机器视觉在车辆外廓尺寸检测中的技术研究
2015-04-10吴黎明陈嘉源李福坚杨耀光
蔡 文,吴黎明,陈嘉源,李福坚,杨耀光
(1.广东工业大学 信息工程学院,广东 广州 510006;2.佛山市南华仪器股份有限公司,广东 佛山 528251)
机器视觉在车辆外廓尺寸检测中的技术研究
蔡 文1,吴黎明1,陈嘉源1,李福坚1,杨耀光2
(1.广东工业大学 信息工程学院,广东 广州 510006;2.佛山市南华仪器股份有限公司,广东 佛山 528251)
针对国家治理车辆超限工作的开展,以及车辆外廓检测中面临的测量物体大、距离远和测量难度大等问题,本文提出了一种新型的车型外廓检测方案,利用了机器视觉和激光光幕的精确性与可靠性,进行了系统设计以及实验验证。系统可自动对行进中的车辆进行非接触式测量,在规定的车速(≤10 km/h)内带来的测量误差小于1%,测量时间小于60 s,且系统运行稳定可靠。可有效地提高车辆外廓检测的自动化程度和测量精度,且本系统的硬件成本低,适用面广。
机器视觉;激光光幕;车辆尺寸自动检测
据统计,在造成交通事故的原因中,车辆改装而超载、过载造成的交通事故占的比率超过65%。造成路面毁坏、桥梁坍塌事故的原因中,车辆超载、过载占到40%50%。可见车辆改装超重给国民生命安全和国家财产损失带来了巨大的影响。
新的GB21861要求对非营运以外的机动车进行车辆外廓尺寸检测,规定对大中型客货车使用自动测量装置,并对自动测量装置有如下的描述:“将车辆正直居中驶进测量仪,在驱动状态以不高于5 km/h(或按照说明书要求)的车速平稳通过测量区,测得车辆长度、宽度和高度数值”。根据检测过程中车辆的状态,检测方式又可以分为静态测量和动态测量两种。
车俩外廓尺寸的检测参数包括车俩的长度、宽度和高度,这3个参数的取值应为车辆出厂时的空载参数加上车辆负载时车上突出物的平行线到车身的距离。
目前国内对于车型外廓尺寸的测量主要采用人工测量的方式,检测时需要汽车停止前进,也即静态检测,测量人员拿着测量工具对车型参数进行测量。这种测量方式测量效率低,精度差,测量所需时间长[1-3]。近年来也有不少学者提出一些自动化的测量方案,诸如利用磁感应线圈、压电传感器、红外线收发器等传感器来进行测量[4-6],但是这些测量方案都需要破坏路面进行铺设测量器件,而且这些测量器件由于受天气、车辆辗压等因素的影响,使用寿命都不长,能够获取的车辆信息比较少。
针对新国标的要求和现在社会在车型外廓检测方面技术比较欠缺的现状,提出了一种新的测量方案,整个系统包括龙门支架、测量光幕、工业摄像头、光电开关等部分构成。实现了车型外廓尺寸的高精度、高速、自动化测量。其中高度的测量采用测量光幕,长度和宽度的测量采用工业摄像头。
1 系统测量原理
车辆的长度、宽度和高度在三维空间中是沿3个不同方向的物理量,3个参数各有其特性,例如长度的测量可以利用车辆行驶时的速度信息结合行驶时间近似算出,测宽度时还要考虑汽车后视镜等汽车附着物,而高度的测量干扰相对较少。本文对3个参数的测量采取不同的测量方法。图1为系统的测量原理图。
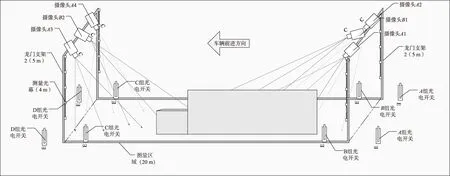
图1 系统的测量原理图
图1中两个支架之间的测量区域为长20 m、宽4 m的长方形,支架宽4 m、高5 m,因车辆高度均超过1 m,故用于测高的测量光幕在离地面1 m以上才安装,可节约成本。摄像头分为A、B两组,A组摄像机与支架所在的平面夹角比B组的小,如图1所示,安装时确保A组摄像头的拍摄范围包括支架并与B组摄像头的拍摄范围有一定区域的交集,A、B两组摄像头的拍摄范围要覆盖整个测量区域。由A、B两组摄像头拍摄的图片经过拼接,得到一幅含有支架和汽车的全景图,利用支架作为标定物算出车辆边缘离支架的距离,因支架1、2自身的宽度以及两支架之间距离已知,从而可以算出汽车的长度和宽度信息。为了减小误差,支架1、2上各自安装的3个摄像机要同时拍摄10组相片,图像处理后取边缘信息最清晰、图形畸变最小的图片来算所需的长度和宽度参数。A,B,C,D这4组光电开关是为了检测车辆是否进入和离开测量区域的。
1.1 畸变处理
在摄像机成像过程中,工业镜头因小孔成像原理会带来一定程度的透视畸变,即照片上看到的近大远小现象。除非相机和被摄平面保持绝对垂直,否则透视畸变是不可避免的。
通过三维空间的仿射变换(变换坐标系,使相机不垂直于被测平面),可以产生透视畸变效果,也就是相当于进行了投影变换。HALCON提供了函数hom_mat3d_project,能把三维仿射变换矩阵转换成二维投影变换矩阵(4×4的矩阵转换成3×3矩阵)。投影变换即由一个平面/立体图形变换到另一个平面/立体图形,变换过程中直线映射为直线(不一定保证平行度)。任何二维投影变换都可以用3×3可逆矩阵表示(齐次坐标),任何三维投影变换都可以用4×4可逆矩阵表示(齐次坐标)。投影变换的矩阵是可逆的,只要经过一次投影变换就可以把拍摄到的具有畸变效果的图片还原为垂直拍摄的照片。
投影变换处理效果如图2、图3所示。

图2 灰度原图

图3 处理效果图
拉格朗日插值:由于输出图像中的像素可能会映射到原图像中没有灰度定义的像素点之间,故采用插值算法确定这些点的灰度值是很有必要的[7]。拉格朗日算法运算速度快、硬件存储低,用于消除图像边缘模糊现象有着显著效果。
n次拉格朗日插值多项式Qn(x)可表示为
(1)

1.2 图像的拼接
图像的拼接是将几张有重合部分的不完整图片拼接成一张包含全部所需信息的全景图像,在本方案中主要是一侧支架上的两个A组摄像机和一个B组摄像机所拍摄的相片拼接为一张相片,要求能无缝拼接,所造成的图像失真要尽可能小。拼接主要工作是提取各幅图像的特征点进行匹配,从而进行图像的融合。
RANSAC是“RANdom SAmple Consensus(随机抽样一致)”的缩写[8-10]。它可以从一组包含局外点的观测数据集中,通过迭代方式估计数学模型的参数,是一种不确定的算法。利用一定的概率得出一个合理的结果,并通过提高迭代次数来提高估计概率。
RANSAC的基本运算步骤如下:
1)考虑一个最小抽样集的势为k的模型和一个样本集Q,集合Q的样本数F(Q)大于k,从Q中随机抽取包含k个样本的Q的子集S初始化模型N。
2)在Q的余集中选取与模型N的误差小于某一设定阈值a的样本集b,由集合b与S构成集合S1。由集合S1构成的内点集称为S的一致集。
3)若集合S1的点数大于阈值A,则利用集S1重新计算新的模型N1;重新随机抽取新的S,重复以上过程。
4) 在完成规定抽样次数后,将得到的最大集合Si的结果输出。
在HALCON中利用RANSAC算法生成的proj_match_points_ransack算子可以通过找到两幅图像中点与点之间的映射计算一个投影变换矩阵[11]。并据此找到多幅图像中的特征点,从何进行图像的匹配拼接。
1.3 图像的定标
在图1中摄像机A1、A2的作用是为了拍到车辆两侧完整的图形,并且确保作为参照物的支架能在图像范围内,同时要与摄像机B1拍摄到的场景有一定程度的重合。A1、A2和B1拍到的3张照片经过图像拼接后能够得到一张比较完整的包含支架与车辆的场景图。

图4 图像坐标示意图
在图4中,当取支架1上3个摄像头所拍摄的照片来获取所需参数时,可取坐标1作为标定坐标;反之,则取坐标2。两个坐标的变换选取是为了使计算结果更加精确与方便。
2 高度测量
高度的测量采用测量光幕,测量光幕是一种特殊的光电传感器,与普通的对射式光电传感器一样,包含相互分离且相对放置的发光器和收光器两部分,但其外形尺寸较大,为长管状。放置在发光器和接收器之间的目标物体将会阻挡一部分光线,使其不能射到相应的接收器器件。使用同步扫描来识别被挡的通道。首先一个发光器通道发出光脉冲而对应的接收器同时来寻找该脉冲,当找到后即完成一个通道的扫描,接着转向下一个通道,直到所有的扫描都完成。当一个周期扫描完成后,系统记录哪些通道通光,哪些通道被遮挡,根据系统定义输出一个信号,该信号可以是模拟量信号,也可以是开关量信号。测量光幕发射器产生的检测光线并非如普通传感器般只有一束,而是沿长度方向定间距生成光线阵列,形成一个“光幕”,以一种扫描的方式,配合控制器及其软件,实现监控和测量物体外形尺寸的功能。光幕的安装如图5所示。
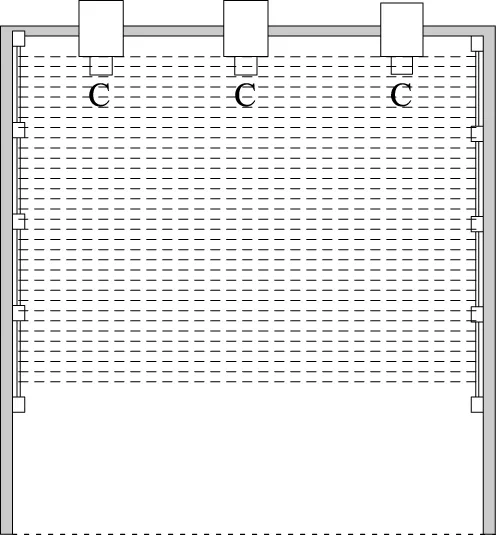
图5 测量光幕示意图
3 长度、宽度测量
如图4所示,当A、B两组光电开关同时被遮挡时可以判定车辆正在向测量区域行驶,之后B组光电开关被释放则可判定汽车完全驶进了测量区域,此时摄像机开始对汽车进行拍照。连续拍摄10组相片,选取最适合进行图像处理的3组图片进行预处理并提取车辆轮廓,图像轮廓的处理应提取车辆附着物最外面的点并取其平行线,车辆左右两侧的最外侧平行线长度即为车身的宽度,车辆前后最外侧的平行线即为车身的长度。
由前面步骤得出的左右边缘直线是平行的,因此可以很方便地选取一组对应点来计算车身宽度。设左右两条平行边缘线的直线方程分别为
(2)
(3)

(4)
式中:Zr是根据高度测量得到的车顶与顶部相机的距离;Zb是标定过程中参考平面与顶部相机的距离。
4 实验分析
为使测量数据具有代表性,进行测量实验时分别选取了大型车、中型车和小型车,每辆车测量3次,测量时汽车运行速度均小于10km/h,且每次测量时汽车的行驶速度不一样。表1中记录了3次测量的实验数据,并进行了误差分析。从表中可以看出,汽车尺寸越大,误差越小;车辆的行驶速度越小,测量误差越小。且其标准差也是随着车型的变大而变小,车型越大则测量数据越稳定、波动性越小。
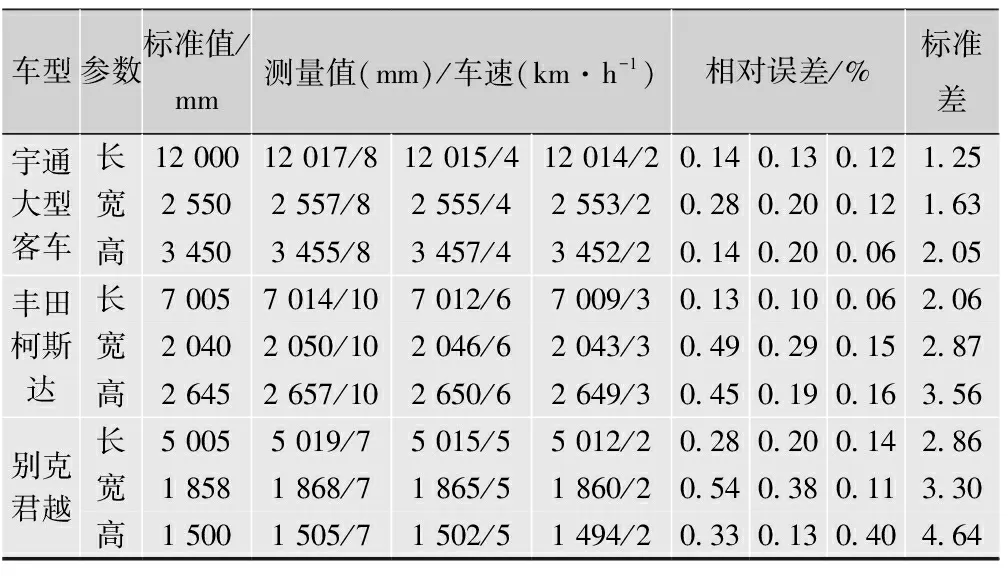
表1 不同车型外廓测量参数
高度测量的误差主要来自测量光幕的分辨率,但是分辨率越高的测量光幕价格越贵,考虑到成本和项目的参数要求,测量光幕的分辨率选为1cm,多次测量取平均值可以使测量误差小于1cm。宽度的测量误差主要是车辆在测量区域内行驶时会发生侧偏,即车身与两个支架的连线不平行,导致A相机组中一个相机的相片中车头挡住了车身,另一边的相机拍摄的车身暴露过多。因此宽度测量时要结合两个支架上的相机对图像进行补偿。长度测量的误差主要是摄像机的同步问题,如果两个支架上的A、B组相机拍摄存在延时误差的话则会导致测得的车身长度变长或变短。另外测量小型车时可能会难以找到适合的图片,因车身过短难以确保两个支架上的相机都能清晰地拍摄到车身。多次拍摄有助于遴选最佳的测长图片。
5 小结
提出一种新型的车辆外廓参数测量方案,并对该方案进行了实验验证。方案的可行性弥补了目前国内对于车型参数测量的自动化程度不高、测量费时费力且精度不高的技术缺陷,有助于国家对于机动车改装且超载、过载的监管治理。相比于目前国内学者提出的一些测量方案,本方案可以对车辆进行不接触、不停车、快速测量等优点,且系统的铺设不需要对现有的道路环境进行太大的改变,可节约成本。测量所需条件简单,测量精度可小于1cm(车速≤10km/h),测量时间小于60s,精度以及可靠性均达到国家标准。
[1]蒋云清,廖小鹏.激光与三维图像处理技术在机动车外廓尺寸动态测量中的应用[J].客车技术与研究,2014,3(3):42-45.
[2]程炎星,杜颍.浅析机动车外廓尺寸动态自动测量装置的应用[J].技术与研发,2013,20(3):33-36
[3]王涛.复杂背景下车型识别技术研究[D].哈尔滨:哈尔滨工程大学,2013.
[4]李灵虎.汽车检测技术发展概况[J].汽车技术,2012 (14):79-81.
[5]袁爱龙.基于视频的汽车车型识别研究[D].成都:电子科技大学,2013.
[6]刘锋.车型识别研究[D].上海:上海交通大学,2009.
[7]王健,陈文艺.投影图像畸变的一种校正方法[J].西安邮电学院学报,2011,16(1):65-69.
[8]尚明姝.基于改进SIFT特征匹配的快速图像拼接算法[J].微电子学与计算机,2014,31(1):64-67.
[9]陈付幸,王润生.基于预检验的快速随机抽样一致性算法[J].软件学报,2005,16(8):1431-1437.
[10]章建军,曹杰.稀疏分量分析的RANSA算法[J].计算机应用研究,2014,31(6):1681-1684.
[11]LIMINGW,FUJIANL,SICHENGC.Animprovedwirelesslocationalgorithminnlosenvironment[J].InformationTechnologyJournal,2013,12(24):8563-8569.
蔡 文(1990— ),硕士生,主研图像处理,嵌入式系统,智能控制;
吴黎明(1962— ),硕士生导师,教授,主研信号与信息处理、通信与信息系统;
陈嘉源(1991— ),硕士生,主研信息智能获取与处理、智能控制、数据挖掘;
李福坚(1989— ),硕士生,主研计算机视觉和嵌入式。
责任编辑:许 盈
Machine Vision Technology Research in Vehicle Outside Dimensions Detection
CAI Wen1,WU Liming1, CHEN Jiayuan1, LI Fujian1, YANG Yaoguang2
(1.SchoolofInformationEngineering,GuangdongUniversityofTechnology,Guangzhou510006,China;2.NanhuaInstrumentsCo.,Ltd.,GuangdongFoshan528251,China)
For the development of national governance vehicle overrun work, and outline detect vehicles in the face of large measurement objects, distance and the difficulty of measuring the big issues.In this paper, a new model outline detection scheme is proposed, using machine vision and laser light curtains accurate and reliability, making the system design and experimental verification.The program can automatically measure the vehicle to travel non-contact measurement, the prescribed speed (10 km/h) within the error caused by less than 1 cm, the measurement time is less than 60 s, and the system is stable and reliable, can effectively improve the degree of automation and accuracy outside the vehicle contour detection, and has low hardware cost of the system, a wide range of applications.
machine vision;laser light curtains;vehicle size automatic detection
广州市科技计划项目(12A3421120033)
TN98
A
10.16280/j.videoe.2015.05.024
2014-08-25
【本文献信息】蔡文,吴黎明,陈嘉源,等.机器视觉在车辆外廓尺寸检测中的技术研究[J].电视技术,2015,39(7).
