基于改进模糊PID算法的智能铲运机自主行驶控制方法
2015-04-17龙智卓顾洪枢冯孝华
龙智卓,战 凯,顾洪枢,石 峰,郭 鑫,冯孝华
(北京矿冶研究总院,北京100160)
基于改进模糊PID算法的智能铲运机自主行驶控制方法
龙智卓,战 凯,顾洪枢,石 峰,郭 鑫,冯孝华
(北京矿冶研究总院,北京100160)
针对智能铲运机在井下环境中的自主行驶问题,在现有基础的多变量PID算法和传统的模糊PID算法基础上,设计了改进模糊PID算法。改进模糊PID算法引入权重协调航向角控制器和横向偏差控制器对输出转向角的影响。建立铲运机自主行驶的SIMULINK仿真模型。仿真结果表明,改进模糊PID算法在响应时间、超调量以及稳态误差等方面相比于多变量PID算法有较大优势。
智能铲运机;自主行驶;改进模糊PID算法
铲运机作为一种地下采矿的运输设备,目前在国内外矿山中有广泛的应用。当前对铲运机的智能化、自动化的研究是当前铲运机的主流研究方向。在此背景下,国家高技术研究发展计划(863计划)项目“地下智能铲运机”应运而生。本文主要研究的是智能铲运机的自主行驶控制算法,旨在解决铲运机在井下自主行驶问题。
1 智能铲运机自主行驶控制策略
铲运机自主行驶过程中,目标路径是巷道中心线,铲运机保持一定的安全角度和一定的安全距离。从图1中可以看出,使铲运机保持安全角度就是跟巷道侧壁平行,即保持航向角偏差β=0,因此需要对航向角进行控制。而保持安全距离就是跟巷道侧壁保持一定的距离,即保持横向位置偏差δ。这里设行驶速度在巷道中恒定,对转向角α的控制来实现这两个目标(航向角偏差和横向位置偏差)在一定范围内[1-4]。

图1 铲运机行驶轨迹偏差图Fig.1 Trajectory deviation of LHD
2 模糊PID控制方法
在设计铲运机的控制系统时,由于铲运机是一个具有时变性、非线性和不确定性的被控对象,多变量PID控制器的三个系数固定难以取得较好的控制效果。因此PID控制器的系数应该在不同的工况下相应变化。设计PID控制器具有系数自适应功能,利用模糊控制规则实时地对PID系数进行修正,产生了模糊自适应策略。模糊PID控制器是分别以铲运机的横向位置偏差δ和变化率、航向角β和角变换率作为输入,以前后车体转向角α作为输出,利用模糊规则对比例、积分、微分系数进行在线调节,以满足不同时刻对PID系数自动调整的要求。从而使控制器具有一定的自适应能力,获得良好的控制效果。

式中:kpδ、kiδ、kdδ分别为横向位置偏差输入的比例、积分和微分系数,kpβ、kiβ、kdβ分别为航向角偏差输入的比例、积分和微分系数。
在常规PID控制的基础上,运用模糊控制策略设计了两个模糊控制器,如图2所示。在图2中一个模糊控制器是以横向位移偏差δ和变化率作为输入。通过模糊推理,找出PID三个系数kpδ、kiδ、kdδ与δ和之间的模糊关系,在运行中不断检测δ和,根据模糊控制原理不断对三个系数进行调整和修改。同理航向角偏差控制器原理也是如此。该模糊PID控制器设计按文献[5-7]要求设计。

图2 模糊PID控制结构图Fig.2 The structure of fuzzy-PID control
3 改进模糊PID控制方法
但是由于航向角偏差、航向角偏差变化率与横向位置偏差、偏差变化率随着铲运机的运动对转向角控制的影响程度不一,所以对基本的模糊自适应PID进行改进。设计了一种权重输出器,给横向偏差的模糊PID输出加上一个权重a。铲运机的位置随着其行驶实时变化,也就是说铲运机的横向位置偏差和航向角偏差一直变化。如果设置一个不变化的权重,其无法适应变化的环境。于是设计了一种基于模糊控制规则的权重输出器调节权重。原理如式(2),结构如图3。
权重输出器的设计原理类似于人工对车辆进行驾驶。人在驾驶时,正常情况一般考虑的是车偏离跑道中央的距离和车偏离正常行驶方向的角度,这就类似铲运机的横向位置偏差和航向角偏差。权重输出器的模糊规则就是建立一个类似人工驾驶经验规则。当驾驶时,车偏离跑道中央很大距离时,这时首先考虑的是距离偏差对车安全的影响,当车偏离跑道距离不大,而偏离正常行驶角度很大时,这时候就应该首先考虑角度对车安全的影响。而铲运机的权重输出器的原理基本如此,是基于经验的一种规则。输出的权重是用来调节航向角偏差模糊控制器的输出和横向位置偏差模糊控制器输出间的大小关系,类似于驾车先考虑距离还是角度因素对车的安全影响最大。

图3 改进模糊PID控制结构图Fig.3 The structure of improved fuzzy-PID control
权重输出器的输入为横向偏差和航向角偏差,输出为权重a,其基本原理是一个两输入、单输出的模糊控制器。
设定输入航向角偏差β量化到[-1.5,1.5],对应的模糊子集为{负大,负中,负小,零,正小,正中,正大},记为{NB,NM,NS,Z,PS,PM,PB};输入变量横向偏差δ量化到[-0.8,0.8],对应的模糊子集也为{负大,负中,负小,零,正小,正中,正大},记为{NB,NM,NS,Z,PS,PM,PB};输出变量a量化到[0,0.8],对应的模糊子集均为{零,小,中,大},都记为{Z,S,M,B}[8-10]。
输入变量β和δ以及输出量a的隶属度函数,其中β和δ头尾采用梯形函数,其余模糊量均采用三角形函数表示,将输入变量航向角偏差语言值进行了不规则划分。模糊控制器采用Mamdani法,解模糊采用重心法,模糊规则如表1。
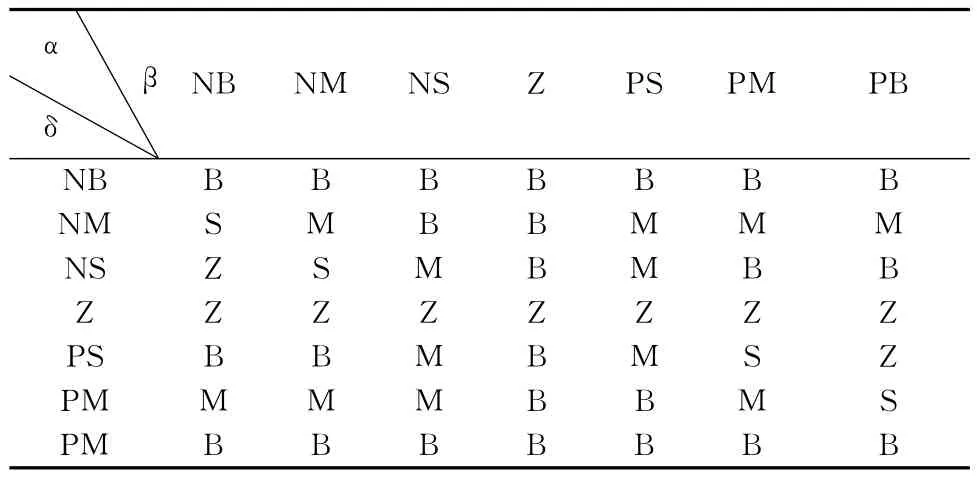
表1 权重输出器模糊规则表Table 1 Fuzzy rules table of weight coefficient
4 仿真环境的搭建及结果
仿真模型在MATLAB/SIMULINK图形仿真环境下建立,考虑到自主导航行驶过程中,铲运机行驶速度变化很平稳,可视为行驶速度恒定,设铲运机以10km/h的速度行驶,即2.8m/s,只通过控制铲运机的转向角度来实现对运动轨迹的精确控制,铲运机前后桥至中央铰接处的距离皆为1.27m。在MATLAB/SIMULINK中建立多变量PID控制器、模糊PID控制器以及加入了权重输出器改进模糊PID控制器的铲运机控制模型。图4是改进模糊PID控制器SIMULINK模型,其中子系统是铲运机的运动模型,其建立基于文献[11]的运动学分析,图5是子系统的SIMULINK模型。
4.1 阶跃输入响应比较
分别对多变量PID、模糊PID和改进模糊PID控制算法进行阶跃输入响应比较,车速为常数v=2.8m/s。
1)横向位置偏差初始值为0.8m,航向角偏差初始值为57.2°时的跟踪曲线见图6。上图是航向角跟踪曲线,下图是横向位置跟踪曲线。

图4 改进模糊PID控制器SIMULINK模型Fig.4 The SIMULINK model of improved fuzzy-PID algorithm

图5 改进模糊PID控制器SIMULINK子系统Fig.5 The subsystem of improved fuzzy-PID algorithm
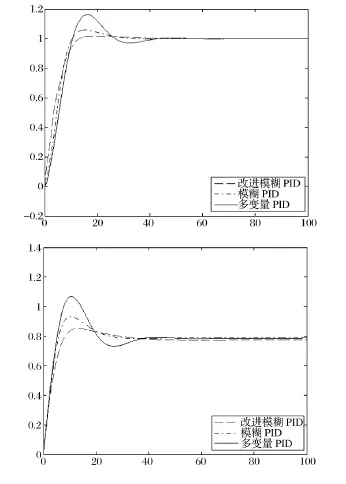
图6 阶跃输入响应比较图Fig.6 The step input response comparison
2)横向位置偏差初始值为0.8m,航向角偏差初始值为-57.2°时的跟踪曲线见图7。上图是航向角跟踪曲线,下图是横向位置跟踪曲线。

图7 阶跃输入响应比较图Fig.7 The step input response comparison
4.2 圆轨迹跟踪比较
分别对多变量PID、模糊PID和改进模糊PID控制算法进行圆轨迹跟踪比较,设车速为定值2.8m/s。
1)横向位置偏差初始值为0m,航向角偏差初始值为68.75°时的轨迹跟踪曲线见图8。

图8 圆轨迹跟踪曲线Fig.8 The curve of circular trajectory tracking
2)横向位置偏差初始值为0.5m,航向角偏差初始值为45.84°时的轨迹跟踪曲线见图9。

图9 圆轨迹跟踪曲线Fig.9 The curve of circular trajectory tracking
5 结论
1)从仿真结果看,三种控制器中,改进模糊PID控制器无论在航向角跟踪还是在横向位移跟踪中都有最优效果。改进模糊PID控制器在大多数工况下,响应更快,超调量更小,并且理论上稳态误差较小,但是所占用的计算时间稍长。
2)改进模糊PID控制器的稳定性好于模糊PID控制器和PID多偏差导航控制器,对于在偏差范围内的任何大小的偏差下的导航控制都适用,且效果更好。但是该控制器存在一定的稳态跟踪误差,误差在5cm以下。
[1]杨超,陈树新,刘立,等 .反应式导航在地下自主行驶铲运机中的应用[J].煤炭学报,2011,36(11):1943-1948.
[2]石峰,战凯,顾洪枢,等 .地下铲运机跟踪轨迹推算模型研究[J].有色金属(矿山部分),2010,62(6):66-69.
[3]郭鑫,战凯,顾洪枢,等 .无人操纵铲运机井下导航研究[J].有色金属,2009,61(4):143-147.
[4]郭鑫,战凯,迟洪鹏,等 .无人操纵铲运机转向控制方法的研究[J].矿冶,2009,18(2):71-75.
[5]石辛民,郝整清.模糊控制及其MATLAB仿真[M].北京:清华大学出版社,2008.
[6]肖灵芝,王家恩.基于模糊自适应PID的智能车辆路径跟踪控制[J].专用汽车,2011(2):68-71.
[7]任慧荣 .类车移动机器人轨迹跟踪控制方法研究[D].天津:天津大学,2008.
[8]曾光奇,胡均安,王 东,等 .模糊控制理论与工程运用[M].武汉:华中科技大学出版社,2006.
[9]杨益兴,崔大连,周爱军.模糊自适应PID控制器及SIMULINK仿真实现[J].舰船电子工程,2010,30(4):127-130.
[10]张德丰.MATLAB控制系统设计与仿真[M].北京:电子工业出版社,2009.
[11]杨超.地下自主行驶铲运机运动轨迹控制研究[D].北京:北京科技大学,2011.
The control method based on improved fuzzy-PID algorithm for the autonomous driving of intelligent LHD
LONG Zhizhuo,ZHAN Kai,GU Hongshu,SHI Feng,GUO Xin,FENG Xiaohua
(Beijing General Research Institute of Mining &Metallurgy,Beijing 100160,China)
Aiming at the autonomous driving problem of intelligent Load-Haul-Dump(LHD)in the underground environment,an improved fuzzy-PID algorithm is proposed based on the algorithm of multi-variable PID and fuzzy-PID.This algorithm introduces a weight coefficient to coordinate the effects on steering angle that comes from the outcome of path angle and lateral deviation.This paper builds a SIMULINK model of autonomous driving that depends on the mathematical model of LHD.The results of simulation prove that the improved fuzzy-PID algorithm has the advantages of fast response,small overshoot and steady-state error compared with the traditional multivariable PID and fuzzy-PID algorithm.
intelligent LHD;autonomous driving;improved fuzzy-PID algorithm
TD422.4
A
1671-4172(2015)05-0076-05
国家高技术研究发展规划(863计划)项目(2011AA060403)
龙智卓(1989-),男,助理工程师,机械设计及理论专业,主要研究方向为矿山机械、脱水设备及工程车辆。
10.3969/j.issn.1671-4172.2015.05.015
