仅基于冷却剂温度测量的压水堆功率控制
2015-04-16董哲黄晓津
董哲,黄晓津
(1.清华大学 核能与新能源技术研究院,北京 100084;2.先进反应堆工程与安全教育部重点实验室,北京 100084)
压水堆是应用最为广泛的核反应堆,且其安全、稳定和高效运行对我国经济、社会和环境的可持续发展甚至对世界核能工业的复兴都具有重要的意义。功率控制是保证反应堆运行性能的关键技术之一,由于反应堆是具有强参数不确定性的复杂非线性系统,非线性功率控制方法已成为当前的研究热点。国外在该领域的代表性工作是Shtessel提出的动态输出反馈滑模控制律,该控制律可保证系统闭环全局渐近稳定性,并用于实现对空间反应堆TOPAZ II的自启动和全范围负荷跟踪控制,但这一控制律的缺点是形式复杂且不易于工程实现和调试[1]。之后,Qaiser等学者也提出了核能系统的高阶滑模控制律[2]。国内学者研究的基本思想是通过利用反馈将核能系统转化为具有较强耗散性的系统,来提升闭环稳定性和负荷跟踪能力,本文作者通过深入研究反馈回路结构与系统耗散性的关系,提出了能够保证闭环全局渐近稳定性和大范围负荷跟踪能力的核能系统反馈耗散化负荷跟踪控制方法[3],并进而将其发展为性能更强的迭代反馈耗散化负荷跟踪控制方法[4]。虽然反馈耗散化方法具有较高的性能,但依据该方法设计的控制律与国外学者提出的非线性控制律具有相同的缺点,即形式复杂且不易于工程实现和调试。基于对核能系统自稳自调特性的机理分析,笔者利用能够表明中子运动环节和热工水力环节演化方向的偏移对偶熵构造了系统的Lyapunov函数,并进而设计了形式简洁、功能强大的非线性控制律,从而形成了核能系统的基于物理特性的非线性控制方法,简称非线性物理控制方法[5,6],依据该方法甚至可以证明只需简单的比例微分(PD)控制即可保证压水堆的闭环全局渐近稳定性和大范围负荷跟踪能力[6]。然而,上述非线性功率控制器都是在信息完备的情况下给出的,并不适用于测量系统出现故障的情形。因此,研究测量信息不完备情况下的反应堆功率控制方法就具有重要的工程意义。本文在核测量系统故障的前提下,提出了利用一回路冷却剂温度测量值来重构核功率信息的状态观测器,进而给出了保证输入状态稳定的动态输出反馈功率控制器,并通过数值仿真验证了该控制器可以提供满意的压水堆功率调节性能。
1 问题的提出
1.1 非线性状态空间模型
利用等效单组缓发中子点堆模型和单节点堆芯热工水力模型,并考虑燃料和冷却剂的温度反应性反馈效应,压水堆的动态特性可由如下常微分方程组简单描述:
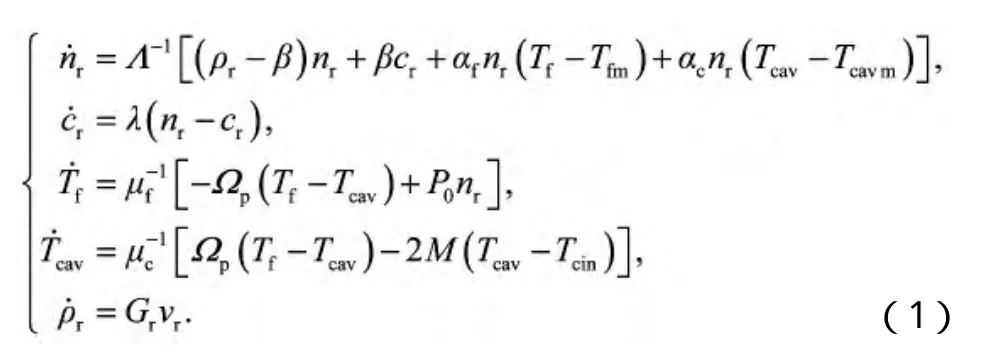
其中,nr是相对核功率,cr是等效单组缓发中子先驱核的相对浓度,Tf是平均燃料温度,Tcav是堆芯冷却剂平均温度,Tcin是堆芯入口冷却剂温度,Tfm和Tcavm分别是Tf和Tcav的初始稳态值,ρr是控制棒引入的外加反应性,vr是功率控制器输出的控制棒棒速,Λ是中子代时间,β是缓发中子份额,αf和αc分别是燃料和冷却剂的温度反应性反馈系数,λ是缓发中子先驱核的衰变常数,μf和μc分别是燃料元件和冷却剂的热容量,P0是反应堆额定热功率,Ωp是燃料和冷却剂间的换热系数,M是冷却剂质量流量与比热容的乘积,Gr是控制棒微分价值。
定义nr、cr、Tf、Tcav、Tcin和ρr相对于稳态值nr0、cr0、Tf0、Tcav0、Tcin0和ρr0的偏差分别为δnr=nr-nr0, δcr=cr-cr0,δTf=Tf-Tf0, δTcav=Tcav-Tcav0, δTcin=Tcin-Tcin0, δρr=ρr-ρr0。这里nr0、cr0、Tf0、Tcav0、Tcin0和ρr0可分别视为nr、cr、Tf、Tcav、Tcin和ρr的给定值。由于δTcin代表了下一级回路动态特性对一回路动态特性的影响,这里假定δTcin≡0。进而,定义
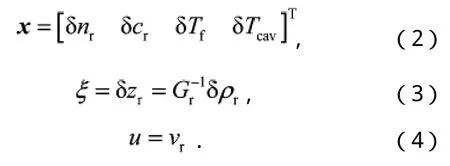
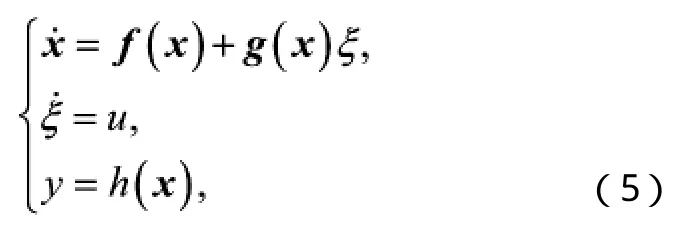
此外,由于核测量系统处于故障状态,系统输出仅为堆芯冷却剂平均温度。因此,用于功率控制器设计与性能分析的非线性状态空间模型为
其中

1.2 理论问题
基于上述非线性状态空间模型,为了仅利用对堆芯冷却剂温度测量信息来实现压水堆功率调节,需要解决如下的理论问题。
问题1:对于非线性系统(5),如何设计状态观测器来重构核功率信息?如何设计功率控制器保证闭环稳定性?
2 用于重构核功率信息的状态观测器
设非线性系统(1)具有形如
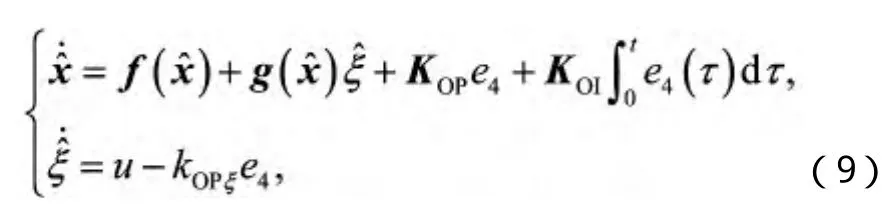
的状态观测器,其中和分别为对状态x和ξ的观测,函数f和g分别由式(6)和(7)给出,矩阵KOP和正常数kOPξ为观测器比例增益,矩阵KOI为观测器积分增益,且定义观测误差向量e为
下述定理1给出了观测器(9)保证渐近观测的充分条件。
定理1 考虑仅利用一回路水温测量信息的观测器(9),设观测器增益矩阵KOP和KOI分别满足

其中增益kONP、kOCP和kONI均为给定的正常数。若系统(5)全局渐近稳定,


则观测器(9)可保证全局渐近观测,其中0<γ< 1。
证明:由模型(5)和观测器(9)可知观测误差向量e的动态特性由常微分方程组

来描述。定义误差动态(15)的Lyapunov泛函为

其中
且μξ为待定常数。由函数ζen、ζec1和ζec2的正定性,可知Vec适定。
沿误差动态特性(15)决定的轨迹方向,对ζen、ζec1和ζec2分别求导可得
进而,取待定常数μξ满足

则由式(20)~(23)、(13)和(14)可得

由式(24)及系统(5)的全局渐近稳定性,可知观测误差向量e最终落入集合

又由误差动态方程(15),当e∈Ξne时,必有e≡O。从而说明观测器(9)是全局渐近的。证毕。
3 仅基于堆芯冷却剂温度测量的动态输出反馈功率控制器

的比例微分(PD)功率控制器,其中反馈增益knp、knd、kcp和kcd均为给定的正常数。下述引理1给出了PD控制(26)能够保证闭环全局渐近稳定性的充分条件。
引理1 当压水堆PD功率控制(26)的反馈增益满足式
时,闭环系统全局渐近稳定,其中
qT、κ1、κ2、γnd和εi(i=1,…,4)均为任意给定的正常数且0<εi<1.
证明:由于篇幅所限,从略。
由式(26)可知,该控 制器既需要核功率测量信息也需要堆芯冷却剂平均温度测 量信息。而在核测量系统故障情况下,核功率测量信息不能获取,因此希望利用观测器(9)和PD控制器(26)构建动态输出反馈控制器
实现压水堆功率调节,其中反馈增益knp、knd、kcp和kcd为给定的正常数,和分别为对状态x和ξ的观测,矢 量值函数f和g分别由式(6)和(7)给出, KOP、KOI和kOpξ为观测器增 益。下述定理2保证了动态输出反馈功率控制(31)可以保证闭 环系统的输入状态稳定性(Inputto-State Stability, ISS)。
定理2 考察由系统(5)和动态输出反馈控制器(31)构成的闭环系统,若knd、kcd和kcp分别满足式(27)、(28)和(29)且观测器增益KOP、KOI和kOpξ满足式(11)~(14),则此闭环系统是输入状态稳定的。
证明:取由模型(5)和动态输出反馈(31)构成的闭环系统的Lyapunov函数为
此外,由人民文学出版社出版,董卿主编的《朗读者》图书,采用了AR技术来提升阅读体验,借助“朗读者AR”客户端,扫描书中的任何一张图片,即可观看近1000分钟的视频片段,体验观看视频、聆听朗读与阅读文本的无缝连接;国内首部 VR 旅行类图书《奇遇》2017年9月上市,随书赠送一副 VR 眼镜,读者只需要扫描书中的二维码,就可以观看爱奇艺的 VR 视频,实现观看视频与阅读图书的完美结合,大大增强与读者的互动感。因此,出版社要想在VR/AR图书领域突围,做好内容的原创和选题创新成为重点。

其中增广状态向量z由式

定义,函数Vce由式(16)给出,qec为给定的正常数,

以及
由式(16)以及(34)~(37)可知,函数Vcc显然是适定的。进而,沿由模型(5)和控制(31)决定的闭环系统轨迹方向,对函数Vcc求导可得
其中

若将wc视为扰动,则显然由不等式(38)可知闭环系统是输入状态稳定的。证毕。

图1 工况A下 的仿真结果Fig.1 The simulation results under the condition of A
4 仿真结果与讨论
低温核供热堆(Nuclear Heating Reactor,NHR)是由清华大学设计的具有自稳压、全功率范围自然循环、非能动余热排出、控制棒水力驱动等特征的先进一体化小型压水堆[7]。为了验证动态输出反馈功率控制器(31)的性能,该控制器用于NHR的负荷跟踪功率调节。
仿真中考察了如下两种工况:
工况A:20%至100%满功率(Full Power,FP)1min匀速升负荷。
开始时,反 应堆稳定运行于20% FP;在第5000s,负荷在1min内线性升高到100%FP,此后维持不变。相对核功率、堆芯出入口水温变化量以及控制棒棒速的过渡过程曲线分别如图1所示。

图2 工况B下的仿真结果Fig.2 The simulation results under the condition of B
工况B:100%至20%FP甩负荷。
开始时,反应堆稳定运行于100% FP;在第5000 s,负荷阶跃降至20%FP,此后维持不变。相对核功率、堆芯出入口水温变化量以及控制棒棒速的过渡过程曲线如图2所示。
由图1和2可 知,在大范围快速升负荷工况下,核功率超调量小于5%,堆芯出口水温超调量约为2℃;在甩负荷工况下,核功率下超调不超过5%,堆芯出口水温超调量不超过2.5℃。此外,由图1和图2可知,状态观测器较好地重构了核功率信息,这为保证容错控制性能奠定了坚实的基础。由此可见,动态输出反馈控制器(31)是可以在核测量系统出现故障的情况下依旧保证满意的过渡过程性能指标。
5 结论
现有的压水堆功率控制都是以测量信息完备为基础的,即核功率和一回路冷却剂温度都可通过测量得到。因此,当测量系统处于故障状态时,现有的反应堆功率控制系统就不再能够保证压水堆的安全、稳定和高效运行。本文提出了利用一回路冷却剂温度测量值重构核功率信息的状态观测器,进而基于该观测器,构建了仅需要冷却剂温度测量且能够保证闭环输入状态稳定 的压水堆动态输出反馈功率控制器。数值仿真结果表明该控制器可以在核测量系统出现故障的 情况下保证压水堆仍然具备满意的负荷跟踪能力。进一步的工作方向是考虑模型的不确定性,设计自适应动态输出反馈功率控制器。
[1] Shtessel YB.Sliding mode control of the space nuclear reactor system [J].IEEE Transactions on Aerospace and Electronic sy stems,1998, 34: 579-589.
[2] Qaiser SH, Bhatti AI, Iqbal M, Samar R, Qadir J.Model validation and high order sliding mode controller design for a research reactor [J].Annals of Nuclear Energy, 2 009, 36: 37-45.
[3] Dong Z, Feng J, Huang X, Zhang L.Power-level control of nuc lear reactors based on feedback dissipation and backstepping [J].IEEE Transactions on Nuclear Science, 2010, 57: 1577- 1588.
[4] Dong Z.Nonlinear state-feedback dissipation power level control for nuclear reactors [J].IEEE Transactions on Nuclear Science,2011, 58: 241-257.
[5] Dong Z.Nonlinear dynamic output-feedback power-level control for PWRs: a shifted-ectropy base d design approach [J].Progress in Nuclear Energy, 2013, 68: 223- 234.
[6] Dong Z.PD power-level control design for PWRs: a physically based approach [J].IEEE Transactions on Nuclear Science, 2013,60(5): 3889-3898.
[7] Wang D, Ma C, Dong D, Lin J.Chinese nuclear heating test reactor and demonstration plant [J].Nuclear Engineering and Design, 1992, 136: 91-98.
