为使系统响应超调减少,取较小的KP;为保证响应速度,KI和KD应取适当值。
3)当|e|较小时,为使系统具有良好的稳态性能,可取较大的KP和KI;同时为防止系统在设定值左右出现振荡,取合适的KD值。当|ec|较小时,KD取中等大小;当|ec|较大时,KD取较小值。
由以上规则以及工程设计人员的技术和实际操作经验可作出针对KP,KI,KD3个参数的模糊控制规则表,直接引用并存入微机存储器中。系统通过对模糊逻辑规则结果处理,查表和运算,对KP,KI,KD自动调整,可达到PID参数自整定效果。
2.3.3 仿真实验 由于被控对象为电阻加热炉的温度控制系统,是一个非线性、大滞后性、时变性等的复杂系统,可以用一阶惯性滞后环节描述温控对象的数学模型。温控模型的传递函数表示为

文中实验是在Matlab/Simulink环境下对模糊PID控制进行的仿真,利用模糊逻辑工具箱建立模糊控制的模糊推理系统,模糊推理用Mamdani法,隶属函数类型为三角形,解模糊采用centroid法,并利用Toolbox分别搭建模糊PID控制器和常规PID控制器[7]。温度数学模型参数取 k=2.8,T=178,τ=40。在仿真实验中对各输入参数模糊化处理,取 e和 ec的量化因子为 ke=0.1,kec=0.4,比例因子均取 0.1。初始的 PID参数的确定采用Ziegler-Nicholas整定法得到临界比例增益Km和临界周期Tm;再利用经验公式:
KP=0.6Km,KI=1.2Km/Tm,KD=0.075KmTm得到
KP=1.662,KI=0.0277,KD=24.93。模糊PID控制和常规PID控制仿真曲线如图4所示。
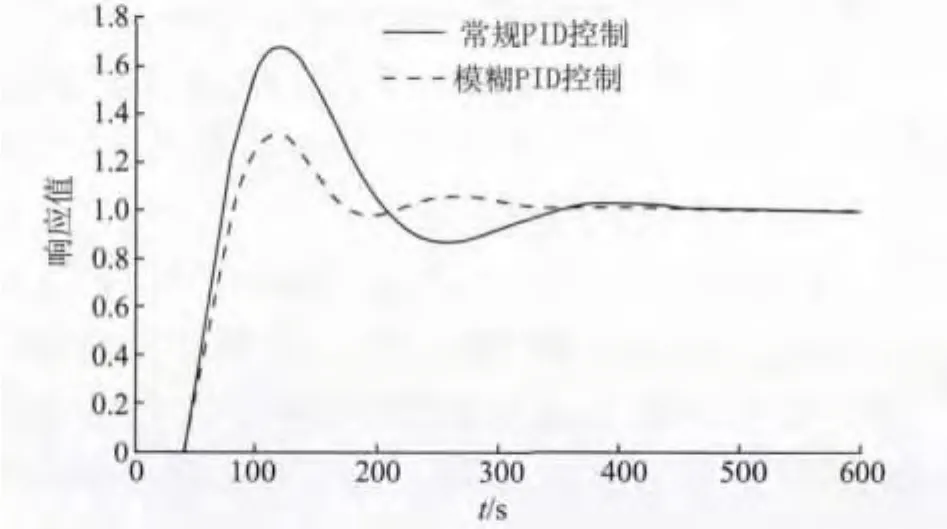
图4 模糊PID和常规PID曲线比较Fig.4 Comparison of the fuzzy PID and the conventional PID
由图4可以看出,常规PID曲线超调量大,调整时间长;而模糊PID控制可有效抑制超调量,稳态误差为零,有良好的控制精度,显著改善了系统控制效果,即可以通过功率的变化体现控制效果。
2.4 移相全桥电源
蓝宝石加热炉使用的电源是移相全桥ZVS软开关电源,因为移相全桥电路工作简单可靠、不需要其他的辅助电路、变压器功率利用率高、易实现软开关,在中大功率应用场合受到普遍重视。
实验中使用石墨加热器,根据石墨加热器的加热原理石墨加热器采用低电压大电流使加热器自身发热,所以电源设计0~30 V,0~3 000 A可调电源。这样充分利用石墨加热器的特性,同时满足蓝宝石加热环境。电源的系统框架如图5所示。
由图5可知,控制器根据温度传感器的检测和反馈给定输出信号,同时驱动IGBT波形的移相角控制输出功率的大小,从而实现晶体炉温度的控制。
3 温控系统的实现
控制系统的完美运行是晶体生长的关键所在,整个系统的调试运行都是在实验室完成的。
在安装好电源系统、真空系统、冷却系统等的前提下,调试运行控制系统,检测系统中每一个功能使之达到系统要求。在不同的阶段可以用不同的温度控制方式。如在加热,退火等阶段可以用功率控制的方式,在生长阶段用温度控制方式。图6为晶体加热生长及降温程序。
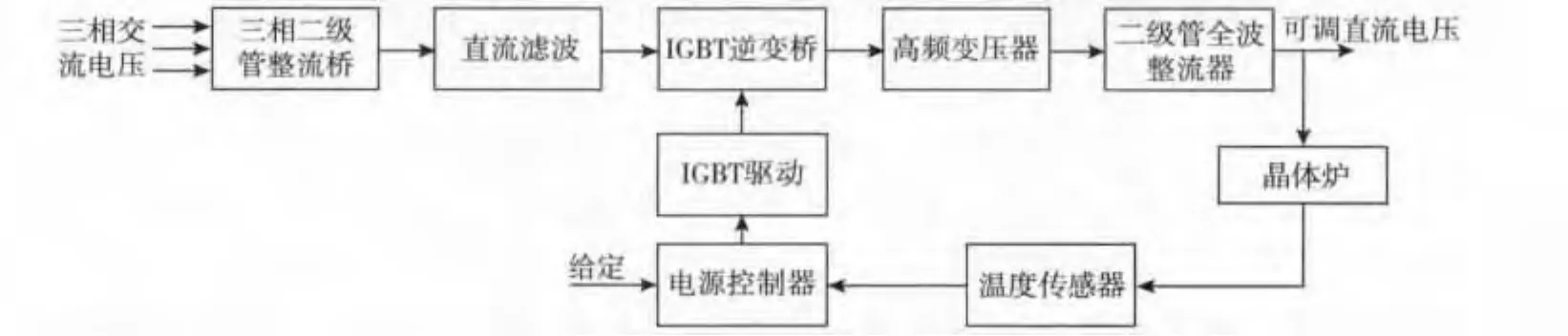
图5 电源系统框架Fig.5 Diagram of the power system
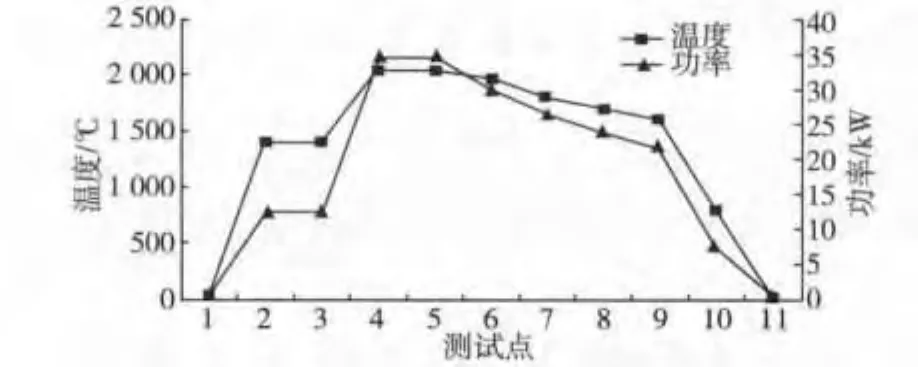
图6 晶体加热生长及降温程序Fig.6 Crystal growth and cooling processes
图6 是不同阶段所需不同的功率,表1为晶体生长过程中各个阶段实际测量的数值。图中只取重要的温度节点,经过长时间的观察,PID调节器自整定后的参数不一定满足控温的要求,再经过多次的实验完善参数配置以达到最优的结果。
4 结语
文中蓝宝石炉的温控系统是基于温梯法上的研究,其简易的操作步骤有别于其他方法的晶体生长[8]。由多次实验数据表明,整个系统的控制精度高,可达到2 000±0.2℃,且控制速度平稳,振荡小,超调小,对于蓝宝石晶体生长是较为理想的温控系统。
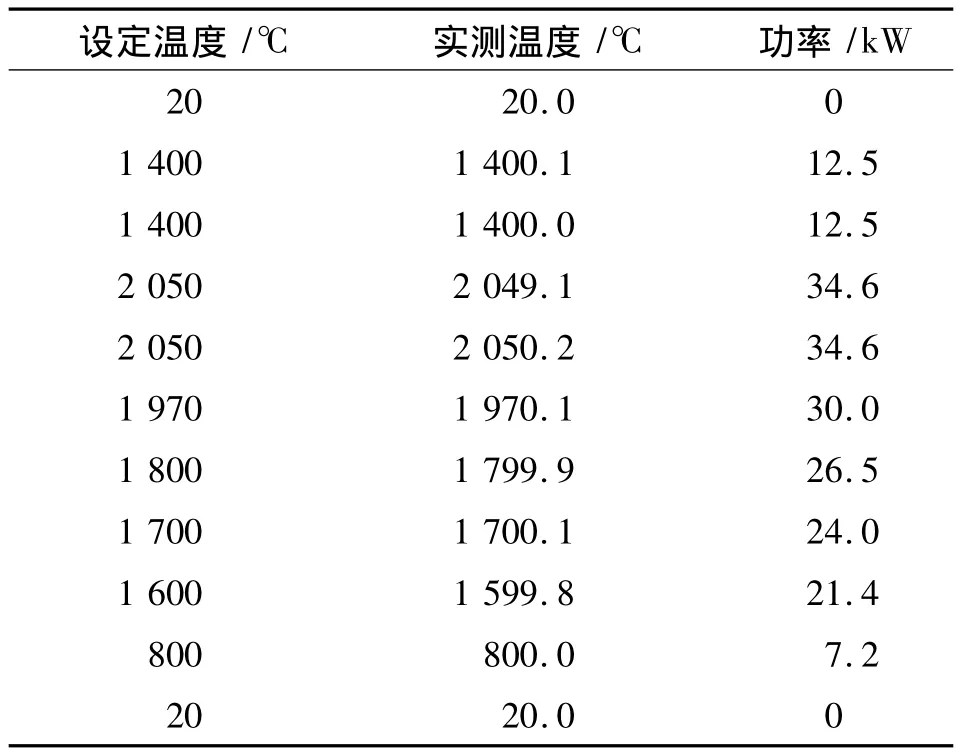
表1 晶体生长实际测量值Tab.1 Measured value of crystal growth
[1]李留臣,冯金生.我国蓝宝石晶体生长技术的现状与发展趋势[J].人工晶体学报,2012,41(S1):221-226.LILiuchen,FENG Jinsheng.Development status and trends of sapphire single crystal[J].Growth Technique in China Journal of Synthetic Crystal,2012,41(Suppl 1):221-226.(in Chinese)
[2]石辛民,郝整清.模糊控制及其MATLAB仿真[M].北京:清华大学出版社,2008.
[3]SHIDequan,GAO Guili,GAO Zhiwei,et al.Application of expert fuzzy PID method for temperature control of heating furnace[J].Procedia Engineering,2012,29:257-261.
[4]曹立学.基于模糊自适应PID的温度控制系统的设计[J].计算机与数字工程,2012,40(6):139-141.CAO Lixue.Design of the temperature control system based on fuzzy adaptive PID[J].Computer and Digital Engineering,2012,40(6):139-141.(in Chinese)
[5]王平法,孙伟旺,于阳阳,等.基于模糊PID算法的电锅炉温度控制[J].机械与电子,2011(5):48-51.WANG Pingfa,SUN Weiwang,YU Yangyang,et al.Electric boiler temperature control based on fuzzy PID algorithm[J].Mechanical and Electronic,2011(5):48-51.(in Chinese)
[6]左帅,和婷,尧思远.基于模糊PID控制的半导体激光器温控系统[J].激光与红外,2014,44(1):94-97.ZUO Shuai,HE Ting,YAO Siyuan.Temperature control system for semiconductor laser based on fuzzy PID[J].Laser and Infrared,2014,44(1):94-97.(in Chinese)
[7]刘金琨.先进PID控制Matlab仿真[M].北京:电子工业出版社,2004.
[8]范志刚,刘建军,肖昊苏,等.蓝宝石单晶的生长技术及应用研究进展[J].硅酸盐学报,2011,39(5):880-891.FAN Zhigang,LIU Jianjun,XIAO Haosu,et al.Research progress growth technique and application of sapphire single crystal[J].Journal of the Chinese Ceramic Society,2011,39(5):880-891.(in Chinese)
(责任编辑:邢宝妹)