电动汽车四轮毂电机偏差耦合协调控制研究
2015-04-13赵宾戚慧
赵 宾 戚 慧
(1.南京航空航天大学金城学院,江苏 南京211156;2.国网新疆电力公司乌鲁木齐供电公司,新疆 乌鲁木齐830011)
0 引言
电动汽车作为新能源汽车的主力军,具有易操纵、零污染、噪声低、维修及运行成本低等优点。尤其是轮毂式电动汽车,以其优越的控制性能和简单的结构特点,成为电动汽车行业的一匹黑马。
随着电力电子技术、电机控制技术和自动控制技术的不断发展,电控方式成为多电机同步运行的控制方式,但是最初的电控方式是非耦合的,控制精度也不高,因此有学者提出了交叉耦合控制策略,但交叉耦合控制不适用3台以上电机的同步控制,因此本文对交叉耦合控制结构进行改进,提出了偏差耦合控制。
1 多电机偏差耦合同步控制系统模型
偏差耦合控制方式同步性能好,其中任何一个电机因负载发生扰动而产生转速变化时,其他电机的控制器也会收到波动信息,进而调整转速,实现同步运行。偏差耦合控制中,速度补偿器发出的补偿信号是由该台电机的实际转速分别与其他电机的实际转速相减以后,将3个转速偏差值再相加得到的。结构框图如图1所示。

图1 四电机偏差耦合同步控制系统原理框图
偏差耦合控制中,最重要的模块就是速度补偿部分,该部分为每个电机提供速度补偿。电机A 的速度补偿部分结构图如图2所示。

图2 电机A 的速度补偿结构
2 仿真与分析
对上述偏差耦合控制进行仿真,仿真条件设置如下:4个电机启动时均为空载,给定转速为750r/min,在0.05s时,突然给受扰电机1加载,转矩为20N·m。仿真中4个电机各参数完全相同,所以非受扰电机2、3、4的变化相同。得到仿真结果如图3~5所示。
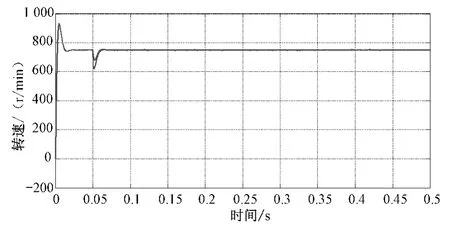
图3 突加负载时各电机转速

图4 突加负载时各电机之间的跟随误差

图5 突加负载时各电机之间的同步误差
如图3所示,电机1的转速迅速下降为620r/min;此时,其他3个电机仍然是空载运行,但是电机2、电机3、电机4的转速会因为电机1转速的减小而减小,降为680r/min。0.01s以后,即在0.06s时,4个电机同时达到给定转速750r/min,进入稳态运行。因此,该同步控制方法,在某一个电机因扰动导致转速发生改变时,速度补偿器能快速将变化反应给其他电机,使得4个电机快速恢复同步状态。
从图4可以看出,单个电机空载启动时,在极短的时间内,即t=0.02s时,转速达到给定值,快速性好。电机1 在t=0.05s突加负载以后,仅用了0.01s又恢复到给定值,跟随误差变为0,四电机同步运行,整个系统的动态性能好。
从图5可以看出,4个电机在空载启动时,同步性能很好,能够同时达到给定值,同步误差为0,但当受扰电机1突加负载以后,电机1与其他3个非受扰电机出现同步误差,由于其余3个电机运行速度相同,因此受扰电机1与非受扰电机2、3、4同步误差同为85r/min,其余3个非受扰电机两两之间的同步误差均为0。
3 结语
仿真结果表明,整个系统在运行中,当某个电机受到干扰导致速度发生变化时,通过偏差耦合控制方式,其他电机也能响应其变化,并在极短时间内,使4个电机恢复到扰动前的状态,整个系统快速性好、鲁棒性强。
[1]李崇坚.交流同步电机调速系统[M].2 版.北京:科学出版社,2013.
[2]Lu D B,Li J Q,Ouyang M G,et al.Research on hub motor control of four-wheel drive electric vehicle[C]//Vehicle Power and Propulsion Conference(VPPC),IEEE,2011:1-5.
[3]张承慧,石庆升,程金.一种基于相邻耦合误差的多电机同步控制策略[J].中国电机工程学报,2007,27(15):59-63.
