无刷直流电动机双闭环调速系统的转矩脉动抑制研究
2015-04-06李珍国周生海王江浩方一鸣
李珍国 周生海 王江浩 方一鸣
(1.燕山大学电力电子节能与传动控制河北省重点实验室 秦皇岛 0660042.国网冀北电力有限公司检修分公司 北京 102488)
无刷直流电动机双闭环调速系统的转矩脉动抑制研究
李珍国1周生海2王江浩1方一鸣1
(1.燕山大学电力电子节能与传动控制河北省重点实验室 秦皇岛 0660042.国网冀北电力有限公司检修分公司 北京 102488)
主要阐述了具有速度/电流双PI控制器的无刷直流电动机(BLDCM)调速系统的转矩脉动抑制技术。传统无刷直流电动机双闭环调速系统因非理想梯形波反电动势和非理想方波相电流存在较大的转矩脉动,为此,提出一种相电流整形和新半桥PWM方式相结合的方法。其中,基于线反电动势常数的相电流整形技术能够解决因非理想梯形波反电动势引起的转矩脉动,通过分析相电流换相过程得到的新半桥PWM方式能够解决因非理想方波相电流引起的换相转矩脉动。通过四象限运行时的Matlab仿真和DSP驱动实验,验证了所提双闭环调速系统的转矩脉动抑制方案的可行性和有效性。
无刷直流电动机 双闭环调速系统 转矩脉动抑制 相电流整形 四象限运行
0 引言
无刷直流电动机(Brushless DC Motor,BLDCM)具有结构简单、出力大和效率高等特点[1]。无刷直流电动机双闭环调速系统作为其典型调速系统,已被广泛应用于汽车电子、家用电器、办公自动化及精密机床等领域。但非理想梯形波反电动势和相电流非理想换相等因素使无刷直流电动机系统存在较大的转矩脉动,在一定程度上制约了其在高准确度、高稳定性场合的应用。因此,无刷直流电动机系统的转矩脉动抑制一直是国内外学者广泛关注的对象。
文献[2-4]通过事先建立的转矩-电流-位置关系数据库,在当前转子位置下由参考转矩或参考电流获得各相参考整形电流,并结合各相实际反馈电流进行闭环控制,以达到电磁转矩最小化的目的。转矩-电流-位置关系数据库是以转矩脉动最小化为目的的电流整形技术的关键,直接影响系统的转矩脉动抑制效果。同时,为提高相电流的动态跟踪性能,电流闭环控制通常采用电流滞环控制技术。文献[4-6]将交流电动机的传统直接转矩控制理论应用到无刷直流电动机,采用了转矩和定子磁链的双闭环控制方式。其中,文献[5]在换相期间采用两相和三相导通相结合的方式解决了换相转矩脉动,并建立了与之相对应的换相期间开关管状态查询表;文献[6]则在全部区域都采用三相导通方式,并由定子直轴分量电流取代了定子磁链。文献[7]将交流电动机的直接自控制理论应用到无刷直流电动机,定义了由导通相位于X-Y平面、非导通相位于Z轴的三维坐标系,使得定子磁链和电压矢量虽然均是三维矢量,但投影到X-Y平面的影像则构成简单的六边形,可解决随转子位置周期性变化的无刷直流电动机定子参考磁链的给定问题。文献[8]采用滞环转矩控制和PWM方式相结合的转矩控制方式,解决了无刷直流电动机直接转矩控制系统因采用一个周期一个电压矢量和低电感造成的较大相电流和转矩脉动问题。文献[9]通过分析4种半桥PWM方式对换相转矩脉动的影响,得出当采用PWM-on型调制方式时换相转矩脉动最小的结论。文献[10,11]通过在换相期间采用三相配合调制的方法,实现了关断相相电流下降速度和开通相相电流上升速度的一致,以达到抑制换相转矩脉动的目的。其中,文献[11]考虑了定子电阻压降的影响。
本文提出了相电流整形和新半桥PWM方式相结合的方法。其中,基于线反电动势常数的相电流整形技术能够解决因非理想梯形波反电动势引起的转矩脉动;新半桥PWM方式能够解决因非理想方波相电流引起的换相转矩脉动。通过四象限运行时的Matlab仿真和DSP驱动实验,验证了提出的双闭环调速系统的转矩脉动抑制方案的可行性和有效性。
1 理论依据
1.1 传统的双PI闭环调速系统
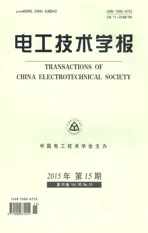
传统的无刷直流电动机双闭环调速系统中,电流内环可采用滞环或PI控制方式。考虑到电流控制器数量、相电流抖动和小电感等因素,本文选用内环为电流PI控制的双闭环调速方式,其系统控制框图如图1所示。系统中的电压型逆变器是如图2所示的三相全桥逆变电路。为提高转矩电流比,无刷直流电动机系统通常采用两相导通方式,即任意时刻只有两相工作,另一相处于截止状态。表1给出了基于PWM-on型调制方式下的非换相相电流和开关管状态的查询表。开关管状态中的每位分别表示开关管VT1~VT6的状态,1表示导通,0表示截止,D表示该管的占空比。
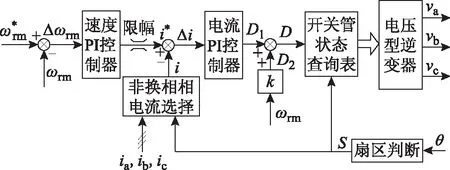
图1 传统的双闭环调速系统Fig.1 Traditional double-loop speed control system
图2 电压型逆变器和无刷直流电动机等效电路Fig.2 Voltage source inverter and BLDCM equivalent circuit
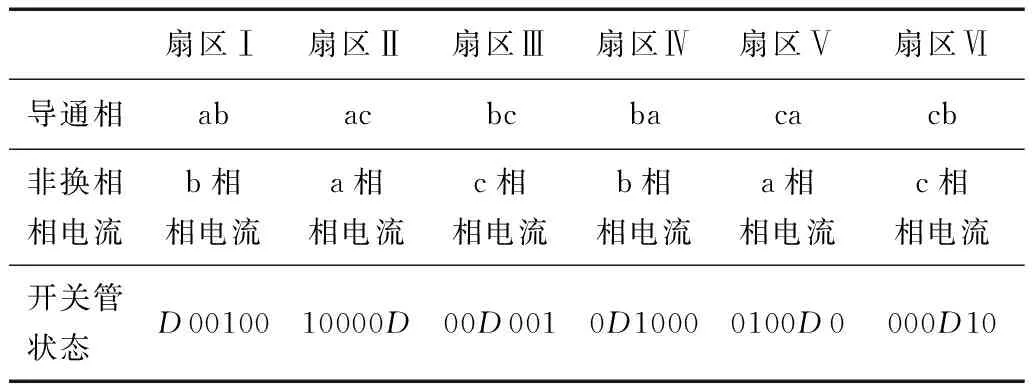
表1 非换相相电流和开关管状态查询表Tab.1 Lookup table of uncommutating phase current and switching devices states
1.2 基于相电流整形的转矩脉动抑制
图3为某一无刷直流电动机的实际相及线反电动势波形。由该波形可知,无刷直流电动机的实际反电动势波形并非理想的梯形波,因此在两相导通期间,若按图1所示框图控制,肯定会产生与之对应的转矩脉动。为此,本文采用基于线反电动势常数的相电流整形技术,如图4所示。以扇区Ⅰ为例,电磁转矩与线反电动势常数及非换相相电流之间的关系为
(1)
式中:Te为电磁转矩;eba和gba分别为绕组端口b、a之间的线反电动势和线反电动势常数;ib为b相相电流;ωrm为转子机械角速度。

图3 实际相及线反电动势波形Fig.3 Actual phase and line back-EMF waveforms
由式(1)看出,在扇区Ⅰ只要通过离线方式得到线反电动势常数gba与转子位置之间的关系,就可计算出对应所需转矩的非换相电流参考值。其他扇区以此类推。由于6个线反电动势波形是60°电角度对称,因此电流整形所需的线反电动势常数与转子位置关系仅需60°电角度内的数据即可,不会占用太多存储容量。
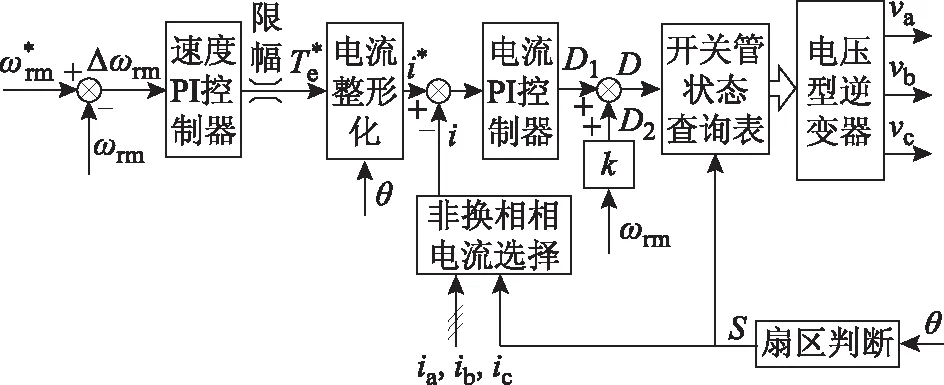
图4 基于相电流整形技术的双闭环调速系统框图Fig.4 Double-loop speed control system based on the phase current shaping method
1.3 换相转矩脉动分析与其对策
在忽略相电阻压降的条件下,分析扇区由Ⅰ到Ⅱ,即ab→ac换相过程中转矩脉动产生的原因。进入扇区Ⅱ的前一时刻,由表1可知,a、b相的绕组首端对母线负极的电压分别为DUdc、0,而a、b、c相的理想相反电动势分别为E、-E、-E,由此可得三相绕组中性点对母线负极的电压为DUdc/2。此时,工作中的a、b两相绕组的电流微分方程为
(2)
式中E为理想相反电动势的峰值。
若忽略两相导通期间的非理想梯形相反电动势波形的影响,则a相电流的变化率近似为0,因此该时刻D值近似为
(3)
进入扇区Ⅱ的后一时刻,考虑到换相期间存在b相电流,由表1可知,a、b、c相的绕组首端对母线负极的电压分别为Udc、Udc、(1-D)Udc,而a、b、c相的理想反电动势分别为E、-E、-E,由此可得三相绕组中性点对母线负极的电压为[(3-D)Udc+E]/3。此时,三相绕组的电流微分方程为
(4)
由于前后时刻D值受电流PI控制器的制约,不会发生突变,因此将式(3)代入式(4)可得
(5)
由此看出,在换相期间,非换相电流即a相电流不会保持恒值,而是逐步减小;关断相即b相的电流变化率大于开通相即c相的电流变化率。因此,如图4构成的双闭环调速系统必将产生较大的换相转矩脉动。其他换相期间的情况与以上分析类似。
由式(4)可知,若D值为4E/Udc,则可得
(6)
由此看出,在换相期间,当D值为4E/Udc时,非换相电流即a相电流能保持恒值;关断相即b相的电流变化率等于开通相即c相的电流变化率,且能够加快换相时间。因此只要在换相期间D值取值为2D,换相结束后D值重回原值时可解决如图4构成的双闭环调速系统的换相转矩脉动。换相结束与否可根据关断相即b相电流是否逼近0来判断。该方法仅在原开关管状态查询表的基础上,只要判断出当前时刻处于换相期间,则在原有控制器输出的D值基础上乘2即可。该方法对如表1所示的开关管状态查询表的改动较小,具有简单、易实现、可有效缩短换相时间的优点。
1.4 系统的四象限运行
表1给出的开关管状态查询表仅能使调速系统运行于第Ⅰ象限。如在扇区Ⅰ,因D值的取值范围为0~1,按照表1,a、b相绕组首端间的线电压只能是DUdc≥0,使电流由a相至b相流通,无法实现电流的反向、转速的快速下降和反向运行等。为此,通过分析在各象限下的具体运行需求,建立了如表2所示的适用于四象限运行的开关管状态查询表。可看出,该表仍遵循两相半桥120°电角度导通方式,涵盖了正负转速和正负转矩下的所有开关管状态。
表2根据D值符号将每个象限中的各扇区再细分为两种情况,这是因为有D的取值为正或负的情况。如在第Ⅰ象限、扇区Ⅰ,转速较高时,D的取值通常不小于零;但若转速较低,且电流PI控制器的输出为较大负值时,有可能出现D<0的情况。根据表2,此时a、b相绕组首端对母线负极的电压分别为(1+D)Udc、Udc,a、b相之间的线电压仍为DUdc,能够实现电流PI控制器在这两种情况之间的平滑过渡。
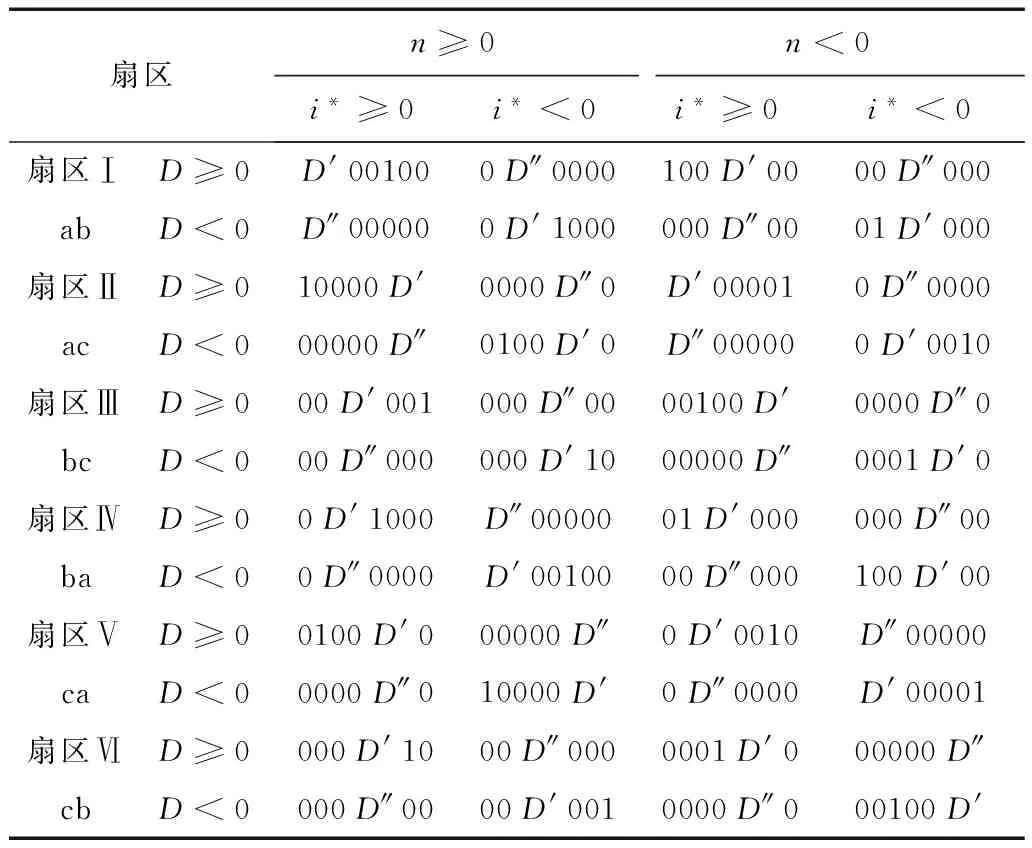
表2 四象限运行下的开关管状态查询表Tab.2 Lookup table of switching devices states under four-quadrant operation
注:D′=|D|,D″=1-|D|
电动机在第Ⅲ象限稳定运行,即反向稳定运行时,开关管状态主要集中在表2中同时满足n<0、i*<0且D<0的部分。如在扇区Ⅰ,根据表2,a、b相绕组首端对母线负极的电压分别为0、-DUdc,a、b相之间的线电压DUdc<0,与第Ⅰ象限的扇区Ⅰ稳定运行时的情况仅符号相反。通过在该象限内的换相转矩脉动的分析可知,1.3节阐述的在换相期间将D值提升2倍的方法仍可适用。因其分析方法与前节完全相同,在此不再赘述。
电动机在第Ⅱ象限稳定运行时,开关管状态主要集中在表2中同时满足n≥0、i*<0且D≥0的部分。如在扇区Ⅰ,根据表2,a、b相绕组首端对母线负极的电压分别为DUdc、0,a、b相之间的线电压DUdc>0。当电动机从第Ⅰ象限稳定运行突然切换到第Ⅱ象限时,根据表2可知,将会出现上下桥臂开关管的直通现象。如在扇区Ⅰ,参考电流符号变反,导致进行PWM控制的开关管由a相的上桥臂直接转换到下桥臂,发生上下开关管直通。为此,在这种特殊情况下人为地插入一次开关管全截止状态(000000),不但可避免上下桥臂直通,而且可加快过渡进程。在其他扇区,在此情况下同样需要人为地插入开关管全截止状态。
2 仿真及实验验证
2.1 电动机主要参数
为了验证所提转矩脉动抑制方案的有效性,对一台三相5对极无刷直流电动机进行仿真和实验。电动机的额定电压、额定转速和额定功率分别为300 V、3 000 r/min和400 W,相绕组的电阻、电感分别为3.05 Ω、17 mH。仿真采用Matlab M-file文件,电流采样和控制周期定为50 μs,电动机数学模型中采用的步长定为0.1 μs。图5示出了无刷直流电动机的双闭环控制实验系统。实验中使用的DSP采用TI公司的TMS320F28335-150,内外环的控制周期分别定为50 μs和500 μs。直流母线电压为300 V,负载采用Magtrol公司的磁滞测功机(HD-705-8NA-0100型),可提供独立于转速的制动转矩,额定转矩为6.2 N·m,准确度为±0.5%。该测功机由同一家公司提供的DSP6001型控制器驱动,可通过控制面板设定制动转矩大小。

图5 无刷直流电动机双闭环控制实验系统图Fig.5 Double-loop speed control system of BLDCM
2.2 传统的双PI闭环控制系统
图6和图7给出了转速分别为570 r/min和1 070 r/min、额定负载为1.27 N·m时,传统双PI闭环控制系统的仿真和实验结果。该仿真和实验的开关管查询表采用表1所示的PWM-on型调制方式。图中的实际转矩由反电动势常数和相电流相乘获得,相电压是相绕组首端对母线负极的电压。
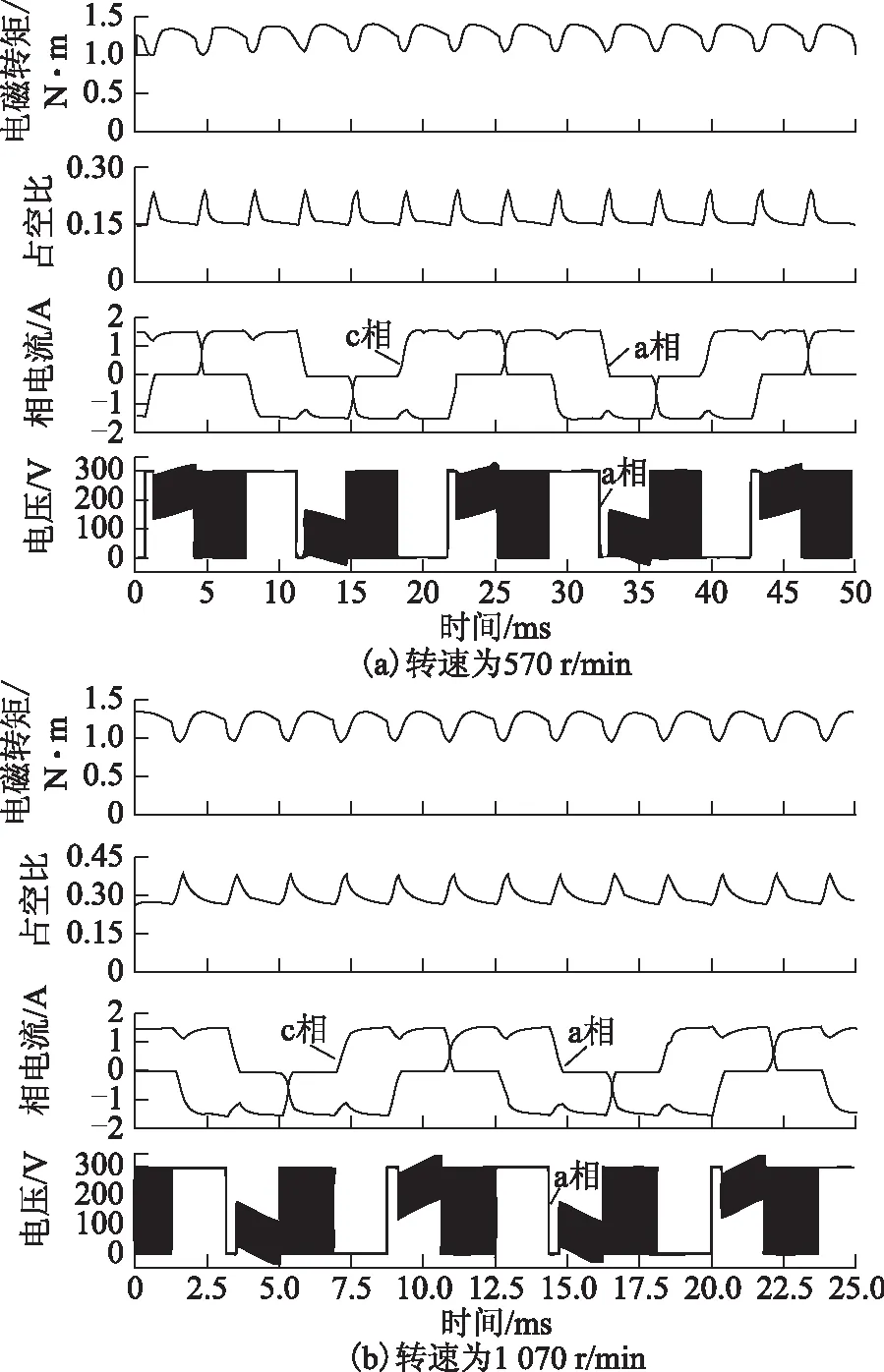
图6 传统双PI闭环控制系统的仿真结果(额定负载)Fig.6 Simulation result of traditional double-loop control system (rated load)
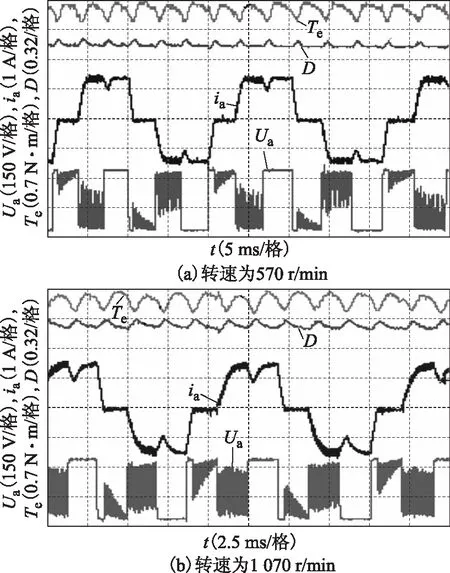
图7 传统双PI闭环控制系统的实验结果(额定负载)Fig.7 Experimental result of traditional double-loop control system (rated load)
由图6和图7可知,传统双PI控制系统存在由非理想梯形波反电动势和非理想换相引起的较大转矩脉动,其值甚至可达30%以上。此外,因在换相期间非换相相电流减小,造成换相期间占空比远高于两相导通期间。
2.3 基于相电流整形技术的双闭环控制系统
图8和图9给出了转速分别为550 r/min和1 035 r/min、额定负载为1.27 N·m时,基于相电流整形技术的双闭环控制系统的仿真和实验结果。该仿真和实验的系统控制框图见图4。图中的参考转矩由系统外环的速度控制器给出,通过电流整形转换成非换相电流的参考值。在实验中,电流整形所需的60°电角度内线反电动势常数与转子位置之间的关系数据库由预先进行的离线实验得到。

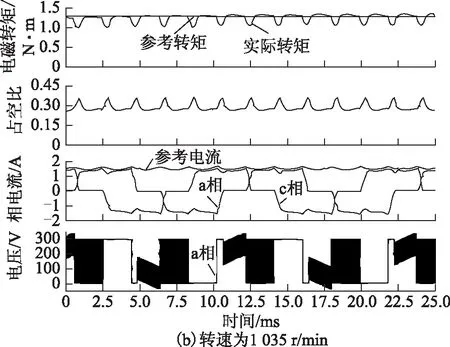
图8 基于相电流整形技术的双闭环控制系统的仿真结果(额定负载)Fig.8 Simulation result of double-loop control system based on the phase current shaping method(rated load)
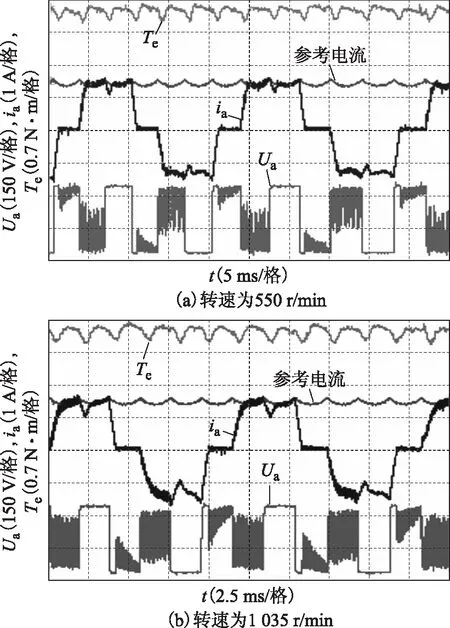
图9 基于相电流整形技术的双闭环控制系统的实验结果(额定负载)Fig.9 Experimental result of double-loop control system based on the phase current shaping method(rated load)
由图8和图9可知,采用相电流整形技术后,可有效改善两相导通期间的转矩脉动,但对换相转矩脉动的抑制效果不大。具体表现为,在换相期间非换相电流无法保持恒值,开通相和关断相的电流变化率相差较大,完全符合之前的理论分析。
2.4 考虑换相转矩脉动抑制的双闭环控制系统
图10和图11给出了转速分别为550 r/min和1 025 r/min、额定负载为1.27 N·m时,在基于相电流整形技术的双闭环控制系统中考虑换相转矩脉动抑制后的仿真和实验结果。在换相期间与两相导通时相比,虽然都采用表1所示的PWM-on型调制方式,但占空比相差2倍。电动机是否处于换相期间由关断相相电流值来判断。如在本次仿真和实验中,只要关断相的相电流值大于参考电流的25%,认为电动机在当前时刻处于换相期间。

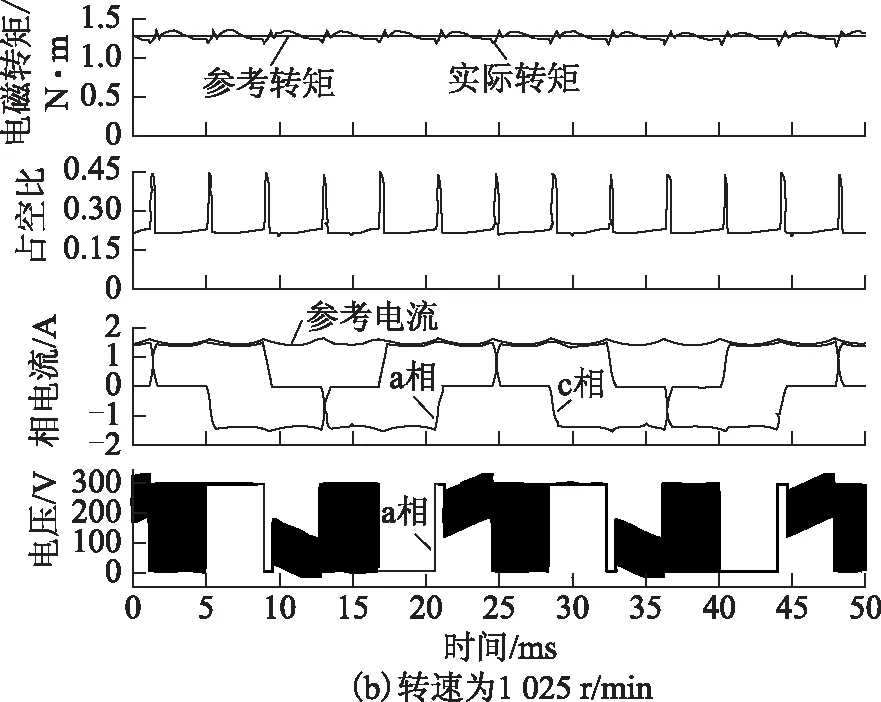
图10 考虑换相转矩脉动抑制的双闭环控制系统的仿真结果(额定负载)Fig.10 Simulation result of double-loop control system considering commutation torque ripple suppression(rated load)
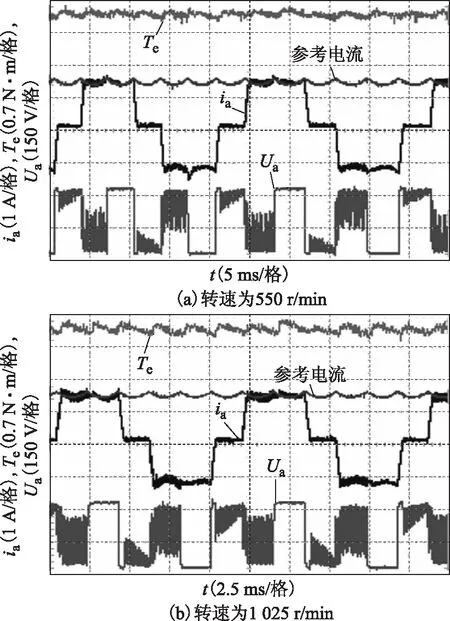
图11 考虑换相转矩脉动抑制的双闭环控制系统的实验结果(额定负载)Fig.11 Experimental result of double-loop control system considering commutation torque ripple suppression(rated load)
由图10和图11可知,对原有的调制方式进行改进后,可显著改善换相转矩脉动,基本控制在10%以内。与图8和图9相比,在换相期间非换相电流能够保持不变,开通相和关断相的电流变化率近似相等,且换相时间明显变短,与之前的理论分析相符。
图12给出了转速分别为520 r/min和1 085 r/min、额定负载为1.27 N·m时,电动机反向稳定运行时的实验结果。其中,负载是反抗性负载,开关管查询表采用表2。电动机反向稳定运行时,转速、转矩和电流皆为负值,与正向稳定运行时相比,仅符号相反。由图可知,电动机反向稳定运行时同样能显著改善转矩脉动,效果良好。
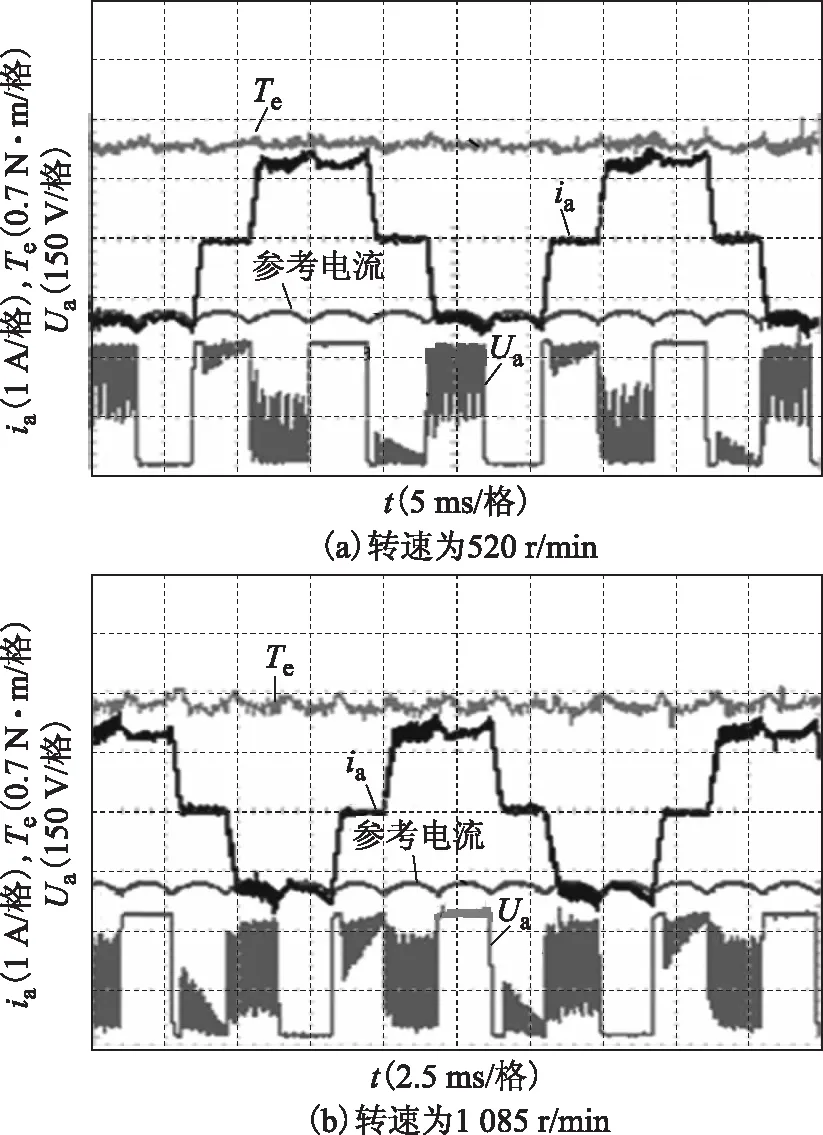
图12 反向稳定运行时的双闭环控制系统的实验结果(额定负载)Fig.12 Experimental result of double-loop control system at reverse stable operation(rated load)
图13给出了一半额定负载和额定负载下,电动机以1 000 r/min的阶跃参考转速下起动,待稳定后再给定-1 000 r/min的阶跃参考转速,使其反向旋转,最后再给定500 r/min的阶跃参考转速时的双闭环速度控制系统实验结果。该实验结果包含电动机的四象限运行,电动机在第一象限以最大转矩起动,并在第一象限正向电动稳定运行,随着-1 000 r/min的阶跃参考转速的给定,经第二象限制动过渡运行,进入第三象限反向电动稳定运行,又随着500 r/min的阶跃参考转速的给定,经第四象限制动过渡运行,回到第一象限正向电动稳定运行。从实验结果可看出,当参考转速符号突变时,在第二和第四象限内的转速变化明显比其他象限快得多,这是因为此时电动机的输出转矩与负载同样都起着阻转矩作用的缘故。
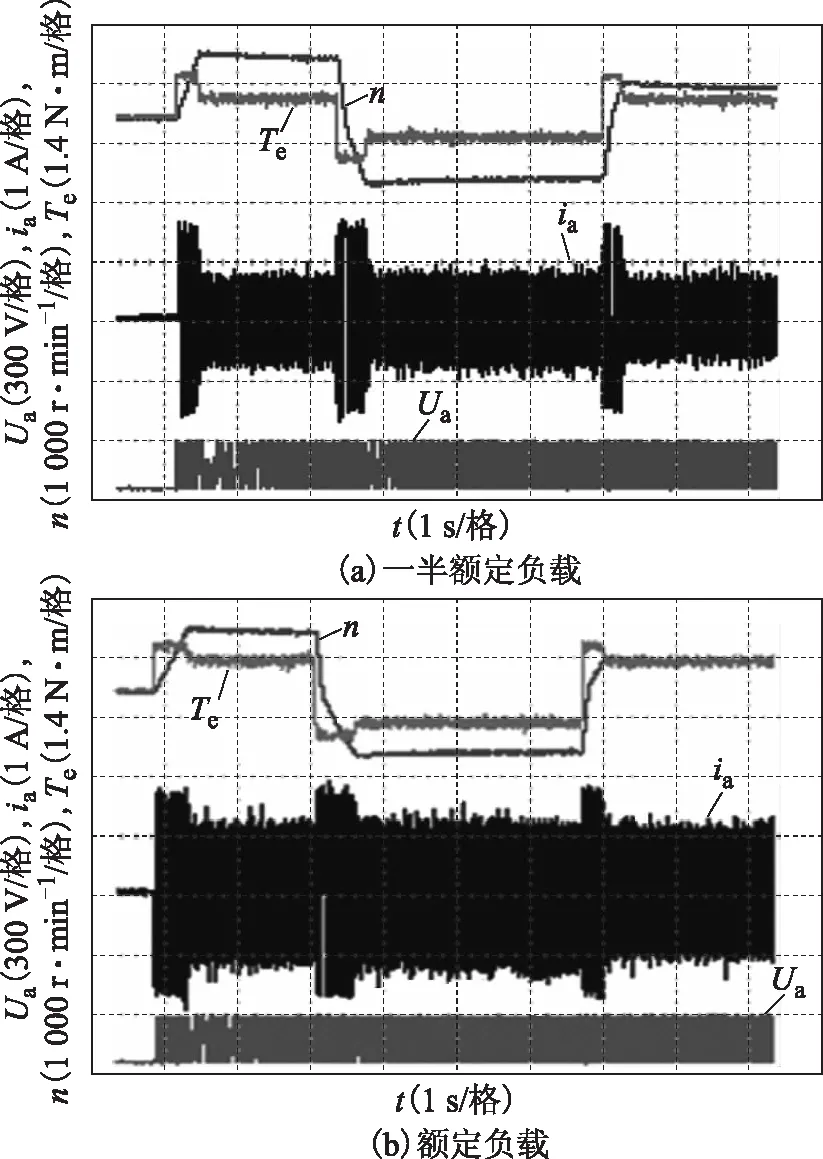
图13 阶跃转速指令下双闭环控制系统的实验结果(1000→-1000→500 r/min)Fig.13 Experimental result of double-loop control system under step speed reference
3 结论
本文在原有无刷直流电动机双闭环调速系统的基础上,提出一种能够实现转矩脉动抑制的方法。该方法结合了相电流整形和新半桥PWM方式,能够解决因非理想梯形波反电动势引起的转矩脉动和因非理想方波相电流引起的换相转矩脉动。相应的Matlab仿真和DSP实验表明,转矩脉动由传统双闭环系统的30%减小到所提控制系统的10%,有效抑制了转矩脉动,验证了所提转矩脉动抑制方案的可行性和有效性。
[1] 夏长亮,方红伟.永磁无刷直流电机及其控制[J].电工技术学报,2012,27(3):25-34. Xia Changliang,Fang Hongwei.Permanent-magnet brushless DC motor and its control[J].Transactions of China Electrotechnical Society,2012,27(3):25-34.
[2] Park S J,Park H W,Lee M H,et al.A new approach for minimum-torque-ripple maximum-efficiency control of BLDC motor[J].IEEE Transactions on Industrial Electronics,2000,47(1):109-114.
[3] Wu A P,Chapman P L.Simple expressions for optimal current waveforms for permanent-magnet synchronous machine drives[J].IEEE Transactions on Energy Conversion,2005,20(1):151-157.
[4] Zhu Z Q,Liu Y,Howe D.Comparison of performance of brushless DC drives under direct torque control and PWM current control[C].Kiee International Transactions on Electrical Machinery and Energy Conversion Systems,2005,5-B:337-342.
[5] Liu Y,Zhu Z Q,Howe D.Commutation-torque- ripple minimization in direct-torque-controlled PM brushless DC drives[J].IEEE Transactions on Industry Applications,2007,43(4):1012-1021.
[6] Ozturk S B,Toliyat H A.Direct torque and indirect flux control of brushless DC motor[J].IEEE Transactions on Mechatonics,2011,16(2):351-360.
[7] Gao J,Hu Y.Direct self-control for BLDC motor drives based on three-dimensional coordinate system[J].IEEE Transactions on Industrial Electronics,2010,57(8):2836-2844.
[8] 李珍国,章松发,周生海,等.考虑转矩脉动最小化的无刷直流电机直接转矩控制系统[J].电工技术学报,2014,29(1):139-146. Li Zhenguo,Zhang Songfa,Zhou Shenghai,et al.Direct torque control of brushless DC motor considering torque ripple minimization[J].Transactions of China Electrotechnical Society,2014,29(1):139-146.
[9] 张相军,陈伯时.无刷直流电机控制系统中PWM 调制方式对换相转矩脉动的影响[J].电机与控制学报,2003,7(2):87-91. Zhang Xiangjun,Chen Boshi.The different influences of four PWM modes on commutation torque ripples in brushless DC motor control system[J].Electric Machines and Control,2003,7(2):87-91.
[10]石坚,李铁才.一种消除无刷直流电动机换相转矩脉动的PWM调制策略[J].中国电机工程学报,2012,32(24):110-116. Shi Jian,Li Tiecai.A PWM strategy to eliminate commutation torque ripple of brushless DC motors[J].Proceedings of the CSEE,2012,32(24):110-116.
[11]王大方,卜德明,朱成,等.一种减小无刷直流电机换相转矩脉动的调制方法[J].电工技术学报,2014,29(5):160-166. Wang Dafang,Bu Deming,Zhu Cheng,et al.A modulation method to decrease commutation torque ripple of brushless DC motors[J].Transactions of China Electrotechnical Society,2014,29(5):160-166.
The Research on the Brushless DC Motor Double-loop Speed Control System for Torque Ripple Reduction
LiZhenguo1ZhouShenghai2WangJianghao1FangYiming1
(1.Key Lab of Power Electronics for Energy Conservation and Motor Drive of Hebei Province Yanshan University Qinhuangdao 066004 China 2.State Grid Jibei Electric Power CO.,LTD.Maintenance Branch Beijing 102488 China)
This paper mainly describes a torque ripple reduction strategy for the brushless DC motor double-loop speed control system.In the traditional double-loop speed control system,brushless DC motor has large torque ripple because of the non-ideal trapezoidal wave back EMF and the non-ideal square wave phase current.So this paper proposes a control method combining the phase current shaping with the new half-bridge PWM mode.The phase current shaping method using line EMF constant can mitigate the torque ripple caused by the non-ideal trapezoidal wave back EMF.The new half-bridge PWM mode,obtained by analyzing the phase current commutation process,will decrease the commutation torque ripple due to the non-ideal square wave phase current.Finally,simulations with Matlab and experiment results with DSP,operating in four-quadrant operation,are presented to verify the feasibility and effectiveness of the proposed strategy.
Brushless DC Motor (BLDCM),double-loop speed control system,torque ripple reduction,phase current shaping,four-quadrant operation
国家自然科学基金委员会与宝钢集团有限公司联合资助项目(U1260203)、国家自然科学基金(51477147)资助项目。
2014-01-01 改稿日期2015-04-15
TM359
李珍国 男,1973年生,博士,副教授,研究方向为电力电子与电力传动。(通信作者)
周生海 男,1986年生,硕士,研究方向为电力电子与电力传动。