基于VISSIM 的道路优化设计①
2015-04-14张帅
张 帅
(天津市市政工程设计研究院,天津300051)
0 引 言
VISSIM 是一种微观的、基于时间间隔和驾驶行为的仿真建模工具,其核心模型是跟车模型和车道变换模型[1].跟车模型是一种基于生理—心理的驾驶行为模型,该模型的基本原理是:当后车的驾驶员觉得他与前车之间的距离太小,而且小于他认为的最安全的距离时,他就要采取减速措施.后车驾驶员不容易判断出前车的行驶车速,因此会保持低于前车的车速行驶一段时间后,前后车的距离达到了后车驾驶员所认为的另一个可以开始加速的安全距离时,后车开始加速.周而复始形成了一个加速、减速的迭代过程.在多车道的路段上,VISSIM 仿真时车辆的驾驶员除了考虑本车道车辆外,还要考虑相邻车道上的车辆变化情况,会根据车辆运行情况进行换道,车道变换采用的是Rule—based 算法[2].使用VISSIM 修正可以最大程度的模拟自由流交通条件下车辆的运行状态,其修正的运行速度是基于驾驶员的生理特征和行为习惯得出的,真实度相对较高.
1 基于VISSIM 的运行速度采集
某高速K5+000 ~K19+000 段路线直曲多变,纵坡路段多,又有高填深挖段,由此我们以其为研究对象,通过VISSIM 软件对路线运行速度进行预测采集,以检查设计指标和实际成果之间的符合性,若相差较大,须重新调整设计.
(1)划分路段
由于VISSIM 采用跟车模型和路线纵坡有很大关系,,在VISSIM 软件的跟车模型中,认为+1%的坡度值相当于加速度降低0.1m/s2,-1%的坡度值相当于加速度增加0.1m/s2,为了更好的拟合平面线形,根据路线的直曲情况和纵坡情况把整段路线划分为20 个路段,划分情况详见表1.
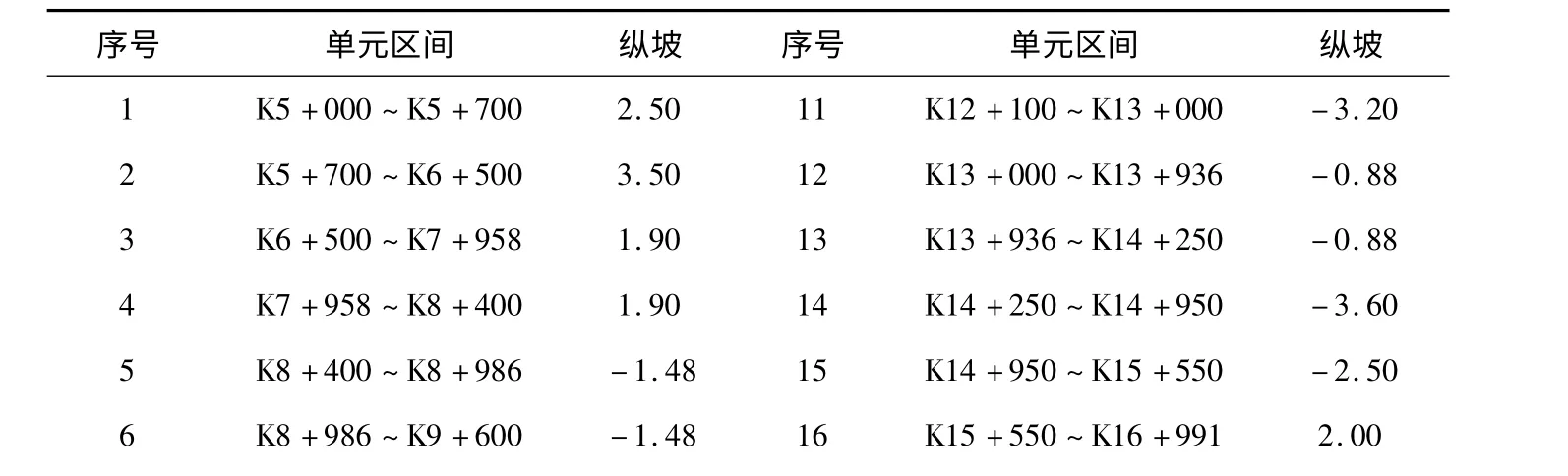
表1 路段划分
7 K9+600 ~K10+400 -3.60 17 K16+991 ~K17+500 2.00 8 K10+400 ~K10+915 -1.88 18 K17+500 ~K17+950 2.50 9 K10+915 ~K11+538 -1.88 19 K17+950 ~K18+700 3.60 10 K11+538 ~K12+100 -1.88 20 K18+700 ~K19+0002.00
(2)导入待分析路段的CAD 底图
导入K5+000 ~K19+000 段平面图文件,然后点击显示路网按钮,在VISSIM 软件中创建K5+000 ~K19+000 待分析路段.

图1 小客车运行速度变化曲线

图2 大货车运行速度变化曲线
(3)拟合平面线形
首先创建K5+000 ~K5+345 路段单元,点击创建路段按钮,在底图上从路段起点拖动到路段终点,依次输入路段编号、名称、车道数量以及纵坡坡度,行为类型选择高速公路(随意选择车道),点击确定按钮,完成了第1 个路段的描绘.描绘曲线时,可以通过选中路段后在需要的位置点右键插入节点,然后拖动路段,更好的拟合线形.
依次描绘余下的19 个路段,使用连接器连接相邻的两路段单元.依次连接所有的路段单元形成一条完整的路线.
(4)标定小客车和大客车的期望运行速度
标定路段内的期望运行速度分布,小客车(100km/h ~120km/h)、大货车(60km/h ~80km/h),依次选择仿真基础数据一分布一期望车速,分别输入小客车和大货车的期望运行车速值:
(5)标定交通构成和交通量
输入交通构成,依次点击交通-交通构成,输入车辆类型及其所占的比例.选择交通流量输入模式,双击需要定义交通量的路段,在弹出窗口中输入参数.

图3 小客车、大货车相邻路段运行速度差值曲线

图4 修正后的小客车运行速度曲线

图5 修正后的小客车相邻路段运行速度差值曲线
(6)设置路线起终点
选择行驶路径决策模式,分别选择第首末路段单元,生成路线路径.
(7)运行速度采集
激活数据采集模式,设置数据采集点.由于路线只有直线段和纵坡段两种类型的特征路段单元,因此我们在每个竖曲线的起终点、中点位置以及路线的起终点各设置一个运行速度采集点,全线共设置32 个.运行仿真,得到了这32 个点的运行速度值,如下所示:

2 结果分析
对VISSIM 得到的结果进行整理,得到了小客车和大货车在32 个数据采集点的运行速度和相邻路段的差值,如图1 ~3 所示.
从图2,3 可以看出,小客车和大客车的运行速度变化趋势较为一致.小客车相邻路段单元的运行速度差绝大部分在20km/h 变化范围内,在7,8 和22,23 处运行速度波动较大,在7,8 处运行速度差值大于20km/h;这是因为车辆经过了长距离的平直路段加速,使得在直线段末端速度过高;相对小客车,大货车的运行速度较为稳定,同样在7,8 和22,23 处的运行速度出现了大幅波动,但运行速度差值仍保持在±10km/h 范围内.
参考日本和德国的规定,直线最大长度不超过20V[3].在划分的路段单元中,把平直路段单元看成直线,数据采集点7,8 之间的平直段之间的长度为2700m.因此,需要在K8+700 ~K8+800 处设置一处减速区.VISSIM 模型中,车辆在达到减速区之前就开始减速,到达减速区时的速度等于限速的值.
重新运行VISSIM 仿真,重复以上步骤,再次得到小客车的运行速度曲线和相邻路段运行速度差值如图4 和5 所示.
从图4 和图5 可以看出,增加减速区修正后,消除了先前7,8 处的运行速度突变,小客车全线的运行速度差值均在20km/h 变化范围内,满足了线形一致性和连续性的要求.
3 结 论
本文以某高速K5+000 ~K19+000 段工程实例为基础,根据VISSIM 软件中跟车模型的特点,将路线划分为20 个路段进行拟合,使用VISIIM 软件采集了全线32 处的运行速度,通过对相邻路段运行速度差值的分析,发现了设计中存在的安全隐患,通过设置减速区限速的方法,重新对路线的运行速度进行了修正采集,保证了速度协调性和线形的一致性.
[1] 谢正全.基于VISSIM 的实时数据交通仿真技术的应用研究[D].西安:西南交通大学,2010.
[2] 高晶.基于VISSIM 的驾驶模拟系统交通流仿真研究[D].云南:昆明理工大学,2007.
[3] 刘小梅.高速公路线形设计[J].科学之友,2007,(2):33 ~34.
