基于道路交通环境的非机动车骑行行为特征研究
2015-04-13曹士强许丹丹
曹士强, 边 扬, 荣 建, 许丹丹
(交通工程北京市重点实验室(北京工业大学), 北京 100124)
基于道路交通环境的非机动车骑行行为特征研究
曹士强, 边 扬, 荣 建, 许丹丹
(交通工程北京市重点实验室(北京工业大学), 北京 100124)
为促进路段非机动车服务水平评价及骑行环境改善,以道路交通环境为基础,研究非机动车骑行行为特征是十分必要的. 以机非实体隔离、未施划人行横道的非机动车专用道为研究对象,在骑行行为特征影响因素分析的基础上,针对具有不同道路交通环境的典型路段采集非机动车骑行行为信息,应用二维运动图像解析技术与数理统计分析方法研究速度、加减速度、加速度变化率、横向偏移率等骑行行为特征,剖析不同道路交通环境下骑行行为特征的特点;在此基础上,利用广义回归神经网络建立基于道路交通环境的非机动车骑行行为特征模型. 通过模型精度分析,证明基于道路交通环境的广义回归神经网络模型对非机动车骑行行为特征的预测效果良好.
非机动车; 道路交通环境; 骑行行为特征; 广义回归神经网络
Study on Non-motorized Vehicle Riding Behavior Characteristics
0 引言
近年来,许多国家对非机动车交通的发展给予了充分重视,非机动车交通正处于蓬勃发展阶段. 荷兰、丹麦和德国等国家为提高自行车出行,施划了大量的自行车专用道,并实施交通静化措施,保证了自行车良好的出行环境,形成了难以抵挡的骑行诱惑[1],使得自行车出行成为发展趋势. 然而北京市的自行车出行方式比例却由2000年的38.5%下降至2013年的12.1%[2],呈现逐年下降的趋势. 对比北京市与国外其他城市非机动车发展现状,不难发现北京市的非机动车出行环境更加恶劣,同时非机动车路权难以得到有效保障. 不同的非机动车出行环境决定不同的骑行行为特征,也决定着出行者是否选择非机动车出行. 因此,有必要研究在不同的出行环境下非机动车骑行行为,促进非机动车出行现状的改善.
现阶段,非机动车骑行行为特征的研究主要集中于骑行行为特征与相关的骑行行为模型. 其中,在非机动车骑行行为特征方面,张起森[3]、梁春岩[4]研究有机非物理隔离路段与无机非物理隔离路段的速度特征,建立了自行车交通流三参数模型;潘晓东[5]以跑车与电动自行车为研究对象开展非机动车骑行行为实验,研究不同性别、不同车辆类型的交通流特征;在非机动车骑行行为模型方面,李艳霞[6]、张晋[7]、魏丽英[8]等基于元胞自动机模型或其改进模型建立自行车交通流模型. 梁肖[9]建立基于心理生理力学的感知模型与考虑气质类型的轨迹选择行为模型,研究自行车微观行为. 但现有研究未能分类或简单地依据城市道路横断面研究非机动车骑行行为特征,忽略了不同道路交通环境具有不同骑行行为特征的特点,研究结论无法适用于其他道路;同时以往研究主要针对自行车展开,对电动自行车相关研究涉及较少,因此,以往研究已不能完全适用于电动自行车高度发达的混合非机动车交通流条件.
本文首先以机非实体隔离、未施划人行横道的非机动车专用道为研究对象,研究无其他交通主体干扰条件下非机动车骑行行为特征,建立基于道路交通环境的非机动车骑行行为特征广义回归神经网络模型,为其他类型的非机动车道研究奠定基础.
1 非机动车骑行行为特征影响因素分析
非机动车骑行行为特征的主要影响因素为道路环境条件与交通环境条件. 其中,道路隔离形式、道路宽度等道路环境条件是非机动车骑行行为的载体,决定非机动车流受到的干扰类型;非机动车流量、电动自行车混合率与相邻机动车道的机动车流量、车辆组成等交通环境条件是非机动车骑行行为的影响因素,决定非机动车流受到的干扰程度.
针对机非实体隔离、未施划人行横道的非机动车专用道而言,由于不存在其他交通流的干扰,非机动车骑行行为特征的道路环境影响因素为非机动车道宽度;交通环境影响因素包括非机动车流量、非机动车密度、电动自行车混合率与反向行驶流率比.
2 非机动车骑行行为信息采集与提取
选取具有不同道路环境与交通环境的机非实体隔离、未施划人行横道的非机动车专用道道路,运用视频录像调查方法采集非机动车骑行行为信息并进行相关数据提取.
2.1 非机动车骑行行为信息采集
为获取不同道路交通环境下非机动车骑行行为数据,需要选取非机动车流量连续渐变的时段与具有不同道路基础属性的路段开展调查. 因此,在工作日早高峰7:00—9:00与晚高峰17:00—19:00,选取北京市朝阳门南大街(三丰胡同—朝外南街)、复兴门外大街(三里河南六巷—白云路)和中关村北大街(清华大学附属中学—紫荆路)3条具有机非实体隔离、未施划人行横道的非机动车专用道进行视频录像调查. 调查地点实景图与路段属性分别如图1与表1所示.

图1 调查地点实景图

道路名称起讫点隔离形式非机动车道宽度/m朝阳门南大街三丰胡同—朝外南街实体隔离36复兴门外大街三里河南六巷—白云路实体隔离31中关村北大街清华大学附属中学—紫荆路实体隔离51
2.2 非机动车骑行行为信息提取
基于调查视频,选取满足不同道路结构参数、非机动车密度、电动自行车混合率、非机动车反向行驶流率比的视频片段,应用二维运动图像解析技术,以0.02 s为周期,手动标记视频片段中通过调查路段的所有非机动车的瞬时位置,输出坐标信息、速度信息和加速度信息,数据样式如图2所示.
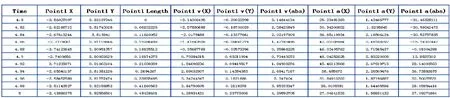
图2 二维运动图像解析软件输出数据样式
针对3个调查地点分别提取40、57和83辆非机动车骑行行为信息,共获取8 493条瞬时数据,以此作为非机动车骑行行为特征研究的基础数据.
3 非机动车骑行行为特征研究
在非机动车骑行行为信息提取的基础上,应用数理统计分析方法,研究平均速度、速度标准差等非机动车骑行行为特征,对比分析不同道路交通环境条件下的骑行行为.
3.1 非机动车骑行行为特征分析
在不同的道路交通环境条件下骑行时,骑行者的骑行速度、加减速度的大小与频率以及横向摇摆程度都存在明显的差别. 因此,为了全面刻画非机动车骑行行为特征,本文在速度相关指标的基础上,提出平均绝对加速度、平均绝对加速度变化率与平均绝对横向偏移率3类指标,其中平均绝对加速度表征所有非机动车交通的瞬时加减速度的大小情况,如式(1)所示;平均绝对加速度变化率表征相比于前一时刻,所有非机动车交通的加减速度变化情况,如式(2)所示;平均绝对横向偏移率表征非机动车交通的摇摆特性,如式(3)所示.
(1)
式中,|a|ave为平均绝对加速度,m/s2;n为瞬时场景中非机动车的数量;ai为瞬时场景中第i辆非机动车的加速度,m/s2.
(2)
(3)
通过以上分析,机非实体隔离、未施划人行横道的非机动车专用道的骑行行为特征如表2所示,其中非机动车的平均速度为5.92 m/s;平均绝对加速度为1.38 m/s2;平均绝对加速度变化率为3.59 m/s3;平均绝对横向偏移率为0.12 m/s.

表2 非机动车骑行行为特征指标
3.2 非机动车骑行行为特征对比
绘制朝阳门南大街、复兴门外大街、中关村北大街3种不同道路基础属性非机动车道的骑行行为特征雷达图,如图3所示. 从图可得:①不同道路基础属性的非机动车道具有不同的骑行行为特征;②非机动车道宽度的设置存在适宜范围. 在宽度适宜的非机动车道上骑行时,骑行者不会存在加减速度频繁与大幅度摇摆的现象;当宽度过大时,骑行者的安全性降低;而宽度过小时,骑行者之间的干扰程度明显增加;③平均速度、平均绝对加速度、平均绝对加速度变化率与平均绝对横向偏移率等骑行行为特征之间具有相同的变化趋势,即当骑行者骑行速度增加时,不同骑行者之间的速度差距加大,加减速度明显,同时由于超越车辆与骑行的不稳定性而导致横向摇摆幅度变大.

图3 不同道路环境条件下骑行行为特征对比图
将前人研究的自行车和电动自行车的速度特征与本文研究结论进行对比,如图4所示. 本文研究得出的非机动车平均速度分别大于文献[3-4]研究的自行车平均速度,但小于文献[5]研究的电动自行车平均速度. 其原因在于现阶段的非机动车交通流是由自行车与电动自行车组成的混合交通流,非机动车平均速度大于自行车平均速度而小于电动自行车平均速度的现象是必然存在的. 因此,不同的交通环境条件会对非机动车骑行行为产生较大影响.
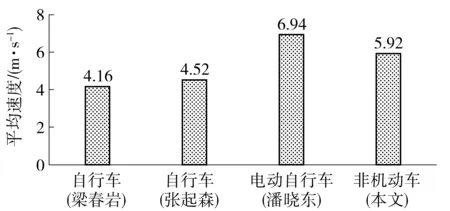
图4 不同交通环境条件下骑行行为特征对比图
4 基于道路交通环境的非机动车骑行行为特征广义回归神经网络模型
由3.2节的分析可知,道路交通环境对非机动车骑行行为特征具有较大影响,因此,本文以道路交通环境为基础,应用广义回归神经网络建立非机动车骑行行为特征模型.
4.1 模型输入变量确定
在非机动车骑行行为特征影响因素分析的基础上,研究以非机动车道宽度、非机动车流量、非机动车密度、电动自行车混合率与反向行驶流率比的道路交通环境条件作为模型可能的输入变量.
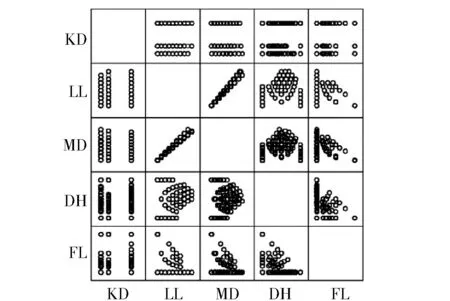
图5 道路交通环境因素散点图
绘制5类变量的散点图,如图5所示,由图5可看出非机动车流量与非机动车密度存在一定的相关性. 同时,在控制其余变量的基础上,针对两两变量进行偏相关分析,相关系数如表3所示,其中非机动车道宽度、非机动车流量与非机动车密度3类变量之间的相关系数绝对值均大于0.7;电动自行车混合率与反向行驶流率比之间以及与其余变量的相关系数绝对值均小于0.4. 因此,非机动车道宽度、非机动车流量与非机动车密度具有较强的相关性. 由于非机动车密度指标是交通流特征研究中最常用且最综合的参数,因此研究确定非机动车密度、电动自行车混合率与反向行驶流率比作为模型最终的输入变量.

表3 道路交通环境因素的相关系数
4.2 基于道路交通环境的非机动车骑行行为特征广义回归神经网络模型
广义回归神经网络(General Regression Neural Network,GRNN)是一种被广泛应用于函数逼近的径向基神经网络,能够深入挖掘数据之间的隐含关系,尽可能地逼近非线性系统,具有良好的逼近能力、分类能力与学习速度. 因此,针对道路交通环境与非机动车交通流特征之间未知的函数关系,本文采用广义回归神经网络进行函数拟合.
利用道路交通环境数据与骑行行为特征数据,应用Matlab软件建立非机动车骑行行为特征广义回归神经网络模型. 该模型包括输入层、径向基隐含层与输出层,其中输入层输入非机动车密度、电动自行车混合率与反向行驶流率比的道路交通环境条件,径向基隐含层负责数据处理与预测,输出层输出平均速度、平均绝对加速度、平均绝对加速度变化率与平均绝对横向偏移率等骑行行为特征指标.
本文将133组道路交通环境条件与骑行行为特征数据用于广义回归神经网络的训练与测试,其中83组基础数据为训练数据,50组基础数据为测试数据. 同时,应用均方根误差、平均绝对百分比误差与负相关系数检验模型精度,具体如表4所示. 由表4可看出,模型的平均绝对百分比误差均小于20%,负相关系数均小于0.15. 因此,本文建立的基于道路交通环境的非机动车骑行行为特征广义回归神经网络模型具有较高的精度,同时模型输出与真实观测值具有较强的相关性.

表4 基于道路交通环境的非机动车骑行行为特征广义回归神经网络模型误差
5 结束语
本文针对机非实体隔离、未施划人行横道的非机动车专用道开展视频录像调查,应用二维运行图像解析技术研究非机动车骑行行为特征,并对比分析不同道路交通环境下骑行行为特征的特点;从道路交通环境角度出发,建立非机动车骑行行为特征广义回归神经网络模型. 该模型精度较高,可以实现通过简便的交通调查获取非机动车骑行行为特征的功能. 但论文需要进一步完善不同出行环境下的非机动车骑行行为特征及其模型,使其普遍应用于非机动车骑行行为特征的研究与实践工作中.
[1] 约翰·普切尔, 拉尔夫·比勒, 孙苑鑫. 难以抵挡的骑行诱惑: 荷兰、丹麦和德国的自行车交通推广经验研究[J]. 国际城市规划 , 2012, 27(5): 26-42.
[2] 北京交通发展研究中心. 北京市交通发展年度报告[R]. 北京, 2014.
[3] 张起森, 张亚平. 道路通行能力分析[M]. 北京: 人民交通出版社, 2002.
[4] 梁春岩. 自行车交通流特性及应用研究[D]. 长春: 吉林大学, 2007.
[5] 潘晓东, 赵晓翠, 杨轸, 等. 非机动车骑行行为实验研究[J]. 长沙交通学院学报, 2008, 24(4): 62-66.
[6] 李艳霞. 基于多值元胞自动机的自行车流模型模拟及分析研究[D]. 北京: 北京交通大学, 2007.
[7] 张晋, 王慧, 李平. 基于元胞自动机(CA)的自行车流建模及仿真[J]. 公路交通科技, 2006, 23(1): 125-129.
[8] 魏丽英, 应力天. 基于元胞自动机的自行车交通流仿真建模[J]. 吉林大学学报, 2011, 41(1): 51-55.
[9] 梁肖. 自行车微观行为动力学建模及仿真研究[D]. 北京: 北京交通大学, 2012.
Based on Road and Traffic Environment
CAO Shi-qiang, BIAN Yang, RONG Jian, XU Dan-dan
(Beijing Key Laboratory of Traffic Engineering (Beijing University of Technology), Beijing 100124, China)
In order to promote the level of service evaluation and riding environment improvement of non-motorized vehicles, it is necessary to study non-motorized vehicle riding behavior characteristics based on road and traffic environment conditions. This paper specifically studied non-motorized vehicle lanes physically separated from vehicular traffic and without crosswalk markings. Based on the analysis of riding behavior influence factors, the paper collected information of non-motorized vehicles riding behavior on typical sections with different road and traffic environment conditions.It researched on riding behavior characteristics such as speed, acceleration, acceleration rate of change, lateral movement using the 2D motion image analysis technology and mathematical statistics analysis method.It analyzed the riding behavior characteristics under different road and traffic environment conditions. Based on the road and traffic environment conditions, we finally established non-motorized vehicle riding behavior characteristic model by using the general regression neural network.The results show that general regression neural network (GRNN) model can better predictnon-motorized vehicle riding behavior characteristics based on road and traffic environment conditions.
non-motorized vehicle; road and traffic environment; riding behavior characteristics; GRNN
10.13986/j.cnki.jote.2015.04.008
2015- 03- 31.
北京科技计划项目(Z141100000714008).
曹士强(1990—), 男, 硕士研究生, 主要研究方向为交通规划与交通流理论. E-mail:caosq@126.com.
U 491
A
1008-2522(2015)04-44-05