路内停车车辆比例系数对交通流的影响研究
2015-04-21韦兰香梁玉娟钟友坤
韦兰香,梁玉娟,钟友坤
(河池学院 物理与机电工程学院,广西 宜州546300)
随着社会经济的快速发展,人们的物质生活水平也得到了较大提高,越来越多的私家车进入了普通家庭,近几年来增长速度尤其迅猛。虽然机动车给人们的出行带来了方便,却也使人们面临着越发突出的“停车难”问题。目前,我国许多城市因停车用地少,路外停车设施严重短缺,停车泊位不能满足现实需要,而普遍采用路内停车方式来停车。路内停车通常占用一部分机动车道、慢车道(或巷道)或人行道,具有停车方便、周转快等优点,因此利用率较高。另一方面,路内停车削弱了道路的通行能力,降低了车辆的行驶速度。路内停车对交通流产生负面影响的原因较多,其中一个重要的影响因素是路内停车车辆占道路总车辆的比例系数。
交通流的宏观特征一般用流量、密度和速度三个变量来描述。流量是单位时间内通过某一地点的车辆数,即车辆密度和速度的乘积。实测研究显示流量-密度、速度-密度之间存在某种关系,这些关系被称为基本图。基本图对交通流的研究具有重要意义,它给出了交通流的许多信息,例如自由运动的速度、阻塞密度、波动速度和道路通行能力等。
元胞自动机交通流模型是定义在一个由具有离散、有限状态元胞组成的元胞空间上,并按照一定的局部规则,在离散的时间维度上演化的动力学系统。其强大的复杂计算功能、固有的并行计算能力、高度动态特征以及高度灵活性等特征,使得它在模拟复杂的交通运输系统时空动态演变方面具有强大能力,而NaSch模型是最重要的一维元胞自动机交通流模型之一。
为讨论路内停车车辆占道路上总车辆的比例系数对交通流的影响,以NaSch模型为基础,建立带有路内停车带的路段车辆交通流模型,并用计算机进行数值模拟,分别从流量-密度基本图、速度-密度基本图和时空演化斑图来分析道路停车车辆的比例系数对道路交通的影响。
1 建立模型
图1为一典型的路内停车路段示意图,在图1中路段为单向单车道,路侧有停车带。路段中有行车道和停车带,其中A为行车道上的车辆,B为停车带上的车辆。
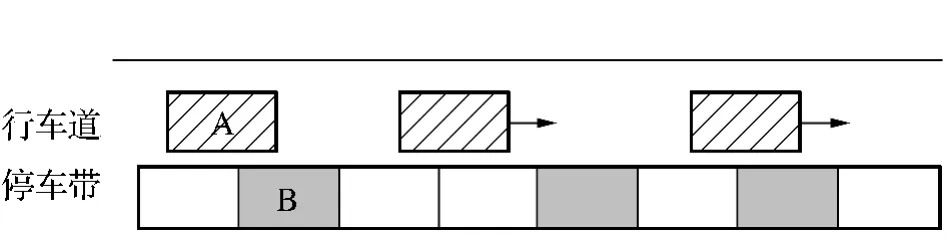
图1 带有路内停车带的单向单车道路段示意图
本文中的路段模型如图2所示。用一个一维点阵代表一条单车道,即行车道由1 000个元胞构成,道路长度为L,每一个元胞对应的实际道路长度为7.5m。每一个元胞在每一时刻都处于空闲或容纳一辆车的状态。行车道上的车辆自左向右行驶,有斜线的元胞为容纳一辆车的状态,空白元胞为空闲状态。第530个元胞为正在停车车辆的位置Lb,第600个元胞为路内停车带的终止位置Ls,La为停车带的长度。系统采用周期性边界条件,从左向右行驶车辆,当驶出右边界后,从左边界重新进行。路段中只有一部分区域设有路内停车带。停车带也由元胞构成,灰色元胞为停有一辆车的状态,空白元胞为空闲状态。
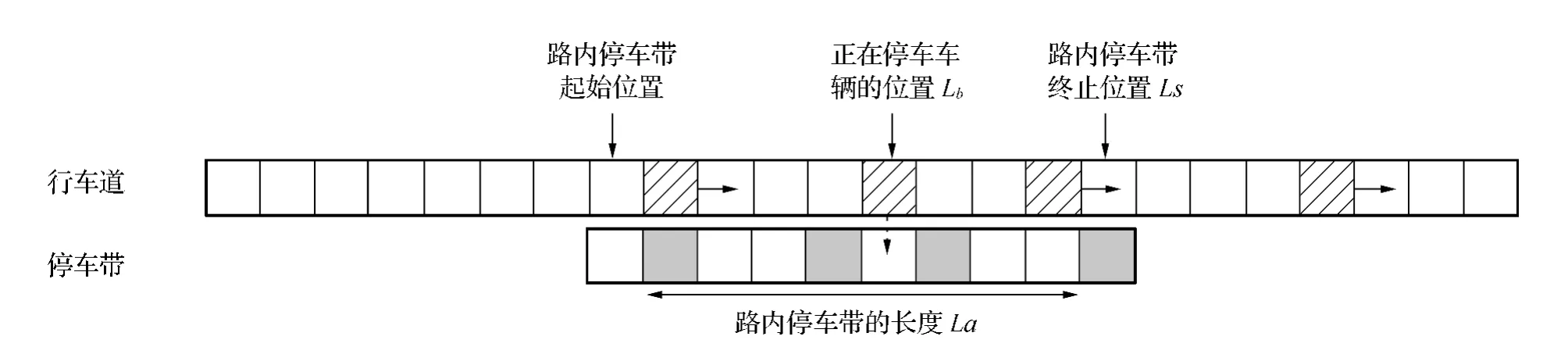
图2 带有路内停车带的路段模型示意图
1.1 前方无停车车辆停车时车辆的运行规则
车辆行驶在设有路内停车带的区域内时,若前方无车辆正在停车,则根据车间距按NaSch模型演化规则来确定其行驶速度。
1.2 前方有停车车辆停车时车辆的运行规则
车辆行驶在设有路内停车带的区域内时,若前方有停车车辆正在停车,则必须停车等待,当等待时间超过停车车辆所需停车时间,则根据车间距按NaSch模型演化规则来确定其速度行驶。
1.3 修正NaSch模型的演化规则
本文对NaSch模型进行一些修改,即在其演化规则的基础上,加上了确定车辆的延迟概率和时间反馈的两点规则。用T,f,νmax和P分别表示停车车辆在停车过程中所需的时间、停车车辆的比例系数、车辆行驶的最高速度和随机延迟概率,νn(t)和xn(t)分别为车道上第n辆车在t时刻的速度和位置,xn+1(t)为车道上第n+1辆车在t时刻的位置,gapn(t)=xn+1(t)-xn(t)-1为t时刻第n辆车与前方紧邻车辆间的元胞数,ts为停车等待时间的积累。在实际交通中,车辆在侧方位停车时,要耗费一定的时间,为便于分析,停车车辆在停车时的速度取0。本文中修正的NaSch模型演化规则可表示为:
1)确定车辆的延迟概率p:在带有路内停车带的路段上行驶的车辆,延迟概率取较大值P0=0.8,在其他情况下,取较小值P=0.25;
2)确定性加速过程:vn(t)→min(vn(t)+1,vmax);
3)确定性减速过程:vn(t)→min(vn(t),gapn(t));
4)以概率p随机减速过程:vn(t)→max(vn(t)-1,0);
5)位置更新过程:xn(t+1)→xn(t)+vn(t);
6)时间反馈:若(xn(t)=Lb且ts<T),且为停车车辆时,有ts=ts+1;否则ts=0。
2 数值模拟与分析
设道路上总共有N辆车,每一辆车的状态由该车的速度v来表示,v∈[0,vmax],即速度可在0与最高车速间取其中一值。取vmax=3cell/s(每秒3个元胞),即最高车速为64.8km/h。行车道上的车辆密度平均车流量J=ρv¯,而车辆的平均速度可通过对样本求平均得到,其计算公式为
在数值模拟计时开始时,使车辆以一定的比例、一定的车辆密度(ρ)随机分布在一维(1 000个)元胞链L上,其中停车车辆占总车辆的比例为f。每一次运行取40 000时间步进行数值模拟,为消除影响,开始的20 000时间步不进行统计,20 000时间步以后的每一时间步对速度νn(t)进行统计,而每一次运行的平均速度是将经过20 000时间步的速度对时间求平均。考虑到存在随机问题,为减小随机误差,共运行10次,再对10次运行取平均值。
为研究周期边界条件下不同停车车辆的比例系数f对交通流的影响,取停车车辆停车过程所需时间为T,改变停车车辆的比例系数f进行数值模拟。对单向单车道车辆停车过程所需的时间T进行交通实测,发现车辆在路内测方位停车时,对道路后方车辆会造成堵塞,时间约为10s,在进行数值模拟时,T取10s。
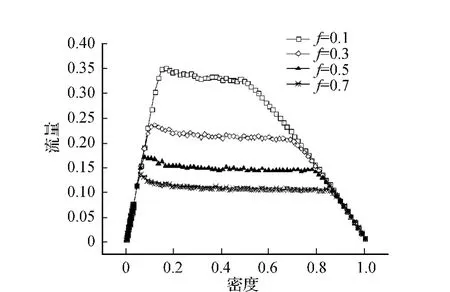
图3 不同停车车辆比例系数f的流量-密度基本图(P0=0.8,P=0.25,T=10s)
2.1 流量-密度基本图分析
模拟得到的流量-密度基本图,如图3所示。图3显示,模型在P0=0.8,P=0.25,T=10s时,车辆密度较小,流量会随密度呈线性增加;当密度不太小也不太大的时候,流量随密度的变化关系出现了流量不随密度变化的平台区域;而在密度较大时,流量随密度的增大呈线性减小的模拟结果与实际交通情况相符合。当道路车辆的密度较小时,车辆数目较少,车辆间的相互影响小,车辆处于自由行驶状态,平均速度大,对应的流量也大;当车辆密度不小也不大时,道路上出现的车辆数目增多,车辆间的相互影响增大,平均速度随密度增大而下降,这时流量的变化并不大;当密度较大时,车辆数目多,车辆间的相互影响也变得较大,这时又受到停车时间的影响,车辆的平均速度趋向于0,导致车流量也很快下降,并趋向于0。
从图3还可以发现:f的取值对模拟道路的通行能力影响非常大。车辆的流量大小因取定停车时间而取决于停车车辆比例系数的大小。随着停车车辆比例系数的增加,车辆在前进过程中受阻程度也随之增大,对应的最大流量值逐渐减小。当停车车辆占总车辆数的10%、30%、50%、70%时,对应的最大流量值分别为0.35、0.24、0.17、0.14。
2.2 速度-密度基本图分析
模拟得到的速度-密度基本图,如图4所示。
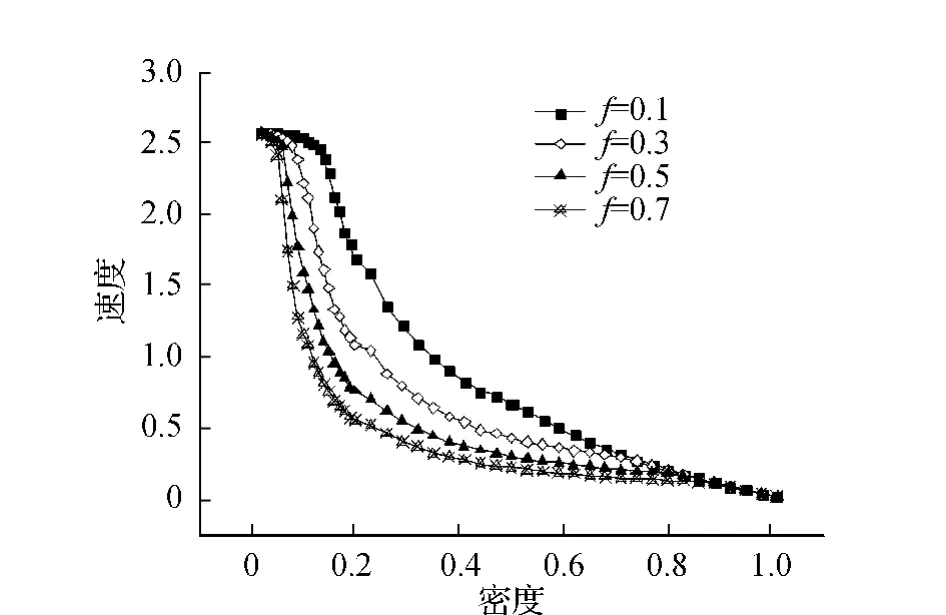
图4 不同停车车辆的比例系数f的速度-密度基本图(P0=0.8,P=0.25,T=10s)
由于研究的车辆是在单向单车道上行驶的,而且车辆停车过程要耗费一定的时间,若是车辆正在进行路内停车行为时,其后正在行驶的车辆就必须减速甚至停车等待,使得道路上的车辆平均速度下降很快。随着停车车辆比例系数f的增加,平均速度下降得更多,此外,随着车辆密度的增加,平均速度趋向于0,这样就出现了交通堵塞,造成道路通行能力下降。
2.3 时空演化斑图分析
图5为正在停车车辆所在位置前后300个元胞(取定道路车辆密度为ρ=0.1,停车车辆停车过程所需时间为T=10s)的时空演化斑图。图中横轴为车辆所在位置,纵轴为时间,黑色位置表示元胞内有车,白色位置表示元胞内无车。
由时空演化斑图可以看出,粒子分散较均匀,说明当车道上的车辆密度较小,且停车车辆的比例系数也较小时,道路畅通,出现畅行相,如图5(a)所示。随着车道上停车车辆比例系数f的增加,粒子分散越来越不均匀,在停车车辆所在位置(第530个元胞)及其附近出现了比其他位置更黑的区域,如图5(b)、图5(c)、图5(d)所示,说明这里的车辆数目较多,出现了拥堵现象。比例系数f越大,拥堵的范围就越宽,说明停车车辆的比例系数是影响道路通行能力的重要因素。
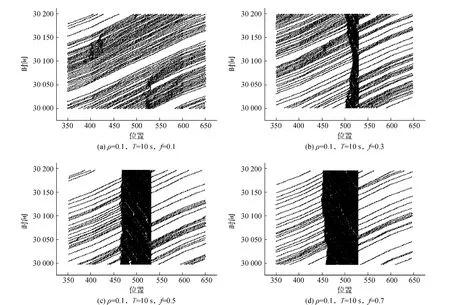
图5 正在停车车辆所在位置前后300个格点的时空演化斑图
3 结 论
通过以上分析可知,由于路内停车带的设置,使得道路车流量减小,车辆的平均速度下降,甚至会造成交通堵塞。而路段上停车车辆的比例系数越大,对交通流的影响就越大。数值模拟的结果与实际交通状况相符合,能为路内停车带的合理设置提供依据。
数值模拟的结果显示,当取定道路车辆密度为0.1、车辆停车过程所用时间为10s、停车车辆的比例系数在0.15以下时,道路能保持畅通,若比例系数在0.15以上,就会出现不同程度的局部拥堵现象。因此,路内停车带的设计应考虑到交通流量、车道数、道路宽度等因素,凡是对交通的通畅产生较大影响的地点,不应设置路内停车带。
[1] 刘小明,王力.考虑路内停车的元胞自动机交通流模型[J].吉林大学学报:工学版,2012,42(2):327-333.
[2] 郭四玲.元胞自动机交通流模型的相变特性研究和交通实测分析[D].南宁:广西大学,2006:15-22.
[3] 梁玉娟.基于弯道影响的交通流特性研究[J].公路,2011(3):115-117.
[4] 耿克姣.城市路内停车的必然性和供求规划模型分析[J].交通标准化,2013(3):42-43
[5] 薛郁,董力耘,戴世强.一种改进的一维元胞自动机交通流模型及减速概率的影响[J].物理学报,2001,50(3):445-449.
[6] 胡兵,聂华波.关于路内停车问题的反思[J].交通标准化,2007(1):91-94.
[7] 刘章.交通流宏微观模型在城市道路交通中的应用及实测分析[D].南宁:广西大学,2008:10-19.
[8] 朱彤.电动自行车交通安全优化措施研究[J].交通科技与经济,2014,16(1):92-94.
[9] 赵顺,刘小勇,关雅丽,等.城市信控交叉口机动车交通影响评价[J].交通科技与经济,2015,17(4):56-59.
