采空区三维激光扫描智能化监测技术研究与应用
2015-04-15余乐文张元生王利岗
余乐文,张 达,张元生,王利岗
(1.北京矿冶研究总院,北京100160;2.金属矿山智能开采技术北京市重点实验室,北京102628)
采空区三维激光扫描智能化监测技术研究与应用
余乐文1,2,张 达1,2,张元生1,2,王利岗1,2
(1.北京矿冶研究总院,北京100160;2.金属矿山智能开采技术北京市重点实验室,北京102628)
研制出基于三维激光扫描技术的采空区智能化监测系统,实现空区无人自动化监测。系统通过导轨自动伸入空区测量,将采集的点云数据传输到地面控制中心,通过软件处理获得空区三维形态,将多期测量数据进行对比,分析空区相对变形状况。试验表明,系统可准确判断空区变形位置和体积,为采空区智能化监测提供技术支撑。
采空区;智能化;激光扫描;监测
在经济和社会快速发展的推动下,我国已成为矿产资源消费大国,矿产资源消耗量激增。随着地下矿山开采深度的不断增加,开采矿产资源形成的地下采空区安全隐患日益严重,容易出现采场及巷道的大面积冒顶、片帮和严重的闭合变形,进而发生垮塌事故,造成矿山重大经济损失甚至人员伤亡。因此,科学地揭示井下采空区的三维形态、实现智能化监测对矿山的生产和安全有着非常重要的作用[1-4]。
在传统的采空区变形监测方法中,主要采用顶板沉降仪、收敛计、伸长仪以及水准仪、经纬仪等测量学仪器,但是传统方法存在监测点少、安装难度大、劳动强度大、效率低、精度低等问题[5-7]。针对上述问题,开发出一套采空区三维激光扫描智能化监测系统,实现对采空区整体监测,具有非接触、高精度、高效率等优点。
1 工作原理
采空区三维激光扫描智能化监测系统通过多期在固定测量点扫描采空区三维形态,根据扫描结果分析空区是否发生冒顶、片帮等岩壁垮落,并能精确测定岩壁垮落的发生部位和垮落体积[8-9]。
系统通过激光发射到接收之间的时间差来计算距离,同时内置精密编码器同步测量每个激光脉冲横向扫描角度观测值和纵向扫描角度观测值,由此可计算任意点的三维坐标[10-12]。
2 监测系统简介
采空区三维激光扫描智能化监测系统由三维激光扫描主机、伸缩机构、控制系统、通信系统、软件系统和地面数据分析工作站组成,如图1所示。
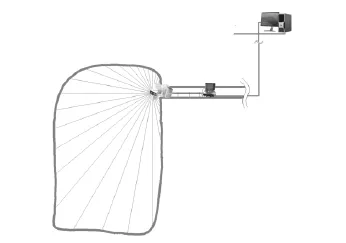
图1 系统示意图Fig.1 System diagram
2.1 三维激光扫描主机开发
扫描主机是变形监测系统的核心部件,主要由激光测距传感器、径向轴向驱动系统、倾角传感器等部分组成,通过径向轴向电机360度扫描,获取采空区整体三维形态,进而来对空区的变形量进行分析计算。
2.2 可自动控制的伸缩机构
为了实现采空区智能化监测,开发出全自动多行程空区伸缩机械装置。在三维激光扫描仪工作时,下级直线导轨伸缩机构带动扫描主机到空区边缘,然后上级滚珠丝杆伸缩装置伸入空区扫描;当测量完空区形状后,扫描主机通过两级伸缩机构自动回到储藏室中,防止空区内落石损坏仪器,如图2所示。

图2 伸缩机构Fig.2 Telescopic mechanism
2.3 远距离智能化控制技术研究
采空区三维激光扫描智能化监测系统通过搭建有线、无线相结合的井下综合通讯系统,实现地面数据分析工作站对井下设备的智能化通信与控制,实现对井下空区变形监测数据的高精度实时获取。
采空区三维激光扫描智能化监测系统远程控制主要包括两级伸缩机构控制、三维激光主机扫描运动控制、储藏室自动控制等。其中两级伸缩机构控制包含步进电机控制、接近开关位置控制;三维激光扫描仪扫描控制包含激光测距传感器数据采集、径向轴向电机控制、编码器位置反馈、倾角传感器位置反馈;储藏室自动控制包含直流电机转动、正反转切换、接近开关位置控制、温湿度传感器环境参数控制等。
2.4 变形区域识别与计算
由于采空区数据的复杂性、不规则性且存在大量的盲区,因此提出一种基于八叉树的不同时段点云形变分析算法,设置形变点特征,利用八叉树数据结构分别对不同时期的采空区点云数据根据形变点特征进行查找,最后放入形变点容器,由于采空区点云中存在大量有差异的点,并不是形变点,因此,需要用离散噪声点滤波算法进行滤波处理,以保留真正的形变区域。
3 试验研究
形变分析实验主要是通过对比两次扫描的点云数据,判断是否发生变形。如果存在差异,软件系统会自动识别形变位置并进行提取,还可以计算形变的体积,为空区的稳定性评价提供一种直观而有效的手段。
3.1 采空区点云数据采集
由于传统标准步距扫描算法易造成距离监测系统近的空区点云密集,距离监测系统远的空区点云稀疏,试验过程中采用自主开发的自适应扫描算法[13],如图3所示。
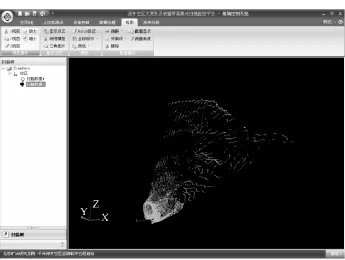
图3 采空区点云数据Fig.3 The data of cavity
3.2 形变区域提取
由于试验采空区稳定,测试过程中未发生形变,为了验证系统准确性,试验过程中,在连接采空区的巷道附近人为构造了一块大小已知,并且位置容易判断的类似长方体的废石堆,参数为:长1.59m、宽0.95m,高0.28m。采用采空区智能化监测系统对采空区及巷道进行扫描,与没有构造废石堆进行对比,结果如图4所示。
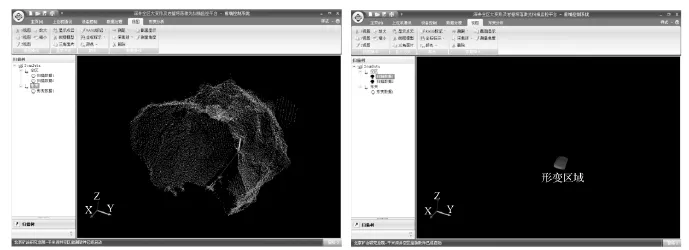
图4 形变提取结果Fig.4 The results of deformation extraction
试验提取的体积为0.42m3,与实际相符,试验验证了形变提取算法的准确性和有效性。
4 结论
研制出采空区三维激光扫描智能化监测系统,打破了国外在三维激光扫描仪产品上的技术垄断,实现了采空区远程智能化监测。试验结果表明,系统可有效监测采空区三维形态变化,提高了采空区监测的技术水平,保障了企业生产安全,对矿山综合开采与治理具有重要意义。
[1]许梦国,姚高辉.无底柱分段崩落发采场高应力区岩爆监测预报方法研究[J].金属矿山,2007(8):386-389.
[2]尹盼,阳春华.基于ZigBee技术的矿山监测预警系统[J].工业控制计算机,2009(2):49-50.
[3]朱权洁,欧阳治华,龚剑.基于GDAS技术的采空区稳定性无线实时监测及安全预警研究[J].矿业研究与开发,2010,30(6):83-85.
[4]尹彦波.采空区稳定性监测预警新技术研究与应用[J].采矿技术,2008,8(9):33-37.
[5]李夕兵,李地元,赵国彦,等.金属矿地下采空区探测、处理与安全评判[J].采矿与安全工程学报,2006,23(1):24-29.
[6]张 达,王利岗.三维激光扫描仪井下安全监测技术[J].有色金属(矿山部分),2011,63(4):1-4.
[7]王利岗,张 达,杨小聪.井下空区安全监测三维激光扫描仪高精度运动控制技术[J].有色金属(矿山部分),2012,64(2):1-4.
[8]陈凯,杨小聪,张达.采空区三维激光扫描变形监测试验研究[J].有色金属(矿山部分),2012,64(5):1-5.
[9]陈凯,杨小聪,张 达.采空区三维激光扫描变形监测系统[J].矿冶,2012,21(1):60-62.
[10]余乐文,张达,余斌,等.矿用三维激光扫描测量系统的研制[J].金属矿山,2012(10):101-103,107.
[11]余乐文,张 达,朱瑞军,等.基于三维激光扫描技术的料位检测试验研究[J].有色金属(矿山部分),2014,66(5):88-90.
[12]杨斐文,陆得盛,张 达,等.基于矿用三维激光扫描系统的CAN总线传输协议研究[J].有色金属(矿山部分),2013,65(5):5-7.
[13]张达,余乐文,余斌,等.一种自适应分辨率的三维激光扫描测量方法[J].矿冶,2013,22(4):1-4.
Application and study on intelligent monitoring technology for cavity based on 3Dlaser scanner
YU Lewen1,2,ZHANG Da1,2,ZHANG Yuansheng1,2,WANG Ligang1,2
(1.Beijing General Research Institute of Mining &Metallurgy,Beijing 100160,China;2.Beijing Key Laboratory of Nonferrous Intelligent Mining Technology,Beijing 102628,China)
The intelligent monitoring system for cavity based on 3Dlaser scanner is put forward,which is unmanned and automatic.The system can automatically mobile into the cavity measuring by rail,and transmitting the data to the control center.The 3Dshape of cavity is obtained by software processing,analysis the relative deformation of cavity by multi-phase measured data comparison.Tests show that the system can accurately determine the location and size of the deformation,and provide technical support for intelligent monitoring of cavity.
cavity;laser scanning;intelligent;monitoring
TD76
Α
1671-4172(2015)03-0001-03
国家高技术研究发展计划项目(2011AA060405);国家国际科技合作专项项目(2011DFA71990);“十二五”国家科技支撑计划项目(2012BAB01B04;2012BAK09B03)
余乐文(1984-),男,工程师,硕士,机械设计及理论专业,主要从事矿山智能仪器仪表开发工作。
10.3969/j.issn.1671-4172.2015.03.001