面向航天器的体系结构框架设计及应用
2015-04-23从帅军周晓纪
从帅军,任 迪,周晓纪
(1.中国航天系统科学与工程研究院,北京 100048;2.中国空间技术研究院,北京 100094)
随着航天技术的不断发展与应用需求的不断拓展,世界卫星应用进入体系化发展和全球化服务新阶段,我国应用卫星发展也面临着从单星到系列、从系列到体系、从体系向体系优化的发展问题。针对此类大型复杂系统顶层设计问题,利用体系结构理论指导开发正逐步成为热门研究课题。体系结构利用规范化的图形、表格等工具,清晰、直观、形象地描述复杂系统的任务、能力需求、业务活动、系统组成等组成单元,是开展复杂大系统顶层设计的重要手段[1]。由于航天器体系结构设计的复杂性、特殊性,传统开发方法易造成数据不一致、模型构建返工量大、各部门协调性差、全生命周期效能低等问题,不能满足应用导向、系列化、体系化发展的要求,在这一背景下,面向复杂航天器体系结构框架的设计应运而生,它对形成面向复杂航天器体系结构、定性与定量相结合的系统体系顶层设计技术能力有重要意义。
目前,国外典型体系结构框架包括:Zachman框架、DoDAF、MoDAF等[2]。国内关于体系结构框架的研究,大部分是基于DoDAF体系结构框架进行应用研究,这些研究主要关注各自的领域问题,所构建的体系结构主要适用于所研究领域,开发方法不具有普适性,对航天器体系结构构造的参考性低[3-4]。同时,DoDAF体系结构框架模型繁杂,工作量大,在开发上容易造成数据丢失、不一致等问题。还有些学者主要基于DoDAF体系结构框架中作战视角[5]或者服务视角[6]进行应用研究,用于构建武器装备体系等,这也是研究的热点问题,但航天器体系在需求统筹、任务规划、资源部署等方面有别于武器装备体系[7],所以在模型定义、开发方法和开发步骤方面都有待研究。
本文在研究国内外体系结构框架的基础上,结合航天器体系的特点,设计面向航天器的体系结构框架(CSAF),在研究体系结构框架概念数据模型(CDM)的基础上,提出体系结构开发的逻辑顺序,同时基于统一建模语言UML构建海洋卫星对地观测系统体系结构,最后利用仿真验证平台Rhapsody验证模型构建的正确性,从而证明CSAF设计的有效性。
1 面向航天器的体系结构框架(CSAF)设计
1.1 航天器体系的特点
航天器体系是指由若干种不同类型的航天器系统及地面系统组成的有机整体,系统之间相互协作,可对不同用户提供特定功能和服务。
面向业务化应用和综合应用,航天器体系主要有以下特点:
1)航天技术的应用需求多样化,涉及领域广。我国的民用空间系统在国土、测绘、交通、海洋、环保、气象、农业、统计、水利、林业等领域发挥重要作用,据有关统计,仅遥感系统的需求就包括21个领域140余项。
2)为满足各领域应用需求,需要按照“一星多用、多星组网、多网协同、数据集成”的思路进行航天器体系设计和优化统筹,例如,遥感卫星系统包括陆地观测、海洋观测、大气观测卫星星座等,卫星星座在承担各自观测任务的同时,也和其他星座联合组网观测,完成特定任务。由此可见,满足上述要求的航天器体系组成更加复杂,体系结构设计难度大。
3)航天器技术种类多、涉及面广,从研制生产到应用,专业配套和社会协作面广。
4)航天器体系的研制、发射、应用等需要天地一体化协同配合,卫星、空间站等空间航天器的研制应用,和发射场、卫星运控中心、接收站等地面系统的建设必须保持协同发展,构成具有航天特色的体系构建模式。
1.2 构建面向航天器的体系结构框架(CSAF)
面向航天器的体系结构框架是航天器体系结构开发的规范、指南和工具,全面、系统地阐述开发航天器体系结构过程中常用的方法、体系结构视角和模型,为特定任务的体系结构开发和综合集成提供一个共同的基准。
本文按照2+4的视角进行航天器体系结构框架设计,其中,“任务视角、能力视角、活动视角、系统视角”是体系结构框架的主干内容,分别从型号任务、技术能力、业务活动、物理资源等4个方面综合反映体系结构数据;“全景视角、标准视角”是体系结构框架的通用视角,奠定体系结构开发基础和制定航天技术标准。如图1所示。
结合航天器体系的特点,对各视角下的模型进行设计。
1)全景视角:构建概述和摘要信息模型,明确航天器体系设计的背景、研究目的等基础信息,同时构建综合词典,记录构建航天器体系结构采用的术语和缩略词,建立综合词典数据库。
2)标准视角:设计标准配置文件和标准预测两个模型,规范航天器体系结构开发中涉及到的技术标准和非技术标准,同时预测未来对航天器体系设计有影响力的标准。
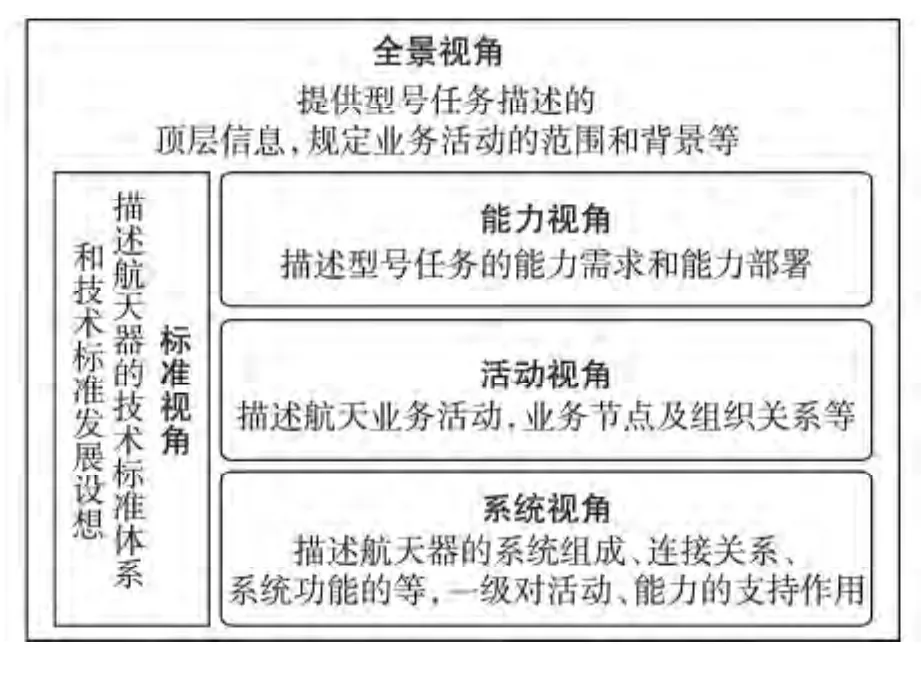
图1 航天器体系结构框架各视角关系图
3)任务视角:任务视角模型是对概述和摘要信息模型中任务背景的扩展,以进一步明确各主体承担的任务。构建使命任务模型和航天职能任务模型,设计航天职能任务对使命任务的支撑模型,明确各类任务的主体,搭建不同领域、不同专业人员之间的沟通联系,使航天技术的应用更具针对性。
4)能力视角:在制定航天器体系的任务后,需要制定航天器体系的业务输出和能力。设计能力构想模型,确定能力开发的战略背景和高层目标;构建能力分类、能力隶属模型,将任务中涉及的各学科、各专业航天技术能力具体化、体系化,以满足航天器体系能力战略需求;在高层目标的驱动下,构建能力阶段划分模型,划分航天器体系能力实现的时间阶段和要求。
5)活动视角:构建活动视角模型,从逻辑层面分析完成任务应当采取的活动,以及满足能力需求的过程信息。首先设计高级活动概念图,划定业务活动范围;然后构建活动节点连接图、活动信息交换矩阵模型,定义活动范围内完成任务的逻辑节点,研究逻辑节点的动作及属性;进而构建活动模型,设计系统完成任务进行的活动;最后构建组织关系模型,明确航天器体系的组织管理模式。
6)系统视角:系统视角是从物理层面对航天器体系的描述,部署支撑完成任务和满足能力需求的物理资源。设计系统组成模型,研究航天器体系的物理组成;构建系统资源流描述、系统资源流矩阵模型,规范物理资源之间的信息交换;根据体系任务,设计系统功能模型、系统度量模型,研究航天器的各项功能以及详细参数,合理规划航天器的使用、设定航天器运行参数,节约运行成本;设计系统技术和技能预测模型,预测分析未来的航天技术对航天器体系的影响。
7)支撑模型和功能性描述模型:航天器体系结构框架中,“任务视角、能力视角、活动视角、系统视角”组成体系结构框架的主干内容,设计视角之间的支撑模型,搭建主干内容之间的联系,形成以任务为目标,以数据为中心的体系结构开发模式。从逻辑和物理层面设计活动视角、系统视角的功能性描述模型,构建活动规则模型和系统规则模型,设定系统运行的业务规则和资源约束;构建活动和系统状态转变描述模型,描述逻辑节点和物理资源对不同事件响应的状态变化,以及构建活动和系统事件跟踪描述模型,用图形化的方式描述系统突发事件对逻辑节点和物理资源的影响。
面向航天器的体系结构框架各视角下模型、模型符号如表1所示。

表1 航天器体系结构框架
2 面向航天器的体系结构框架(CSAF)应用技术
2.1 面向航天器的体系结构框架(CSAF)的概念数据模型(CDM)
CSAF的概念数据模型是对CSAF框架模型中基本元素的完善和扩展,描述框架理论中各视角模型的关键数据元素及其之间的关系,用于制定体系结构框架中模型的构建顺序。
CSAF的概念数据模型包括6个视角中29个关键数据元素,是描述模型的模型,如图2所示。概念数据模型是概念模型,提供如何组织体系结构信息的概念视角,是建立体系结构关键的、共用的、最少的信息基本要素的集合。
2.2 面向航天器的体系结构框架(CSAF)的逻辑开发顺序研究
在分析航天器体系结构框架概念数据模型的基础上,以体系结构数据为中心,根据模型之间的依赖关系,构建航天器体系结构的开发逻辑顺序。首先以概述与摘要模型(QS-1)为起点,再开发体系结构中的其他模型[8],如图 3 所示,RS-3、NS-6、NS-5、XS-5 等支撑模型表示开发两个指向模型后,再联合开发此模型。
3 面向航天器的体系结构框架(CSAF)的应用
本文以海洋卫星对地观测系统为研究对象,以全球海域观测任务为背景,基于UML统一建模语言[9]构建相应的体系结构模型,使用开发软件Enterprise Architect(EA)实现。
3.1 开发任务视角模型,细分型号任务
依据海洋观测系统建设任务,构建航天职能任务模型(RS-2),得出海洋卫星对地观测系统完成全球海域观测任务中的航天职能任务,航天职能任务包括利用卫星支撑海洋防灾减灾、海洋权益维护、海洋环境保护、海域使用管理、海上执法监察、海洋资源调查与服务等6个方面,基本满足应用部门对海洋卫星对地观测数据的要求。
3.2 开发能力视角模型,明确所需的体系能力
海洋卫星对地观测系统体系结构的体系能力体现在海洋卫星有效载荷对地观测能力方面,以完成航天职能任务为目标,构建能力隶属关系模型(NS-4),合理规划航天器体系能力。基于海洋卫星观测任务,从海洋卫星自身有效载荷的性能出发,综合分析海洋卫星有效载荷的对地观测能力,形成海洋卫星对地观测能力群,支持体系完成6项航天职能任务,搭建能力视角和任务视角模型数据之间的关系,如图4所示。

图2 面向航天器的体系结构框架的概念数据模型
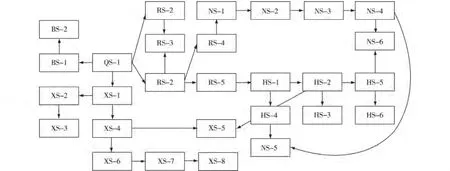
图3 航天器体系结构的开发逻辑顺序图
3.3 开发活动视角模型,梳理系统运行流程
活动视角描述系统运行涉及的各项业务活动,开发活动视角模型,提供满足体系能力需求的过程、信息、实体以及它们之间的互操作性。
1)高级活动概念图(HS-1)
分析航天器体系结构涉及的研究范围,研究体系结构主要的业务活动,基于卫星运行过程、资源配置等活动背景想定,以航天科研院所等6个参与者、以海洋卫星对地观测等9个用例构建高级活动概念图,如图5所示。
2)活动模型(HS-5)
海洋卫星对地观测系统的活动模型建立在对高级活动概念模型分析的基础上,其目的是对系统如何满足任务要求、如何利用物理资源满足能力需求进行逻辑分析。采用带泳道的UML活动图描述活动模型可以明确完成任务所需要采取各项活动的行为主体,如图6所示。
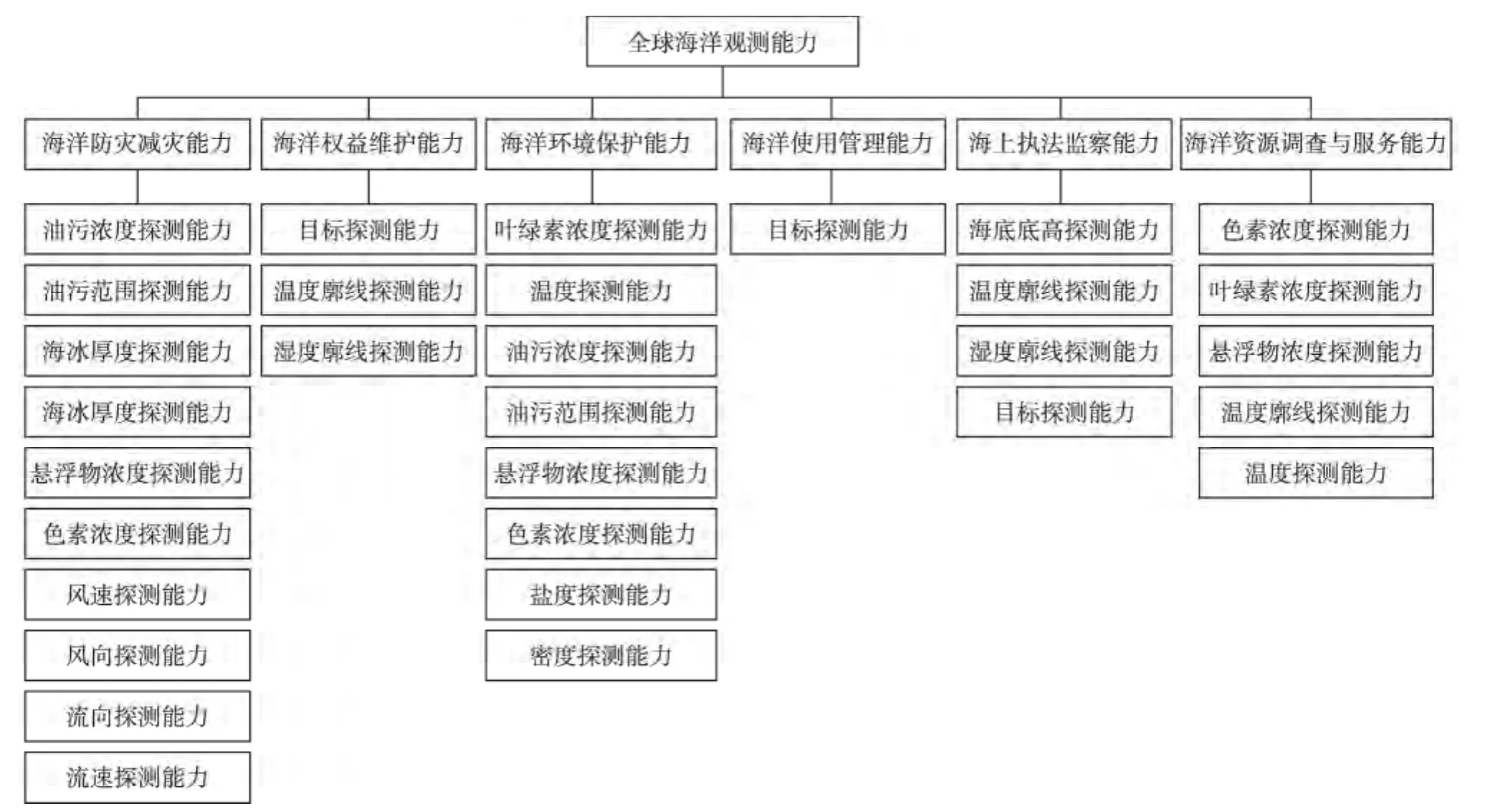
图4 能力隶属关系模型图

图5 高级活动概念模型图
3.4 开发系统视角模型,部署支撑体系能力、业务活动的系统物理组成
通过建立系统模型,研究各组成资源的数据流向、系统功能和系统功能对业务活动的支持等问题,有利于海洋卫星的规划、部署等,有利于分析系统物理资源的变化对海洋卫星全球海域观测能力的影响。
1)系统组成描述(XS-1)
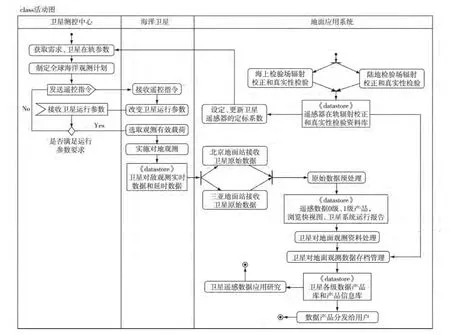
图6 活动模型图
系统组成描述图使用UML组件图来描述,根据研究目的划分研究范围,本文选取遥感卫星主载荷作为对地观测遥感器,选取主服务器作为地面应用系统物理组成,海洋卫星以及地面应用系统均设置必要的接口(供给类和需求类),端口的流向表明系统资源流的流向,如图7所示。
2)系统功能描述(XS-4)
系统功能描述模型通过树状结构图描述系统资源拥有哪些功能,支持系统完成相应的业务活动,在图7的基础上,按照空间系统A、地面应用系统B两方面进行分析,空间系统功能包括有效载荷对地观测功能A1、卫星数据传输功能A2、卫星运行轨道和姿态调整功能A3、卫星数据存储功能A4、卫星通信功能A5等,地面应用系统包括卫星遥控功能B1、卫星数据接收功能B2、卫星数据处理功能B3、数据资料存档分发功能B4、地面系统通信功能B5、卫星载荷辐射校正功能B6等。
3)系统功能对活动追溯矩阵(XS-5)
基于图6,构建系统功能对活动追溯矩阵,以明确完成职能任务所应采取的业务活动对系统物理资源的部署需求,搭建系统视角和活动视角模型数据之间的关系。
如表2所示,矩阵的“列”为图6中活动图的活动单元:发送遥控指令1、接收卫星运行参数2、改变卫星运行参数3、实施对地观测4、地面站接收卫星原始数据5、辐射校正和真实性检验6、原始数据预处理7、对地观测资料处理8、对地观测数据存档9;矩阵的“行”为系统功能单元,(限于篇幅,未列出全部活动单元和功能单元)。
4 基于Rhapsody的模型仿真验证
本文在CSAF框架的指导下构建海洋卫星对地观测系统体系结构,所构建体系结构模型需要基于Rhapsody的仿真验证平台,利用其仿真验证功能,对其模型的正确性和合理性进行验证,从而证明体系结构框架设计的有效性和适用性。
Rhapsody仿真验证平台具有遵循UML2.0的模型驱动开发(MDD)环境,并提供完备的模型验证功能。Rhapsody主要有两种不同的验证方式:1)语法验证,利用代码生成、编译、运行方式检验模型的形式化语法;
2)语义验证,基于人机界面的交互仿真,验证模型的规则正确性、逻辑的可行性[10]。由于Rhapsody本身没有编译器,本文将VC++软件的编译器通过Rhapsody的IDE功能与软件对接,利用VC++的编译器对模型生成的代码进行编译。

图7 系统组织结构示意图
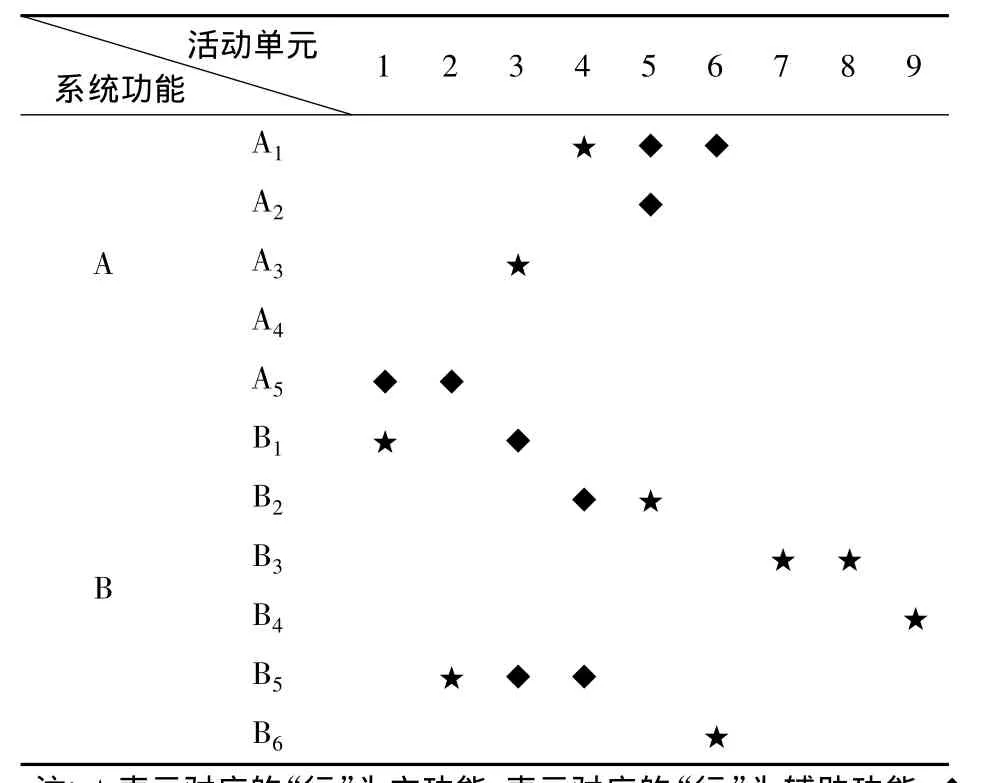
表2 系统功能对活动追溯矩阵示意表
模型的验证是基于用例进行的系统功能性验证,验证构建的系统能否满足用例需求[11],本文选择用例“海洋卫星对地观测”进行模型验证。
1)语法验证。首先基于HS-1模型,在Rhapsody中构建用例“海洋卫星对地观测”,然后对用例进行分析,基于HS-5模型,设计为满足该用例系统需要完成的活动,即构建活动图;基于XS-5模型,设计完成活动所需要的系统组件,即构建组件图;使用Rhapsody的SEToolkit组件对活动图生成代码,并通过VC++进行编译,进行形式化语法和语义的检测,结果会在Rhapsody操作界面显示出来,如图8所示,语法和语义正确表明编译成功,进入下一步。
2)语义验证。基于构建的状态图、组件图,使用组件SE-Toolkit生成用例“海洋卫星对地观测”的顺序图,描述为完成该用例系统需要和参与者之间进行交互的消息、系统操作,即状态图运行的仿真顺序图,如图9所示,检查生成的仿真顺序图,对比系统实际运行的分析顺序图,得知模型设计准确,从而证明CSAF框架设计的有效性。
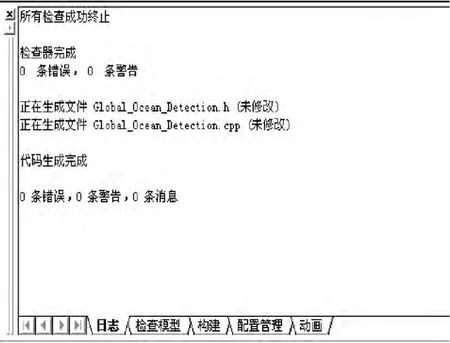
图8 语法验证结果图
5 结束语
本文基于体系结构框架理论,提出面向航天器的体系结构框架(CSAF),选取7个模型用于构建海洋卫星对地观测系统体系结构,从任务、能力、活动、系统等视角描述系统的组成单元,并构建了各组成单元之间的关系,使得海洋卫星对地观测系统形成一个有机整体,并通过Rhapsody仿真验证平台验证了模型的正确性,从而证明了CSAF框架设计的有效性。实例证明,针对大型航天复杂系统,应用CSAF理论,可以从不同视角描述复杂系统,为航天器体系的分析、设计、研发和应用等奠定基础,也提高了航天器体系的可重用性和可维护性。
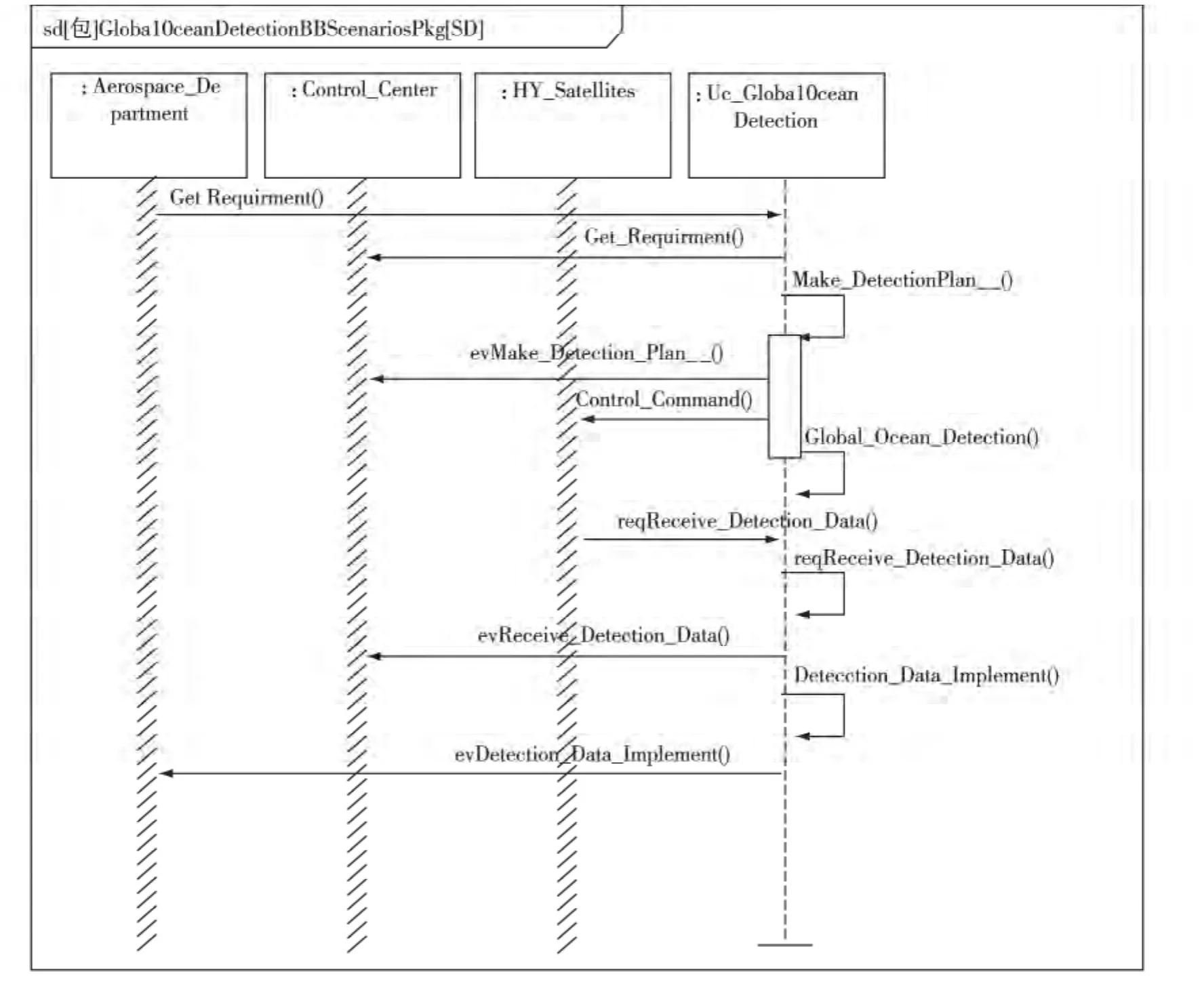
图9 语义验证结果图
[1]梁振兴,等.体系结构设计方法的发展及应用[M].北京:国防工业出版社,2012:19-20.
[2]DoD Architecture Framework Working Group.DoD architecture framework[R].Version 2.0.May 2009.
[3]芮平亮,傅军.面向网络中心化信息系统的体系结构描述框架[J].指挥信息系统与技术,2012(3):6-10.
[4]李龙跃,刘付显.DoDAF视图下的反导作战军事概念建模与仿真系统设计[J].指挥控制与仿真,2012(5):76-80.
[5]王明贺,刘建闯,汪洋.基于DoDAF的作战能力视图研究[J].兵工自动化,2012(3):1-4.
[6]王磊.C4ISR体系结构服务视图建模描述与分析方法研究[D].长沙:国防科技大学博士论文,2011.
[7]舒宇.基于能力需求的武器装备体系结构建模方法与应用研究[D].长沙:国防科技大学博士论文,2009.
[8]Wang Weikui,Zhao Boqiang.Research on Construction Method of DoDAF View based on DEVS and SysML—2012 World Automation Congress[C].Mexico,June,2012:24-26.
[9]John C.Zubeck.Paring UML And DoDAF Down To The Project-Vital Set Of Diagrams—3rd Annual IEEE International Systems Conference[C].Canada,March,2009:23-26.
[10]谢娟.基于DoDAF的无人机飞行管理计算机系统体系结构研究[D].南京:南京航空航天大学硕士论文,2010.
[11]倪忠建,等.模型驱动的系统设计方法应用研究[J].航空电子技术,2011(1).
